

Казарезов Проеектування пристроiв и систем пiдводных апаратiв
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ Український державний морський технічний університет імені адмірала Макарова
А. Я. Казарєзов, А. Ф. Галь, С. М. Пишнєв
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Частина І
Рекомендовано Міністерством освіти і науки України як навчальний посібник для студентів вищих навчальних закладів
Миколаїв
НУК
2005

УДК 629.584 ББК 39.4
К 14
Рекомендовано Міністерством освіти і науки України як навчальний посібник, лист № 14/18.2–69 від 21.04.04.
Рецензенти:
Б.А. Бугаєнко, доктор технічних наук, професор; В.О. Некрасов, доктор технічних наук, професор; Ю.Д. Жуков, доктор технічних наук, професор
|
Казарєзов А. Я., Галь А. Ф., Пишнєв С. М. |
К 14 |
Проектування пристроїв і систем підводних апаратів: |
Е |
Навчальний посібник. – Миколаїв: НУК, 2005. – Ч. I. – 164 с. |
ISBN 966–321–030–3 |
|
У посібнику подані класифікація та особливості застосування загальносуднових, спеціальних систем і пристроїв підводних апаратів, наведені відомості про їх конструкцію, елементну базу, принципи дії, застосовувані матеріали.
Посібник призначений для використання в курсах навчальних дисциплін "Океанотехніка", "Проектування підводних рятувальних систем", "Спеціальні пристрої і системи океанотехніки", "Проектування і конструювання підводних апаратів", а також у курсовому
ідипломному проектуванні за фахом "Кораблі та океанотехніка". Посібник може бути використаний студентами, магістрами й аспірантами кораблебудівного факультету, працівниками проектних організацій, суднобудівних підприємств як навчально-практичний
ідовідковий.
|
УДК 629.584 |
|
ББК 39.4 |
ISBN 966–321–030–3 |
© Казарєзов А.Я., Галь А.Ф., |
|
Пишнєв С.М., 2005 |
|
© Видавництво НУК, 2005 |
2

ВСТУП
Проектування і будівництво підводних апаратів (ПА) за останні 30 років стало важливим напрямком підводного кораблебудування, яке ввібрало в себе передовий досвід створення техніки освоєння океанських глибин. Термінологічне поняття "підводні апарати" охоплює досить великий перелік технічних засобів освоєння океану, різних за своїми розмірами, будовою і призначенням. Це підводні технологічні платформи, робочі і рятувальні підводні мінічовни, дослідницькі населені ПА [30–33], ненаселені телекеровані ПА (НПА) [17, 25] і роботи.
Поява нових типів підводних апаратів, нових матеріалів і технологій, розширення сфери їхнього застосування й аналіз накопиченого досвіду експлуатації дають великий матеріал для розробки та вдосконалення методик їхнього проектування [36, 37]. Насиченість підводних апаратів різними технічними пристроями і системами робить необхідним залучення найсучасніших методологічних підходів до вибору й обґрунтування характеристик основних систем і пристроїв, що займають істотне місце у ваговому навантаженні ПА і формують його архітектурний вигляд.
Узалежності від типу ПА – населений чи ненаселений – перелік його систем і пристроїв істотно розрізняється. Максимально насичені технічними засобами населені дослідницькі апарати і робочі підводні човни. Для ненаселених телекерованих апаратів пріоритетними є спеціальні системи і технологічне устаткування при мінімальному використанні загальносуднових пристроїв і систем.
Посібник є результатом аналізу досвіду проектування пристроїв і систем для ПА різного призначення.
Упосібнику містяться відомості про елементну базу систем і пристроїв підводно-технічного призначення, способи забезпечення
ірегулювання плавучості ПА.
3

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Розділ 1. ЗАГАЛЬНА ХАРАКТЕРИСТИКА СИСТЕМ
ІПРИСТРОЇВ ПІДВОДНИХ АПАРАТІВ
1.1.Класифікація систем і пристроїв
Системи і пристрої підводних апаратів призначені для забезпе-
чення мореплавних якостей апаратів при надводному і підводному плаванні, збереження живучості і непотоплюваності ПА, життєдіяльності екіпажу, проведення вантажних і рятувальних операцій, експлуатації головних і допоміжних механізмів, енергетичних установок та устаткування ПА.
Системами підводного апарата називають сполучену з корпусом ПА сукупність місткостей, силових елементів (наприклад, у вигляді насосів і компресорів), трубопроводів, електрокабелів, запірної, регулюючої, комутаційної арматури і контрольно-вимірю- вальних приладів (температури, швидкості, тиску та ін.), об'єднаних у певній послідовності для виконання заданих функцій.
Системи забезпечують передачу до об'єктів споживання електроенергії, пари або робочої рідини (води, бензину, мастила, рідкого палива, повітря), газів, а також різних газових сумішей для функціонування механізмів, пристроїв, забезпечення життєдіяльності екіпажу і пасажирів.
Пристроями підводних апаратів називають компактну сукупність механізмів і конструкцій, об'єднаних функціональним призначенням.
4

