

Терехин. Учебное пособие
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
В.Б. Терёхин
МОДЕЛИРОВАНИЕ СИСТЕМ ЭЛЕКТРОПРИВОДА В SIMULINK (MATLAB 7.0.1)
Допущено УМО по образованию в области энергетики и электротехники в качестве учебного пособия для студентов высших учебных заведений, обучающихся по специальности 140604 – «Электропривод и автоматика промышленных установок и технологических комплексов»
направления подготовки 140600 – «Электротехника, электромеханика и электротехнологии»
Издательство Томского политехнического университета
2010
УДК 62 83 52.001.5(075.8) ББК 31.291я73
Т35
Терёхин В.Б.
Моделирование систем электропривода в Simulink (Matlab 7.0.1): Т35 учебное пособие / В.Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд во Томского
политехнического университета, 2010. – 292 с.
ISBN 978 5 98298 587 3
В пособии излагаются принципы моделирования различных элементов систем электропривода постоянного и переменного тока в Simulink. Рассма триваются особенности моделирования сложных автоматизированных си стем электропривода с учётом нелинейностей и различного рода возмуща ющих факторов. Приводятся результаты исследования наиболее типичных и важных режимов его работы. Даются рекомендации по технике моделиро вания. Также к данному пособию прилагается компакт диск с моделями, на которые в пособии сделаны ссылки.
Предназначено для студентов, обучающихся по специальности 140604 «Электропривод и автоматика промышленных установок и технологиче ских комплексов», и инженеров, проектирующих регулируемые электро приводы.
УДК 62 83 52.001.5(075.8) ББК 31.291я73
Рецензенты
Доктор технических наук, профессор ТУСУРа
В.А. Бейнарович
Кандидат технических наук, доцент ТПУ
А.Ю. Чернышев
ISBN 978 5 98298 587 3 © ГОУ ВПО «Национальный исследовательский Томский политехнический университет», 2010
©Терёхин В.Б., 2010
©Оформление. Издательство Томского политехнического университета, 2010
СОДЕРЖАНИЕ
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
1. МОДЕЛИРОВАНИЕ ЭЛЕМЕНТОВ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА . . . . . . . . . . . . . . . . . . . .7
1.1. Машина постоянного тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 1.1.1. Исследования модели двигателя в Simulink . . . . . . . . . . . . . . . . . . .7 1.1.2. Модернизированная модель двигателя постоянного тока . . . . . .22 1.2. Машина переменного тока (асинхронная) . . . . . . . . . . . . . . . . . . . . . . . .37
1.2.1.Математическое описание обобщенной асинхронной машины .37
1.2.2.Определение параметров схемы замещения
асинхронной машины по данным каталога . . . . . . . . . . . . . . . . . . .54 1.2.3. Исследование модели асинхронного двигателя в Simulink . . . . . .59 1.2.4. Исследование модернизированной модели
асинхронного двигателя в Simulink . . . . . . . . . . . . . . . . . . . . . . . . . .64 1.2.5. Разработка структуры асинхронного двигателя в Simulink . . . . . .71 1.3. Нереверсивные тиристорные преобразователи . . . . . . . . . . . . . . . . . . . .88 1.3.1. Двухфазный тиристорный преобразователь . . . . . . . . . . . . . . . . . .88
1.3.2. Нереверсивный мостовой трёхфазный тиристорный преобразователь . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94
1.3.3. Нереверсивный нулевой трёхфазный тиристорный преобразователь . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
1.4. Реверсивные тиристорные преобразователи с совместным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
1.4.1. Реверсивный двухфазный тиристорный преобразователь с совместным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
1.4.2. Реверсивный трёхфазный тиристорный преобразователь с совместным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
1.4.3. Реверсивный трёхфазный тиристорный преобразователь с совместным управлением по нулевой схеме . . . . . . . . . . . . . . . .119
1.5. Реверсивные тиристорные преобразователи с раздельным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
1.5.1. Модель логического переключающего устройства . . . . . . . . . . . .121 1.5.2. Модель датчика состояния тиристоров . . . . . . . . . . . . . . . . . . . . . .123
1.5.3.Модель переключателя характеристик (полярности сигнала) . .124
1.5.4.Реверсивный двухфазный тиристорный преобразователь
с раздельным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .125 1.5.5. Реверсивный трёхфазный тиристорный преобразователь
с раздельным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .128
3
1.6. Транзисторные широтно импульсные преобразователи для управления двигателями постоянного тока . . . . . . . . . . . . . . . . . . .131
1.6.1. Симметричный способ управления . . . . . . . . . . . . . . . . . . . . . . . . .131 1.6.2. Несимметричный способ управления . . . . . . . . . . . . . . . . . . . . . . .136 1.7. Преобразователи частоты (автономные инверторы) . . . . . . . . . . . . . . .139 1.7.1. Разомкнутый способ реализации ШИМ . . . . . . . . . . . . . . . . . . . .139 1.7.2. Замкнутый способ реализации ШИМ (токовый коридор) . . . . .142
2. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА . . . . . . . . . . . . . . . . . . . . . .147 2.1. Разомкнутые . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .147 2.1.1. Автоматическое управление в функции времени . . . . . . . . . . . . .147 2.1.2. Автоматическое управление в функции скорости . . . . . . . . . . . .151 2.1.3. Автоматическое управление в функции тока . . . . . . . . . . . . . . . . .152 2.2. Замкнутые нереверсивные . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153 2.2.1. Тиристорные электроприводы . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153 2.2.2. Транзисторные электроприводы . . . . . . . . . . . . . . . . . . . . . . . . . . .157 2.3. Замкнутые реверсивные . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172
2.3.1. Тиристорные электроприводы с совместным управлением по нулевой схеме включения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172
2.3.2. Тиристорные электроприводы с раздельным управлением . . . .180
3. РАЗОМКНУТЫЕ ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА . . . . . .191 3.1. Мягкие частотный пуск и остановка асинхронного двигателя . . . . . .191
4. ЧАСТОТНО ТОКОВЫЙ ЭЛЕКТРОПРИВОД С ВЕКТОРНЫМ УПРАВЛЕНИЕМ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .195
4.1. Общие положения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .195
4.2.Математическое описание векторного управления двигателем . . . . .197
4.3.Оптимизация и имитационное исследование
в Simulink контура тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .206 4.3.1. Расчёт параметров регулятора тока
при идеальном источнике тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . .206 4.3.2. Исследование влияния насыщения регулятора, квантования
сигнала токовой обратной связи по уровню и времени . . . . . . . .210
4.3.3.Исследование влияния реальных свойств преобразователя частоты на статические
и динамические свойства контура тока . . . . . . . . . . . . . . . . . . . . .214 4.4. Оптимизация и имитационное исследование
в Simulink контура потока . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .218 4.4.1. Расчёт параметров регулятора потока
при идеальном источнике тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . .218
4.4.2.Исследование влияния насыщения регулятора, квантования и задержки сигнала обратной связи,
способа реализации источника тока . . . . . . . . . . . . . . . . . . . . . . . .221 4.5. Оптимизация и имитационное исследование
в Simulink контура скорости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .226
4
4.5.1. Расчёт параметров регулятора скорости при идеальном источнике тока . . . . . . . . . . . . . . . . . . . . . . . . . . . . .226
4.5.2. Исследование влияния насыщения регуляторов, квантования и запаздывания сигнала обратной связи . . . . . . . . .230
4.5.3. Исследование влияния способа реализации источника тока (инвертора) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .237
4.6. Имитационное моделирование структуры электропривода переменного тока с векторным управлением . . . . . . . . . . . . . . . . . . . . .241 4.6.1. Моделирование в Simulink при реализации инвертора
с широтно импульсным управлением . . . . . . . . . . . . . . . . . . . . . . .241 4.6.2. Моделирование в Simulink при реализации инвертора
с релейным управлением . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .248 4.6.3. Моделирование структуры электропривода
с векторным управлением с выводом тока статора в неподвижной системе координат . . . . . . . . . . . . . . . . . . . . . . . . .254
5. ВИРТУАЛЬНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ВЕКТОРНЫМ УПРАВЛЕНИЕМ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .257 5.1. Разработка на основе инвертора
с широтно импульсной модуляцией . . . . . . . . . . . . . . . . . . . . . . . . . . . .257
5.1.1.Реализация источника питания инвертора в виде батареи . . . . .257
5.1.2.Реализация источника питания инвертора
в виде выпрямителя . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .268 5.2. Разработка на основе инвертора с релейным управлением . . . . . . . . .274
5.2.1.Реализация источника питания инвертора в виде батареи . . . . .274
5.2.2.Реализация источника питания инвертора
в виде выпрямителя . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .284 Список литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .291
5
ВВЕДЕНИЕ
Компьютерные технологии прочно закрепились в высшей школе и широко используются не только для оформления текстовой и графической частей учебных работ, но и для изучения и исследования сложных систем и процессов. Совершенно очевидно, что качество подготовки специалистов зависит от применяемого многообразия форм и методов представляемого учебного материала. Натурное изучение и исследование остаётся предпоч тительной формой подготовки, но не может быть обеспечено в полной ме ре, особенно при изучении специальных дисциплин.
