

11. Сравнение методов минимизация логических функций.
Метод Вейча-Карно позволяет минимизировать функции с четырьмя и менее аргументами, если же их больше, то используется метод Квайна-МакКласки.
Метод свертки таблицы истинности более трудоемкий, однако он имеет преимущества перед двумя предыдущими методами минимизации логических функций:
1. не ограничен формой представления функции (не обязательно ДНФ),
2. дает более минимальные результаты,
3. может работать с не полностью определенными таблицами истинности, где для некоторых значений аргументов значение функции не определено или безразлично.
12. Автоматическое управление движением с помощью конечных выключателей, пример.
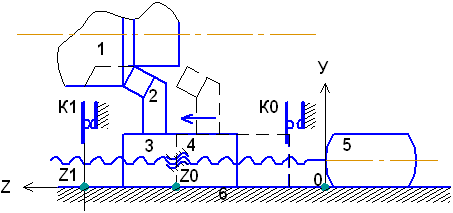
Рассмотрим простой, но распространенный на производстве пример, показанный на схеме рис.1. Заготовка 1 протачивается резцом 2, закрепленном на суппорте 3, который перемещается влево с помощью электродвигателя 5 через механическую передачу винт-гайка 4. Все установлено на неподвижном основании 6. Требуется остановить движение суппорта в точке Z1 для чего нужно выключить электродвигатель. Положение суппорта определяется его левым краем. Конечно, это может сделать токарь вручную, перемещая суппорт штурвалом и наблюдая за его движением по делениям на шкале лимба. Но если это нужно делать очень часто, то целесообразно выключать электродвигатель автоматически с помощью конечного выключателя К1. В простейшем случае – это размыкающий электрический контакт, который разрывает электрическую цепь питания электродвигателя от прикосновения суппорта (суппорт упирается в левую упругую пластинку и отводит ее от неподвижной правой пластинки). Поскольку электродвигатель подключен к трехфазной сети напряжением 220/380 В и потребляет десятки ампер, то контакт К1 сначала отключает пускатель, который в свою очередь отключает электродвигатель. Так как пространство, где происходит резание материала, очень загрязнено (смазывающе-охлаждающая жидкость, стружка), для повышения надежности работы в настоящее время обычно применяют бесконтактные конечные выключатели, работающие, например, на магнитном принципе.
13. Цикловая схема управления производственным механизмом, пример.
Последовательность сигналов и движений механизма при его автоматической работе представлена на рис.5. В исходном положении для нашего примера включены конечные выключатели К1, К4, К7, всё остальное выключено. В качестве конечных и путевых переключателей (выключателей) используются бесконтактные выключатели типа БВК - 24, остальные элементы схемы управления контактные, их устанавливают в шкаф управления, где они работают достаточно надежно. Кнопка "Пуск" включает своим контактом П пускатель Е, включающий электродвигатель ME, начинается движение Е, стойка идёт вперёд. Пускатель Е может включиться только тогда, когда включен К1, так как его нормально открытый (замыкающий) контакт включен последовательно с П, рис.6. После этого кнопка П может разомкнуться (палец на нажатой кнопке держать не нужно), да и К1 также разомкнется, так как движение стойки вперед выведет флажок из К1. Чтобы при этом не отключился двигатель МЕ, пускатель Е включает свою катушку своим же контактом Е на самопитание (самоблокировку) через нормально замкнутый контакт КЗ для последующего отключения двигателя ME, но пока он включен. Самопитание показано на рис.5 дужкой со стрелкой. По достижении флажком путевого переключателя К2 он срабатывает и включает пускатель двигателя F, который также включается на самопитание, так как К2 вскоре отключается, поскольку дальнейшее движение стойки Е выводит флажок из К2. Движение каретки F вверх отключает К4 и продолжается до срабатывания К5, который отключает пускатель F (отключение обозначено чертой сверху на рис.5). На схеме управления (рис.6) это осуществляется размыканием нормально замкнутого контакта К5 в цепи самоудержания катушки F. Аналогично этому срабатывание КЗ отключает пускатель Е и движение Е (стойка вперед). Пускатель G включается только в том случае, когда сработают и КЗ, и К5, его отключение происходит при срабатывании К6, благодаря нормально замкнутому контакту К6 в цепи G, рис.6. Катушки всех пускателей включены через нормально замкнутые (размыкающие) контакты противоположных по направлению движения механизма пускателей с целью блокировки от междуфазного короткого замыкания при одновременном включении в случае неисправности схемы управления. Срабатывание К6, завершающее движение G (но час. стрелке), включает также нормально открытым (замыкающим) контактом пускатели -Е и -F, начиная оба эти движения одновременно. Движение -F завершается срабатыванием К4, нормально открытый контакт К4 при этом шунтирует нормально закрытый контакт К2 в цепи -Е, и последующее срабатывание К2 в этом случае не отключает -Е, это происходит при срабатывании К1. Нормально открытым контактом К1 включается пускатель -G, осуществляющий поворот стола против часовой стрелки до срабатывания К7, это завершает цикл работы.