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Системи і пристрої ПА класифікують за призначенням на загальносуднові і спеціальні, основні і допоміжні. Конструктивно можуть бути виділені прості, що складаються з 3–5 елементів, і складні, які містять десятки і сотні окремих елементів.
До загальносуднових відносять усі системи і пристрої, що забезпечують функціонування ПА як інженерної плавучої споруди з певними мореплавними якостями, до спеціальних – ті, які забезпечують виконання основних і допоміжних технологічних функцій (пошук і огляд об'єктів, навігацію ПА, ремонтні і рятувальні роботи).
Перелік основних і допоміжних систем і пристроїв ПА визначається індивідуально, у залежності від його призначення. Він може містити в собі системи і пристрої як загальносуднового, так і спеціального призначення [9].
До загальносуднових систем ПА відносяться:
головна баластна система, що забезпечує апарату стан позитивної чи негативної плавучості;
зрівняльно-замісна система, що забезпечує тонке регулювання стану плавучості ПА;
крено-диферентна, що забезпечує задані значення крену і диференту ПА;
система енергоживлення, що забезпечує енергією головні і допоміжні механізми ПА;
система керування, що забезпечує контроль і керування всім устаткуванням ПА в ручному чи автоматичному режимі;
аварійна система, що забезпечує сплиття і виявлення ПА при розгерметизації міцного корпусу, пожежі та в інших аварійних ситуаціях;
системи стиснутого повітря (високого і низького тиску); система водопостачання, що забезпечує побутові і життєві по-
треби екіпажу; система пожежогасіння;
система внутрішнього освітлення; система видалення продуктів життєдіяльності екіпажу (стічно-
фанова); система вентиляції і регенерації повітря;
система мікрокліматування відсіків.
Пристроями загальносуднового призначення ПА є:
5

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
підрулюючий, що забезпечує рух і маневрування ПА; рульовий, що забезпечує керування вертикальними і горизон-
тальними рулями; якірно-швартовний, що забезпечує постановку на якорі, швар-
товні операції; буксирний, що забезпечує буксирні операції;
спуско-піднімальний, що забезпечує підйом, спуск і зберігання по-похідному ПА [6];
конструктивного захисту, що забезпечує цілісність ПА в процесі експлуатації.
До спеціальних систем ПА відносяться системи зовнішньої (забортної) комутації; зовнішнього освітлення; навігації; телевізійна; звукопідводного зв'язку; позиціюваня ПА біля об'єкта.
Усі перераховані системи можуть включати до свого складу ряд підсистем дублюючого призначення, які живляться від різних джерел енергії, що підвищує надійність системи в цілому.
Перелік спеціальних пристроїв ПА практично необмежений. Найбільш застосовувані з них маніпуляторний; скидання буїв-мар- керів; висування щупа, антени та інших елементів технологічного устаткування; пошукові і навігаційні гідролокатори; далекоміри; дефектоскопи; спеціальні захоплювачі і пробовідбірники; датчики фізичних і хімічних параметрів води і ґрунту; бурові верстати; пастки для біологічних об'єктів.
Пристрої ПА часто сполучаються з конструкційно-насиченими елементами корпусних конструкцій і утворюють конструктивнофункціональний модуль.
Системи підводних апаратів за функціонально-енергетичним принципом також іноді поділяють на силові; системи підтримання рівноваги (стабілізації); системи, що забезпечують населеність [11, 14–16].
До складу силових систем підводних апаратів входять системи: електроживлення – для забезпечення споживачів електро-
енергією; гідравліки – для забезпечення всіх споживачів енергією стисну-
того мастила; повітря високого тиску – для продування баластових цистерн,
пуску двигунів і подачі іншим споживачам.
6

