Статические нагрузки двухконцевых лебёдок
Одноконцевые лебёдки являются не уравновешенными механизмами. При подъёме такой механизм, кроме груза, поднимает канаты, грузозахватывающее устройство; при опускании тормозят канаты и др.. То есть механизм дополнительно потребляет энергию, увеличивается мощность электрооборудования и эксплуатационные затраты.
Пример:
Рис.1
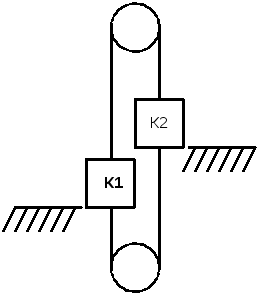 Если
число уровней больше 2 (лифты пассажирские),
то вместо второй кабины навешивают
балластный контргруз(противовес).
Если
число уровней больше 2 (лифты пассажирские),
то вместо второй кабины навешивают
балластный контргруз(противовес).
Таким образом :
![]()
![]() (1)
(1)
α- коэффициент уравновешивания.
Пример - лифтовая лебёдка с червячным редуктором и канатоведущим шкивом(рис.2). .
Кинематическая схема
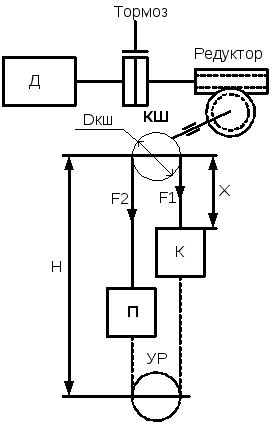
КШ - канатоведущий шкив
ПР – противовес
К – кабина
УК – уравновешивающие канаты
Результирующее усилие на КШ определяется разностью натяжений подъёмных канатов F1(кабины) и F2(противовеса).
F=F1-F2 (2)
С учётом сил трения Fтр1, Fтр2 в направляющих кабины, а так же весов канатов с погонного метра qк соотношение (2) примет вид:
F

