

Спектры импульсных сигналов
Современные системы телемеханики используют кодоимпульсный метод модуляции и передачу последовательным кодом.
Рассмотрим спектр частот периодической последовательности видеоимпульсов. Такой последовательностью можно моделировать передачу сигналов кодоимпульсной модуляции.
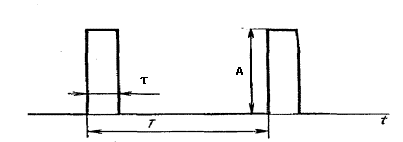
Рис. 5.11. Периодическая последовательность импульсов
Величина i = T/τ представляет собой величину, обратную скважности.
Бесконечная последовательность импульсов является периодической функцией времени F(t), и ее разложение производится помощью ряда Фурье:
 (5.15)
(5.15)
где А0 – постоянная составляющая; Аk – амплитуда k-той гармоники; k – номер гармоники; k=1, 2, 3, ...; Ω=2π/Т – угловая частота; ψk –начальная фаза k-той гармоники;
Для последовательности прямоугольных импульсов имеем:
![]()
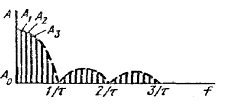
Рис. 5.12. Линейчатый спектр бесконечной последовательности импульсов:
f=Ω/2π
Анализ линейчатого спектра показывает, что воспроизведение формы видеоимпульса зависит только от полосы частот F, которая определяется длительностью видеоимпульса :
ΔFВИ = µ/τ, (5.16)
где µ – коэффициент воспроизведения формы импульса, его величина составляет 1 ≤ µ ≤ 2.
µ = 1 – нижняя граница (по линейчатому спектру).
µ ≤ 2 – практическое ограничение для лучшего использования полосы пропускания линии связи.
Передача импульсов в полосе частот ΔF=(1÷2)/τ вполне удовлетворительна, так как в телемеханике большинство устройств являются пороговыми, чувствительными к амплитуде импульса и нечувствительными к его форме.
Иногда в целях экономии полосы частот, а также в случаях, когда воспроизводимая форма импульса не играет особой роли, принимают μ=1/2. При такой сокращенной полосе частот Fmin=0,5/τ предельная скорость передачи определяется следующим образом.
Так как B=1/τ [Бод] и Fmin=1/2τ,
Bmax=2Fmin. (5.17)
Передачу сигналов разностно-дискретной модуляции и лямбда-дельта-модуляции можно моделировать непериодической последовательностью. Непрерывный cпектр частот непериодической последовательности определяется выражением
![]() .
(5.18)
.
(5.18)
Подставляя в это выражение подынтегральную функцию в виде прямоугольного видеоимпульса, получим непрерывный спектр, графическое отображение которого представлено на рис. 5.13.
Он напоминает график, показанный на рис. 5.12, отличаясь типом спектра. Из него видно, что и в этом случае
ΔFВИ = µ/τ , (5.19)
где µ – коэффициент воспроизведения формы импульса, его величина составляет 1 ≤ µ ≤ 2.
Подстановка в (5.18) в качестве подынтегральной функции в виде прямоугольного радиоимпульса даёт также непрерывный спектр, графическое отображение которого представлено на рис. 5.14.
Из него видно, что спектр частот радиоимпульса симметричен относительно несущей частоты f1, основные соотношения его формы совпадают с соотношениями спектра частот видеоимпульса.

Рис. 5.13. Непрерывный cпектр частот видеоимпульса
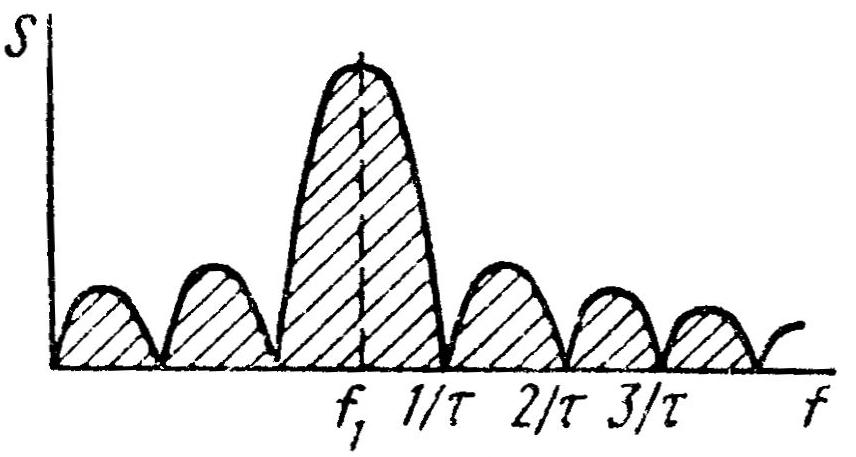
Рис. 5.14. Непрерывный спектр частот радиоимпульса:
f1 – частота несущей, τ – длительность радиоимпульса
По графику рис. 5.14 очевидно, что полоса пропускания, необходимая для передачи радиоимпульса,
ΔFри =2µ/τ, (5.20)
где µ – коэффициент воспроизведения формы импульса, его величина составляет 1 ≤ µ ≤ 2.
Сравнение формул (5.16), (5.19) и (5.20) показывает, что полоса пропускания частот линии связи при передаче импульсного сигнала определяется длительностью передаваемого импульса