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
До складу систем підтримання рівноваги (стабілізації) підводних апаратів входять системи:
головного баласту, що включає підсистеми рідкого баласту (для приймання води у баластні цистерни під час занурення і видалення води під час сплиття); твердого баласту (для аварійного і регульованого скидання твердого баласту); зрівняльно-замісну (для компенсації надлишкової плавучості);
крено-диферентна – для вирівнювання чи створення крену і диференту ПА.
До складу систем підводних апаратів, що забезпечують населеність, входять системи:
регенерації і кондиціонування повітря; вентиляції – для створення необхідного обміну повітря в при-
міщеннях підводного апарата при його надводному положенні; водопостачання – для збереження і подачі питної, а також
холодної і гарячої води для миття; санітарно-побутова (фанова) – для видалення нечистот з галь-
юна і стічна для видалення стічних вод від умивальників, мийок і душу;
опалення – для опалення житлових і службових приміщень підводного апарата;
камбузна – для готування їжі і підігрівання води; освітлення – для створення штучного освітлення всередині при-
міщень ПА.
До складу загальносуднових систем ПА може входити цілий ряд допоміжних підсистем. Наприклад, до складу систем, що забезпечують роботу енергетичної установки підводних апаратів, входять підсистеми:
паливна – для приймання рідкого палива у витратні і запасні цистерни і подачі палива від витратних цистерн до двигунів внутрішнього згоряння (ДВЗ);
мастильна – для приймання, збереження і подачі мастила до підшипників головних і допоміжних механізмів;
охолодної рідини – для подачі води для охолодження двигунів, допоміжних механізмів і теплообмінних апаратів;
вихлопних газів – для відведення відпрацьованих газів від ДВЗ; газовідвідна – для відведення газів з паливних і акумуляторних
відсіків.
7
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
1.2. Визначення маси й об'єму загальносуднових систем і пристроїв підводних апаратів у першому наближенні
Маса й об'єм загальносуднових систем підводних апаратів. Маса загальносуднових систем підводного апарата в першому наближенні може бути визначена за формулою
mc = AcDн кг,
де Ас – вимірник маси загальносуднових систем підводного апарата; Dн – нормальна водотоннажність апарата, кг. Для оціночних розрахунків рекомендується Ас = 0,06...0,11.
Об'єм загальносуднових систем
Vc = AρcDн м3,
с
де ρ с – щільність загальносуднових систем, кг/м3. Для практичних розрахунків рекомендуєтьсяρ с = 3 103 кг/м3.
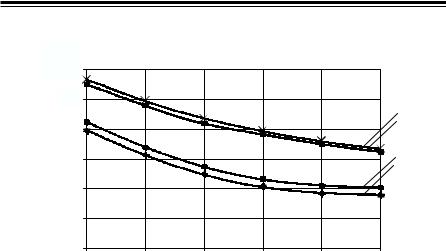
Залежність коефіцієнта Ас від маси підводного апарата подана на рис. 1.1 [11].
Маса й об'єм пристроїв підводних апаратів. Для оцінки маси пристроїв підводного апарата рекомендується формула
mп = AпDн кг,
де Ап – вимірник маси загальносуднових пристроїв підводного апарата; Dн– нормальна водотоннажність апарата, кг. Для оціночних розрахунків рекомендується Aп = 0,03...0,07.
Об'єм загальносуднових пристроїв
Vп = AρпDп м3 ,
п
деρ п – щільність загальносуднових пристроїв, кг/м3. Для практичних розрахунків рекомендується ρ п = 3,2 103 кг/м3.
8
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Залежність коефіцієнта Ап від водотоннажності підводного апарата подана на рис. 1.1 [11].
AАп,,AАc, |
с |
|
|
п |
|
|
|
Bп,Bc |
|
|
|
Вп, Вс |
|
||
|
0,1 |
|
|
0, 10 |
1 |
||
|
0,08 |
2 |
|
|
|
||
|
0,06 |
3 |
|
|
4 |
||
|
|
|
|
|
0,04 |
|
|
0,02
0
10 |
20 |
30 |
40 |
н |
D , т |
||||
|
|
|
|
н |
Рис. 1.1. Графіки залежностей коефіцієнтів Ас, Ап, Вс, Ап від нормальної водотоннажності підводного апарата Dн:
1 – Bс; 2 – Aс; 3 – Bп; 4 – Aп
Для оцінки очікуваних маси й об'єму пристроїв ПА на ранніх стадіях проектування можливе використання статистичних залежностей. Для дослідницьких ПА маса загальносуднових пристроїв підводних апаратів становить 5...8 % від нормальної водотоннажності [11]. Для вибірки з 20 апаратів, характеристики яких наведені в [11], ця величина становить в середньому 6,45 %. На масу загальносуднових систем підводних апаратів припадає 6...11 % від водотоннажності апарата, для згаданої вище вибірки – 8,4 %. На більш пізніх стадіях проектування, при відомих характеристиках основного (міцного) корпусу підводного апарата, рекомендуються такі наближені формули [11]:
маса пристроїв апарата
mп = Aп mм.к (dм2.к Lм.к + Bп v3 ) кг,
де Ап, Вп – коефіцієнти, що залежать від конструкції пристроїв [11] (див. рис. 1.1); mм.к – маса міцного корпусу, кг; v – швидкість руху апарата, м/с; dм.к – діаметр основного (міцного) корпусу підвод-
9

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
ного апарата, м; Lм.к – довжина основного (міцного) корпусу підводного апарата, м;
маса систем апарата
mс = Aс mм.к (dм2.к Lм.к + Bс Hр ) кг,
де Нр – робоча глибина занурення, м; Ас, Вс – коефіцієнти, що залежать від конструкції пристроїв (див. рис. 1.1) [11].