 =G0+G+qkX-G0-αGH-qk(H-X)±
Fтр1
Fтр2
=G0+G+qkX-G0-αGH-qk(H-X)±
Fтр1
Fтр2
F=G+qk(2X-H)- αGH±Fтр (3) – сила
сопротивления, приведённая к валу двигателя.
Усилие на валу состоит из веса активного груза и реактивной составляющей силы трения.
На валу они могут создавать активный и реактивный моменты:
![]() (4)
(4)
iр – передаточное число редуктора.
Таким образом, Мс зависит от:
α – коэффициента уравновешивания;
Н – высоты подъёма;
G – загрузки кабины.
Если высота подъёма не велика или используются уравновешивающие канаты, то составляющей (2X-Н) можно пренебречь:
![]() (5)
(5)
Режимы работы:
![]()
Подъём пустого грузозахватывающего устройства G=0:
![]() (6)
(6)
Подъём номинального груза G=GH:
![]()
![]() (7)
(7)
Спуск пустого грузозахватывающего устройства G=0:
![]() (8)
(8)
4) Спуск номинального груза G=GH:
![]() (9)
(9)
Влияние α на требуемую мощность оценим с помощью среднеквадратичного метода. Для этого зададимся циклом работы, при этом лебёдка поднимает вес Gн за время tп и спускается пустая за время tc, причём tп = tc:
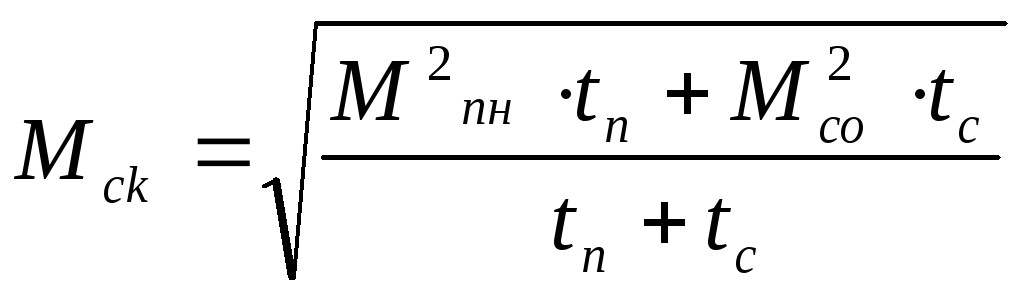
или подставляя (7) и (8) получим:
![]() (10)
(10)
Среднестатистические αопт=0,4-0,6, таким образом:
Т.е. его введение уменьшает мощность двигателя в 1,4 раза.
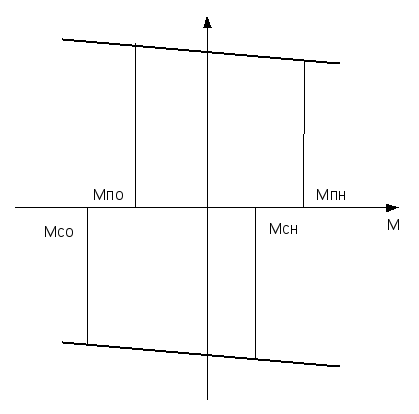
Нагрузки симметричны относительно начала координат:
Математическое описание идеальных звеньев, реальных звеньев 1-го и 2-го порядка.
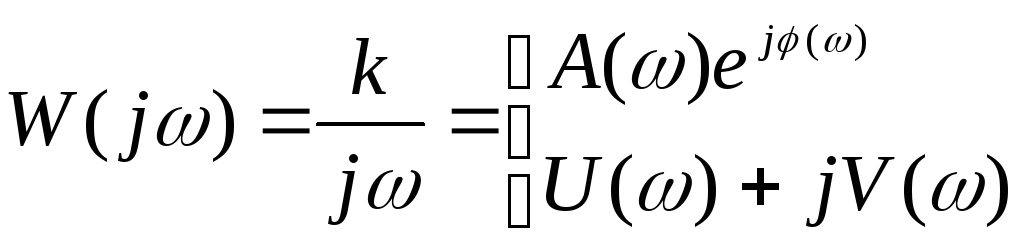
И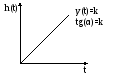 нтегрирующее
звено:
нтегрирующее
звено:
Передаточная функция:
![]()
![]()
![]()
![]()
Амплитудно-фазовая характеристика:
![]()
![]()

![]()
ω


![]()
![]()


h(t)
100
10
2
1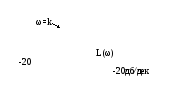





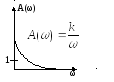
Дифференцирующее звено:
П
A(ω)
 ередаточная
функция:
ередаточная
функция:![]()
![]()
ω t![]()




![]()

![]()
ω

![]()
20дб/дек
![]()
![]()


![]()


Форсирующее звено 1-го порядка:
Передаточная функция:
![]()
h(t) t![]()



A(ω)
ω![]()
![]()
![]()





![]()
![]()
![]()
ω


![]()




20lgk



ωc
![]()
Два случая:
ω<ωс
ω
 >ωс
>ωс

![]()



![]()



![]()
ωс

Инерционное звено 2-го порядка:
Передаточная функция:
![]()
![]() –собственная частота
звена второго порядка.
–собственная частота
звена второго порядка.
![]() –параметр затухания.
–параметр затухания.
![]() <1
– колебательное звено.
<1
– колебательное звено.
![]() –апериодическое звено.
–апериодическое звено.
![]() =0
консервативное звено.
=0
консервативное звено.
![]()
![]()
![]()
![]()


![]()
h(t)![]()
![]()

B2
B1 k![]()










![]()




![]()
![]()
T![]()

![]()
![]()
![]()
t![]()

![]()