Цель работы состоит в предоставлении возможности изучения, про ектирования и исследования элементов автоматизированного электропри вода постоянного и переменного тока и электроприводов в целом с приме нением программного продукта Matlab 7.0.1 (Simulink). Отличительной особенностью пособия является представление разработанных в Simulink моделей элементов и приводов постоянного и переменного тока. Студент имеет возможность приступить к изучению интересующего привода на ос нове предлагаемых моделей, предварительно произвести необходимые для проектирования исследования и выполнить разработку на высоком техни ческом уровне. Так как при разработке моделей большинство используе мых элементов из библиотеки Simulink модернизированы, то предлага емые модели в пособии работоспособны только в Matlab 7.0.1.
Пособие состоит из пяти глав.
Первая глава посвящена моделированию двигателей и элементов ав томатизированного электропривода постоянного и переменного тока.
Во второй главе рассматриваются модели разомкнутых и замкнутых электроприводов постоянного тока.
Втретьей главе приведён пример модели разомкнутого электропри вода переменного тока с преобразователем частоты, управляемого задат чиком интенсивности.
Вчетвёртой главе приведены модели структуры электропривода пе ременного тока с векторным управлением.
Впятой главе рассматриваются виртуальные асинхронные электро приводы с векторным управлением. Применено широтно импульсное и релейное управление инверторами. Включены в модель источник пита ния и цепь гашения энергии, отдаваемой электрическим двигателем в тормозных режимах.
6

1. МОДЕЛИРОВАНИЕ ЭЛЕМЕНТОВ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
1.1.Машина постоянного тока
1.1.1.Исследования модели двигателя в Simulink
Модель машины постоянного тока (двигателя) находится в би блиотеке SimPowerSystems в разделе Machines. Изображение двигателя постоянного тока представлено на рис. 1.1, а модель его в Simulink – в файле Fig 1_1.
TL |
|
m |
|
A+ |
dc |
A- |
Рис. 1.1. Условное изображение |
F+ |
|
F- |
двигателя постоянного тока |
|
в SimPowerSystems (Fig 1_1) |
DC Machine
Выводы F+ и F– служат для подключения напряжения возбужде ния в целях создания магнитного потока в машине. Выводы A+ и A– используются для подключения обмотки якоря на силовой источник питания. Активная нагрузка на двигатель вводится через виртуальный вход TL. Выходные параметры двигателя: частота вращения ω, ток об мотки якоря Ia, ток возбуждения If и электромагнитный момент Te фор мируются на мультиплексорной шине m. Чтобы получить доступ к вы ходным параметрам, необходимо использовать демультиплексор на че тыре выхода и соединить его вход с точкой m. Тогда на первом (верх нем) выходе действует частота вращения, на втором – ток обмотки яко ря, на третьем – ток возбуждения и на четвёртом – электромагнитный момент двигателя.
7
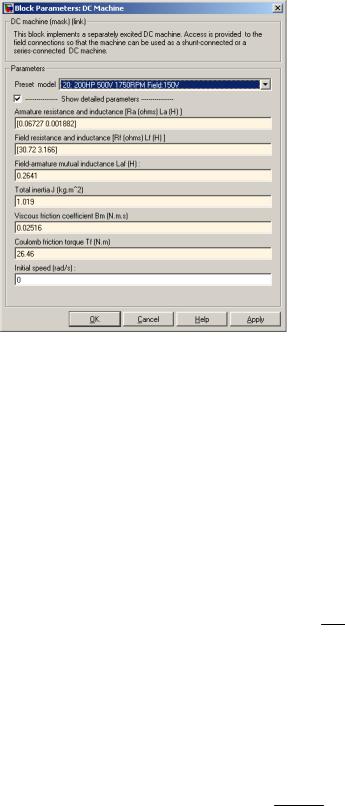
Рис. 1.2. Диалоговое окно ввода параметров двигателя
Ввод параметров двигателя осуществляется через диалоговое окно (графический интерфейс), которое открывается двойным щелчком по изображению двигателя в схеме модели на Fig 1_1 (рис. 1.2). В Simulink имеется небольшая библиотека двигателей постоянного тока в виде 23 вариантов, из которых 21–23 не вызываются. На рис. 1.2 показаны данные двигателя по 20 му варианту:
