

4.3. Регулирование скорости асинхронного двигателя в каскадных схемах его включения
Регулирование скорости АД при использовании некоторых рассмотренных способов сопровождается выделением в цепи ротора потерь мощности ΔР2 = Мω0s, что значительно снижает экономические показатели асинхронного ЭП.
Первые схемы, в которых полезно использовалась энергия потерь, создавалась путем специального соединения АД с другими электрическими машинами. Поэтому эти схемы получили название каскадных: "В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называют каскадными.
В общем случае каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию потерь в роторе.

Рис. 5.31. Схемы электромеханического (а) и электрического (б) вентильно-машинных каскадов
По способу использования этой энергии различают схемы электромеханического машинно-вентильного каскада и электрического каскада.
В электромеханическом машинно-вентильном каскаде (рис. 5.31, а) обмотка ротора АД 2, приводящего в движение рабочую машину 1, подключается к трехфазному неуправляемому выпрямителю 4, собранному на полупроводниковых вентилях. К выводам выпрямителя присоединен якорь вспомогательной машины 3 постоянного тока, ЭДС которой Ев м направлена навстречу ЭДС выпрямителя Ев. АД 2 и машина 3 соединены одним валом..
Если пренебречь потерями в схеме, то можно установить, что рабочей машине 1 передается вся электромагнитная мощность Рэм. Действительно, на вал от АД 2 поступает мощность Р2= Мω, от вспомогательной машины 3— мощность РВ М= ΔР2= = Мω0s, в результате суммарная механическая мощность на валу рабочей машины РР М= Р2+ Рв м= Мω + Мω0s= Мω0= Рэм.
В электрическом каскаде (рис. 5.31,6) в отличие от электромеханического вспомогательная машина 3 не имеет механической связи с АД 2, а соединена одним валом с синхронным генератором 5, подключенным к сети переменного тока. За счет этого I, энергия потерь передается не на вал рабочей машины 1, а с помощью генератора 5 отдается в сеть, а рабочей машине передается только механическая мощность Р2= Мω.
Рассмотрим регулирование скорости в каскадных схемах, которое происходит за счет изменения ЭДС Евмвспомогательной машины 3 за счет воздействия на ток возбужденияIВэтой машины.
Предположим, что при работе ЭП в установившемся режиме происходит увеличение тока возбуждения IВ. Это повлечет за собой увеличение ЭДС Евми вследствие этого уменьшение выпрямленного. токаId, который определяется выражением
Id= (Ев–Ев м)/R∑, (5.35)
где R∑, — суммарное активное сопротивление цепи выпрямленного тока; Ев— ЭДС выпрямителя 4.
Уменьшение Idи тем самым тока ротора АД 2 вызовет снижение его момента, который станет меньше момента нагрузки Мс, создаваемого рабочей машиной 1. В результате скорость двигателя начнет снижаться, а его скольжение и ЭДС роторной обмотки Е2= Е2кsначнут возрастать. Увеличение ЭДС ротора приведет к увеличению тока ротора и тем самым момента АД, который вновь станет равным моменту нагрузки, и скорость АД перестанет изменяться. Двигатель опять будет работать в установившемся режиме, но уже при более низкой скорости. В случае уменьшения токаIвскорость АД будет возрастать.
Из механических характеристик электромеханического каскада для разных значений токов Iв(рис. 5.32, а) видно, что максимальный, момент по мере снижения скорости каскада возрастает, поскольку по мере увеличения тока возбуждения вспомогательной машины ее момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при I разных токах возбуждения вспомогательной машины 1 примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности.

Рис. 5.32. Механические характеристики электромеханического (а) и электрического (в) каскадов: 1—4—соответственно при Iв = 0; 0,2; 0,4
При токе возбуждения вспомогательной машины, близком к нулю, механическая характеристика (рис. 5.32, б) электрического каскада близка к естественной характеристике АД. По мере увеличения тока возбуждения искусственные характеристики 2—4 располагаются ниже естественной 1, причем номинальному току возбуждения Iв ном соответствует самая низкая характеристика. Максимальный момент каскада, определяемый только АД 2 (см. рис. 5.31), сохраняется на разных характеристиках примерно постоянным. Поэтому электрический каскад называют каскадом постоянного момента.
В настоящее время в связи с широким распространением силовых тиристорных преобразователей появилась возможность заменять ими электромашинные вращающиеся преобразователи. В частности, электромашинный агрегат 3—5 (см. рис. 5.31,6) представляет собой преобразователь энергии постоянного тока, поступающей от выпрямителя 4, в энергию переменного тока, отдаваемую в сеть. Такой машинный агрегат может быть заменен на статический преобразователь "частоты, состоящий из трансформатора 2 и инвертора 3 (рис. 5:33). К обмотке ротора АД 1 подключен неуправляемый выпрямитель 5 и инвертор 3, а также реактор 4, который служит для сглаживания пульсаций выпрямленного тока. Асинхронный ЭП по схеме рис. 5.33 получил название асинхронного вентильного каскада.
Инвертор, представляет собой преобразователь энергии постоянного тока в энергию переменного тока. Электродвижущую силу инвертора можно регулировать аналогично тому, как регулируется ЭДС машины постоянного тока. Поэтому механические характеристики асинхронного вентильного каскада аналогичны характеристикам вентильно-машинного электрического каскада.
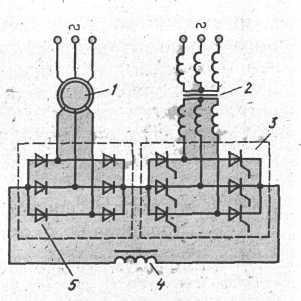
Рис 5.33. Схема асинхронного винительного каскада
Существует много схем асинхронных вентильных каскадов, аналогичных рассмотренной. Эти схемы несколько отличаются по своей сложности, техническим возможностям регулирования скорости, энергетическим показателям и т. д: Однако принцип действия и назначение этих схем аналогичны: использование энергии скольжения для .совершения, полезной работы и возможность плавного регулирования скорости АД.
Отметим основные показатели регулирования скорости АД в каскадных схемах включения.
Практический диапазон регулирования скорости в каскадных схемах обычно не превышает двух. Вызвано это тем обстоятельством, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать установленную мощность всех устройств в его роторной цепи. Так, при диапазоне регулирования. равным двум установленная мощность машинно-вентильного электрического каскада составляет 250% номинальной мощности АД, из них основной АД —100%, выпрямитель, вспомогательная машина и синхронный генератор —по 50%.
Плавность регулирования скорости АД в каскадных схемах высокая и определяется плавностью изменения ЭДС вспомогательной машины или ПЧ. Регулирование скорости производится вниз от естественной характеристики, а некоторые специальные каскадные схемы обеспечивают и двухзонное регулирование скорости.
Несмотря на значительные капитальные затраты при реализации данного способа регулирования скорости, применение каскадных схем за счет полезного использования энергии скольжения оказываются экономически целесообразным для мощных асинхронных ЭП с небольшим (не более 2—3) диапазоном регулирования скорости. К ним относятся ЭП мощных вентиляторов, центробежных насосов, компрессоров, воздуходувок, испытательных установок.