Методы предварительного выбора двигателей механизмов ОПН.
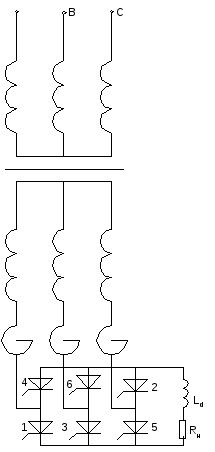
Изобразить внешний вид регулировочных характеристик Ud=f(α) трёхфазного управляемого мостового выпрямителя для случая, когда Lн=0 и Lн→∞. Привести математические выражения, описывающие эти выражения.
Методы предварительного выбора двигателей для механизмов ОПН
Выбор мощности двигателя производится методом средних потерь и эквивалентных величин (I,M,P), носят поверочный характер. Число поверочных расчётов зависит от точности выбора запаса на динамические нагрузки. Особенностью выбора для типовых механизмов является то, что динамические нагрузки известны и число поверочных расчётов можно уменьшить. При выборе мощности здесь все ОПМ делятся на 3 группы:
когда цикл работы задан и известно, что динамические нагрузки незначительны;
когда цикл работы задан и известно, что динамические нагрузки существенны существенно влияют на нагрев двигателя;
цикл работы механизма заданием не определён.
1-я группа: характерна
для механизмов с малыми инерционными
массами и малыми частотами включения
в час – одноконцевые лебёдки(![]() )
)
Должно быть дано: Мс=f(t) – нагрузочная диаграмма механизма, ωр – рабочая скорость, ξдоп – допустимое ускорение.
Для двигателя повторно-кратковременного режима работы нужно:
Момент средний эквивалентный:
![]()
-делим только на рабочее время, если выбран двигатель для продолжительного режима, то делим на Тц.
2)
 3)
Перейдём к ПВк(каталажному):
3)
Перейдём к ПВк(каталажному):
![]()
Требуемая мощность:
![]()
Кд = (1,1-1,5) – коэффициент динамических нагрузок.
2-я группа: с большими инерционными массами(механизмы перемещения, поворота, двухконцевые лебёдки). Могут быть и механизмы с малыми инерционными массами, но с большим числом включения в час.
Должно быть дано: Мс=f(t), ωр, ξдоп, φр – рабочий угол, число включений в час.
Рассчитывается нагрузочная диаграмма двигателя
![]()
![]()
Муст=Мс, Jдв берётся Jдв аналогичных механизмов.
2) Учитываем время пуска и время торможения, считая, что tп = tt= ωp/ ξдоп
3) Считаем время поворота для переходного режима: φпуск = φторм = ωр∙tп,т/2
4) Рассчитываем параметры установившегося значения: φуст = φр-φп-φт
tуст = φуст/ωр; tц =3600/N; N – число включений в час.
5)
![]()
6)
 - для двигателей повторно-кратковременного
режима.
- для двигателей повторно-кратковременного
режима.
7)
![]() ;
;![]()
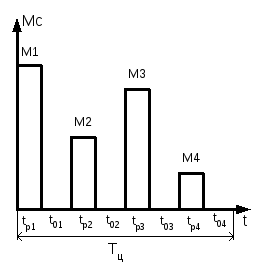
3-я группа: для механизмов кранов не большой грузоподъёмности.
Должно быть дано: условный режим работы: Мmax при tр1, Mmin при tp2, при чём tр1= tр2
![]() - двигателей
повторно-кратковременного режима.
- двигателей
повторно-кратковременного режима.
ПВ для этих механизмов определяются из среднестатистических значений.
|
Режим работы |
Ср. допуска использования механизма. |
ПВ,% |
Среднее число вкл. в час. |
Темпер. окр. среды. | ||
|
По грузоподъёму |
По времени | |||||
|
В теч. года |
В теч. суток | |||||
|
Лёгкий |
0,25-1 |
Не регулярная, редкая. |
15-25 |
До 60 |
25 | |
|
Средний |
0,75 |
0,5 |
0,33 |
25-40 |
60-120 |
25 |
|
Тяжёлый |
0,75-1 |
1 |
0,6 |
40 |
120-240 |
40 |
|
Весьма тяж. |
1 |
1 |
1 |
60 |
300-600 |
45 |