

32
дает α(1) = 5/16. Тогда
x(2) =[-1/8; 0] T – 5/16 [1/5; 2/5] T = [-3/16; -1/8] T,
что совпадает с решением, полученным в предыдущем примере.
2.3. Решение задачи нахождения условного экстремума
Предыдущий раздел курсовой работы был посвящен изучению методов -ре шения задачи безусловной оптимизации, то есть задачи, в которой не наклады-
вается никаких ограничений на пространство переменных. В инженерной практике такие задачи встречаются чрезвычайно редко, однако рассмотренные выше процедуры используются в качестве инструментария для решения более сложных оптимизационных задач, в которых область поиска ограничена из ка-
ких-либо практических соображений. Существует большое число методов чис-
ленного решения подобных задач, основанных на преобразовании исходной за-
дачи. Ниже будет рассмотрен наиболее распространенный из -нихметод штрафных функций.
2.3.1. Метод штрафных функций
Суть метода заключается в преобразовании исходной целевой функции -по средством включения в нее функции от ограничений, получая таким образом за-
дачу безусловной оптимизации, для решения которой можно использовать рас-
смотренные в первой части методы. Похожее преобразование целевой функции встречается в задачах нелинейного программирования при конструировании функции Лагранжа, однако непосредственно искать экстремум этой функции нельзя, поскольку решение преобразованной задачи находится в узловой точке.
Поэтому переход от задачи условной оптимизации к задаче безусловной опти-
мизации осуществляют посредством включения в целевую функцию''штрафов"
за нарушение ограничений задачи.
Пусть исходная задача имеет следующий вид
min f(x), xÎ RN
при ограничениях
33
gj(x) ≥ 0, j = 1, …, J,
hk(x) = 0, k = 1, …, K.
Тогда преобразованная задача определится выражением
P(x, R) = f(x) + Ω(R, g(x), h(x)),
где Ω - штрафная функция от ограничений задачи, а R - штрафной параметр. На-
личие штрафного параметраR вызвано тем, что введение штрафной функции сильно деформирует поверхность целевой функции, что, в свою очередь, приво-
дит к ухудшению обусловленности преобразованной задачи. Поэтому параметр
R служит "регулятором" веса штрафной составляющей в целевой функции, и
процесс решения задачи разбивается на ряд вспомогательных задач с различны-
ми значениями параметра R и контролем сходимости их решений.
2.3.2. Виды штрафов
Наиболее распространенными видами штрафов являются: квадратичный; ло-
гарифмический; штраф, заданный обратной функцией и штраф типа квадрата срезки. Выбор типа штрафа определяется характером ограничений и порождает,
в свою очередь, проблему удержания рабочей точки внутри области допустимых значений штрафной функции (внутренняя рабочая точка) либо вне ее (внешняя рабочая точка).
Квадратичный штраф
Этот вид штрафа используется для учета ограничений-равенств и имеет вид:
Ω = R{h(x)}2.
Значение штрафа резко возрастает при отклоненииh(х) от нуля. Несмотря на увеличение параметра R, стационарная точка штрафной функцииP(x,R) стремится к х*, так как в пределеh(x(t)) = 0, где t - номер итерации: t = 1, 2, …, Т.
Функция Ω непрерывна и имеет непрерывную производную, откуда следует, что если непрерывны и дифференцируемы f(x) и h(х), то стационарную точку можно найти аналитически.
34
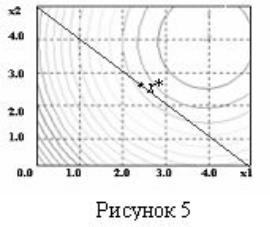
ПРИМЕР 8 Пусть требуется минимизировать
f(x) = (x1 - 4)2 + (x2 - 4)2
при ограничениях
h(x) = x1 + x2 - 5 = 0.
Графически решение задачи представлено на рис.5.
Преобразуем задачу, вводя квадратичный штраф
P(x, R) = (x1 - 4)2 + (x2 - 4)2 + (1/R)( x1 + x2 - 5)2.
Так как f(x) и h(x) просты, то экстремум P(x, R) находим аналитически:
¶P |
|
= 2( x |
- 4) + |
2 |
( x |
1 |
+ x |
2 |
- 5) = 0 ; |
||
|
|
|
|||||||||
1 |
|
R |
|
|
|||||||
¶x1 |
|
|
|
|
|
||||||
¶P |
= 2( x2 |
- 4) + |
2 |
( x1 + x2 - 5) = 0 , |
|||||||
|
|
||||||||||
¶x2 |
|
|
R |
|
|
|
|
||||
и совместное решение дает
x1 = x 2 |
= |
10 + 8 R |
. |
|
|||
|
|
4 + 2 R |
|
Устремляя R к 0, получим х* = [2.5 2.5]T и f(x*) = 4.5.
Обсудим проблемы численных подходов к решению задачи. Из решения
x1 = x2 |
= |
10 + 8 R |
|
4 + 2 R |
|||
|
|
35
следует, что при вариации R от 0 до достаточно больших значений решение за-
дачи будет изменяться от x1= x2= 10/4= 2.5 до x1=x2=4 (решение задачи без учета ограничений). Таким образом, увеличивая штрафной параметр R, мы уменьшаем
"вес" ограничения в целевой функции Р(х, R). Итак, зафиксировав значение R и
воспользовавшись одной из рассмотренных в первой части процедур численного нахождения экстремума, мы найдем приближенное решение х(0), где верхний ин-
декс означает номер вариации R(0). Выбирая далее R(t) из условия: R(0) > R(1) > R(2) > … > R(t), мы получим приближения х(1), x(2), … , х(t) к х*. Справедлив вопрос, а
нельзя ли сразу принять R = 0 или близкое к нулю значение и найти решение за-
дачи. Во-первых, R выполняет роль весового коэффициента, регулирующего значимость ограничения в составе преобразованной целевой функции. С умень-
шением R стационарная точка функции P(x,R) смещается в сторону более точно-
го выполнения ограниченияh(x)= 0. Во-вторых, с изменением R существенно возрастает крутизна "склонов" поверхности функции вблизи стационарной точ-
ки, что существенно затрудняет работу алгоритмов безусловной оптимизации.
Это и обуславливает итеративность процесса, когда новая итерация начинается из точки, более близкой к точкех* с начальным шагом, не превышающим ко-
нечного значения шага поиска на предыдущее итерации.
Прочие виды штрафов
Рассматриваемые ниже виды штрафов используются, в основном, для огра-
ничений-неравенств g(x).
Логарифмический штраф имеет вид
Ω = -R . ln[g(x)].
Этот штраф положителен для всехх, таких, что 0<g(х)<1, и отрицателен при g(х)>1. Логарифмический штраф - это барьерная функция, не определенная в точках, где g(x)<0. Поэтому на начальном этапе поиска, когда значение шага по-
иска велико, необходимо обеспечить защиту процедуры от попадания рабочей точки в недопустимую область.