

Управление обратной связью
Для осуществления управления обратной связью необходимо задать значение константы CD-084 от “1” до“3” (табл.4)
Таблица П3.9
Управление обратной связью (режим ПИД-регулирования)
|
Уставка |
Описание |
|
0 |
ПИД-регулирование невозможно |
|
1 |
Управление обратной связью по величине девиации (непосредственное) |
|
2 |
Управление обратной связью по величине обратной связи (непосредственное) |
|
3 |
Управление обратной связью (характеристика обратной связи обращенная) |
Затем необходимо установить уровень заданной величины, которую необходимо поддерживать.
Задание уровня поддерживаемого параметра (давления, температуры и т.д.) производиться путем задания опорной частоты с пульта управления преобразователя (в режиме местного управления), или с использованием клемм FU(сигнал от 0 до 10 В) или клемм многоступенчатого регулирования скорости (константыCD-025…CD-029, - в режиме дистанционного управления).
Сигнал на клемме FU(по напряжению):
Установку константы рабочего режима CD-002 поставить на "2" или "3".
Клеммы многоступенчатого регулирования скорости константы CD-025…CD-029:
Произвести выбор рабочего режима, установив CD-002 на "0" или "1"("Режиммногоступенчатого регулирования скорости").
При подключении сигнала замеренной величины, сигнал должен быть подан на клемму F1 в токовом виде (от 4 до 20 мА) или в виде напряжения (от 0 до 10 мА) - в зависимости от используемого типа датчика обратной связи (см. схему подсоединения рисунок 10).
Токовый сигнал на клемме FIцепи управления:
Выбрать вспомогательный аналоговый вход уставкой константыCD-043 на "1" (перемычкаJ1 на плате панели управления преобразователя должна быть в верхнем положении).
Сигнал напряжения на клемме FIцепи управления:
Выбрать вспомогательный аналоговый вход уставкой константы CD-043 на "0" (перемычкаJ1 на плате панели управления преобразователя должна быть убрана). На рис.П3.13 представлена блок-схема системы управления с обратной связью.
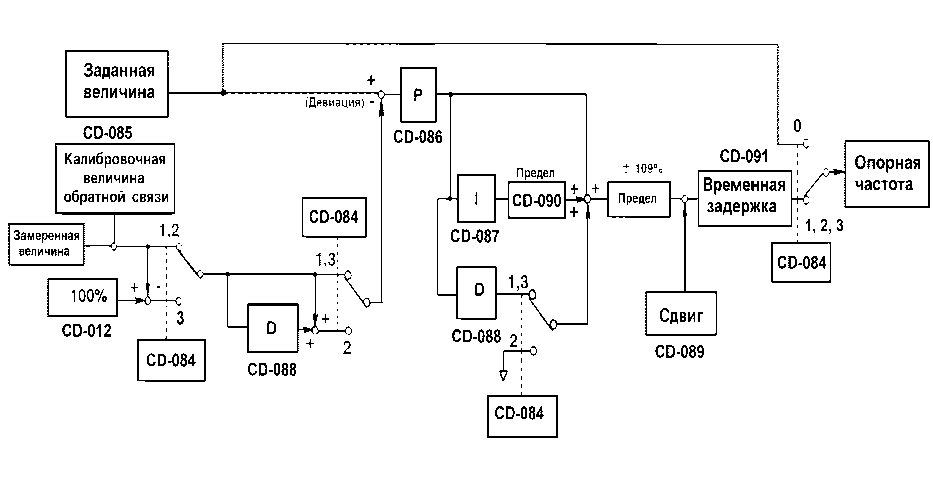
Рис.П3.13 - Блок-схема управления обратной связью
Интегральная величина 1 становится равной "0" в следующих случаях, когда управление прекращается или новое значение интегральной величины I введено с помощью выбора входа многофункциональных контактов (любая из констант ряда от СD-035 до СD-039 имеет уставку "18").
Верхний предел величины I может быть установлен с помощью константы СD-090. Увеличить величину константы СD-090 с целью расширения возможности управления за счет интегрирования. Если система управления вибрирует и это может быть прекращено настройкой времени интегрирования или времени задержки на выходе, уменьшить уставку константы СD-090.
Управление обратной связью может быть отменено с помощью сигнала на соответствующей клемме многофункциональных контактов. Установив любую из констант от СD-035 до СD-039 на "19" и замыкая контакт во время вращения можно сделать управление обратной связью невозможным, а собственно сигнал заданной величины в этом случае будет использован как сигнал опорной частоты.