

3. Упрощенный критерий оценки эвм, блок-схема «машины фон-Неймана», сравнение с Гарвардской архитектурой
Любой компьютер как универсальный инструмент для работы с информацией устроен очень просто. Все его части можно разделить на 3 вида: устройства обработки, хранения и обмена (ввода-вывода), причём последние могут осуществлять обмен данными как между компьютером и человеком, так и между другими компьютерами. С информационной точки зрения больше ничего там нет, хотя учитывая, что компьютер — устройство электрическое, ему нужен источник питания, кабели и т.п., но это общая часть всей электроники. При этом каждый элемент сам делится на компоненты вышеперечисленных трёх видов. Например, процессор относится к устройствам обработки, но внутри себя имеет блоки собственно вычислений, локальной памяти и обмена.
Процессор (за редкими исключениями) исполняет не программы, написанные на каком-нибудь языке программирования (один из которых, вы, возможно, даже знаете), а так называемый машинный код. Т.е. командами для него являются последовательности байтов, находящихся в памяти компьютера, не имеющие ничего общего не только с каким-то человеческим языком, но и с языком программирования высокого уровня. Каждая команда занимает до нескольких байт, в среднем — 3-5. Там же, в основной памяти (ОЗУ, RAM) находятся и данные. Они могут находиться в отдельной области, а могут и быть перемешаны с кодом. Различие между кодом и данными состоит в том, что данные — это то, над чем процессор производит операции. А код — это команды, которые ему сообщают, какую именно операцию он должен произвести. Одновременно в памяти располагаются множество программ, необходимых им данных и некоторое свободное место.
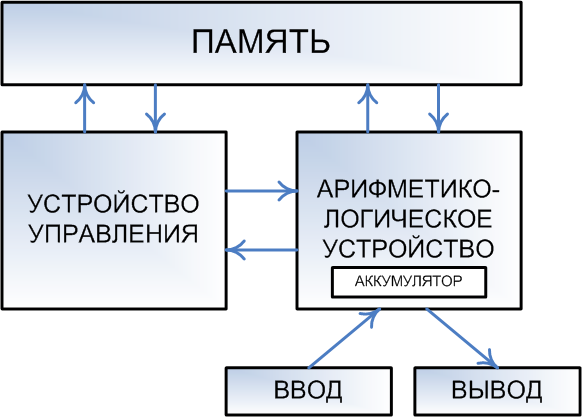
Блок-схема
«машины
фон Неймана»,
на
принципах которой построены все
x86-процессоры
Чтобы исполнить команду, процессор должен прочитать её из памяти. Чтобы произвести операцию над данными (а этого требует почти каждая команда), процессор должен прочитать их из памяти, и, возможно, после произведения над ними определённого действия, записать их обратно в память в обновлённом (изменённом) виде. Команды и данные идентифицируются их адресом, который представляет собой порядковый номер байта в памяти, с которого эти данные начинаются (если они занимают несколько байт).
У Гарвардской архитектуры два ОЗУ. Одно ОЗУ для данных, а второе для набора команд.
У машины фон Неймана одно ОЗУ для данных и команд.
4. Контроллер памяти, шина процессора
В этой схеме процессор обращается к «промежуточному» специализированному устройству, называемому контроллером памяти, а уже тот, в свою очередь — к микросхемам ОЗУ, размещенным на модулях памяти. Роль контроллера ОЗУ, таким образом, проста: он служит своего рода «мостом» между памятью и использующими её устройствами.
X86-система с внешним контроллером памяти (слева) и с контроллером памяти, встроенным в процессор (справа)
В традиционной схеме, контроллер памяти входит в состав чипсета — набора микросхем, являющегося основой системной платы. От быстродействия контроллера во многом зависит скорость обмена данными между процессором и памятью, это один из важнейших компонентов, влияющих на общую производительность компьютера. По «новой» схеме (к ней относятся процессоры Intel Core с буквой «i», и все ныне выпускаемые CPU AMD), контроллер памяти входит в состав самого процессора — теперь никаких посредников между памятью и процессором нет, так что общаться им оказывается проще и быстрее. Тем не менее, новая схема является прогрессивной, потому что процессору важнее всего получить доступ к памяти как можно быстрее, даже ценой некоторого усложнения доступа для других устройств — именно он является главным потребителем и производителем той информации, которая записана в памяти.
Любой процессор обязательно оснащён как минимум одной процессорной шиной, которую в среде x86 CPU иногда по старинке называют FSB (Front Side Bus), хотя современные процессоры имеют для неё разные названия (QPI для Intel и HyperTransport для AMD). В многопроцессорных платах таких шин несколько, и связаны они с другими процессорами и чипсетом. В домашних компьютерах, где процессор, как правило, один, шина у него единственная (не считая шины памяти, если в процессор встроен её контроллер) и связывает его с чипсетом, а через него — со всеми остальными устройствами.