•Ra – активное сопротивление цепи якоря, включающее сопротив ление обмотки якоря, сопротивление щёточно коллекторного уз ла и активное сопротивление обмотки дополнительных полюсов. Величина суммарного сопротивления якорной цепи, если нет дан ных, приближенно определяется по формуле:
Ra = 0,5(1−ηí ) Uí ;
Ií
•La – индуктивность рассеяния цепи обмотки якоря, включающее индуктивность рассеяния обмотки якоря и индуктивное сопротив ление обмотки дополнительных полюсов. Если нет данных, ин дуктивность рассеяния якорной цепи двигателя может быть вычи слена по приближенной формуле:
La =γ Uí , pωí Ií
где Uн – номинальное напряжение обмотки якоря двигателя; Iн – номинальный ток обмотки якоря; ωн – номинальная частота
8
вращения якоря; р – число пар полюсов двигателя; γ – коэффици ент; γ= 0,6 – для некомпенсированных машин; γ= 0,25 – для ком пенсированных машин;
•Rf – активное сопротивление обмотки возбуждения двигателя;
•Lf – индуктивность обмотки возбуждения двигателя. Ее можно определить по кривой намагничивания цепи возбуждения при из вестном значении числа витков катушки полюса Wв как
L |
|
= 2 pW 2 |
Ô |
; |
f |
|
|||
|
â |
(IW )â |
|
|
|
|
|
|
•Laf – взаимная индуктивность обмоток возбуждения и обмотки якоря двигателя. Определяется взаимная индуктивность по номи нальным параметрам двигателя как
L = |
KE |
= |
Uí −Ra Iaí |
= |
Uí −Ra Ia í |
, |
(1.1) |
||
|
|
|
|||||||
af |
I f |
|
ωí If |
ωí |
U fí |
|
|
||
|
|
|
|||||||
|
|
|
|
|
Rf |
|
|||
где KE – постоянная эдс двигателя, так как |
|
||||||||
|
|
|
Å = KÅω, |
|
|
|
|
(1.2) |
|
Е – противоэдс двигателя; Ufн – номинальное напряжение возбуждения; J – приведенный к валу двигателя момент инерции, включающий мо мент инерции двигателя и момент инерции производственного меха низма; Bm – коэффициент, с помощью которого вводится на вал двига теля реактивный момент сопротивления, определяемый как Tm = Bm.ω; Tf – реактивный момент сопротивления. Однако, этот параметр, вводи мый через диалоговое окно (см. рис. 1.2), моделью не воспринимается в связи с принципиальной ошибкой моделирования реактивного момен та сопротивления. К этому вопросу мы вернёмся позже.
Следует отметить, что редактирование вводимых параметров (из менение числовых значений) возможно только тогда, когда в строке Preset model (рис. 1.2) будет выбрана процедура No.
Рассмотрим структуру модели двигателя, открыв файл Fig 1_1 и динамическое меню двойным щелчком правой кнопкой мыши (рис. 1.3), ориентируя курсор на изображение двигателя. Выбираем команду Lock Under Mask и раскрываем структуру модели двигателя (рис. 1.4).
Структура включает датчик тока обмотки якоря iA и датчик тока обмотки возбуждения iF. Элементы iA, iF, Ra, La, FCEM (управляемый ис точник напряжения), Rf, Lf входят в состав библиотеки SimPowerSystems.
9

Все остальные блоки структуры (рис. 1.4) реализованы на элементах, входящих в библиотеку Simulink. Раскроем блок Mechanics двойным щелчком мыши (рис. 1.5). Блок Mechanics выполняет моделирование момента и скорости.
|
|
Рис. 1.3. Динамическое меню |
|
|
|||
1 |
+ |
i |
|
|
|
|
|
- |
|
|
|
|
|
||
A+ |
iA |
Ra La |
|
|
+ |
||
|
|
|
|||||
|
|
|
|
|
FCEM |
||
|
|
|
|
|
|
|
|
|
|
TL |
|
|
|
s |
- |
|
|
TL |
|
|
|
|
|
|
|
1 |
FCEM |
|
|
|
|
|
|
|
ia |
m |
In1 Out1 |
1 |
|
|
|
|
if |
2 A- |
|||
|
|
|
Mechanics |
Measurement list |
m |
|
|
|
|
|
|
|
|
||
3 |
+ |
i |
|
|
4 |
|
|
F+ |
|
- |
|
|
|
|
|
iF |
Rf |
Lf |
F- |
|
|
||
|
|
|
|||||
|
|
|
|
|
|
||
Рис. 1.4. Структура модели двигателя постоянного тока
10