

Примеры автоматизированных электроприводов и преобразователей, применяемых в типовых производственных механизмах и технологических комплексах Пример 1
Для изготовления детали с высокой точностью и хорошим качеством обработки необходим электропривод, который обеспечит требуемые скорости движения и ускорений. Он должен подходить по мощности и обеспечивать нужный диапазон регулирования.
Например, мощность должна быть не менее 5,5 кВт, диапазон регулирования выходной частоты – от 0,01 до 1000 Гц, с дискретностью 0,01 Гц, а выходного напряжения – oт 0 доUсети. Эти функции может выполнить электроприводCommanderSEс регулируемой частотой вращения для работы с трехфазными асинхронными двигателями мощностью от 0,25 до 15 кВт.
Технические данные привода представлены в табл. П3.1. Рассмотрим особенности и возможности применения электропривода CommanderSE:
изготавливаются на современном высокоавтоматизированном предприятии в Англии (фирмой ControlTechniques) только изBrandNameкомпонентов и материалов, что гарантирует высокую надежность и большой ресурс;
реализуют частотный и векторный способы управления двигателем (при векторном управлении без использования датчика скорости диапазон регулирования частоты вращения не хуже – 1/50, стабильность частоты вращения – в пределах ±(1-1,5 %);
в векторном режиме существует возможность регулирования и стабилизации развиваемого двигателем момента, диапазон регулирования момента 1/20, точность поддержания момента – не менее 3 %;
автотестирование (при неподвижном роторе двигателя и вращающемся роторе, что обеспечивает более точное определение параметров двигателя) и определение параметров двигателя, обеспечение номинального момента при бездатчиковом управлении в векторном режиме на частотах до 1 Гц при постоянном моменте нагрузки;
Таблица П3.1
Технические данные привода
|
Модель SE |
334 00750 |
|
Мощность, кВт |
7,5 |
|
Номинальный выходной ток, А |
16,5 |
|
Диапазон регулирования |
Выходной частоты от 0,01 до 1000 Гц, с дискретностью 0,01 Гц; выходного напряжения – oт 0 до Uсети |
|
Частота ШИМ |
Регулируется пользователем от 3 до 12 кГц |
|
Uном входа, В |
380..480 |
|
Рабочая температура среды, ºС |
От минус 10 до плюс 40 |
|
Габариты,Высота/ширина/глубинамм |
315 180 155 |
автотестирование (при неподвижном роторе двигателя и вращающемся роторе, что обеспечивает более точное определение параметров двигателя) и определение параметров двигателя, обеспечение номинального момента при бездатчиковом управлении в векторном режиме на частотах до 1 Гц при постоянном моменте нагрузки;
встроенный ПИД-регулятор для эффективной работы в замкнутой системе регулирования по аналоговому сигналу;
источник питания внешнего датчика напряжением 25 В с нагрузочной способностью до 100 мА;
- удобное меню пользователя с тремя уровнями доступа к программируемым параметрам. На первом уровне доступны десять наиболее важных и часто встречающихся парараметров; второй уровень также доступен с ручного пульта управления, что создает чрезвычайную легкость настройки и управления; расширенные возможности преобразователя реализуются через последовательный интерфейс RS-485, в том числе, с помощью бесплатного программного обеспеченияSESoftPCWindowsTM;
предусмотрена возможность расширения коммуникационной способности по шинам Profibus-DP,DeviceNet,CanOpen,InterbusSandCTNetс помощью встраиваемых дополнительных модулей;
тормозной ключ встроен во всех типоразмерах.
Для приводов CommanderSEможно использовать следующие опции:
модуль QuickeySEдля быстрой передачи параметров (SE55);
стандартные фильтры подавления радиочастотных помех тыльного/бокового монтажа и более дешевые фильтры подавления радиочастотных помех панельного монтажа;
универсальная выносная панель, степень защиты IP65, плоский текстовый дисплей;
программное обеспечение SESoftдля настройки, управления и программирования параметров верхнего уровня, используемое в средеWindows;
плата аналогового входа от плюс 10 до минус 10 В для двунаправленного сигнала задания (SE51);
кронштейн экранировки кабелей и зажимы для обеспечения общепринятого способа подключения экранов кабелей питания, двигателя и управляющего кабеля к заземлению;
конвертор EIA232 вEIA485 (двухпроводный) для соединения привода с персональным компьютером при использованииSESoft(SE71 коммуникационный кабель);
модули связи по шинам Fieldbus:
Profibus DP (SE73), Device Net (SE77), CAN Open (SE77), Interbus (SE74), CT Net (SE75);
входные сетевые дроссели переменного тока;
тормозные резисторы и монтажная плата.
Порядок работы и программирование
Дисплей и клавиши управления используются для следующих целей (рис. 1):
отображения состояния привода;
отображения на дисплее неисправностей или кодов отключения;
считывания и изменения значений параметров;
останова, пуска и сброса привода.
На рис. П3.1 дисплей и клавиши управления показаны в режиме, когда к приводу подано питание переменного тока.
Клавиша Mиспользуется для изменения режима работы дисплея.Для перехода дисплея изрежима отображения состояния в режим просмотра параметров необходимо нажать клавишу М, а затем отпустить ее в течение двух секунд.
При удержании клавиши Mв таком состоянии в течение двух секунд, режим отображения состояния изменится с индикации скорости на индикацию нагрузки и наоборот.
При выключении питания привод будет запоминать единицы измерения, в которых выводились данные на дисплей, поэтому при последующей подаче питания данные будут высвечиваться в тех же единицах измерения.
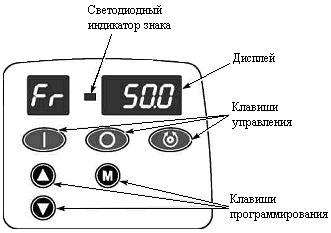
Рис. П3.1. Дисплей и клавиши системы управления