ShPORY_AEP
.doc|
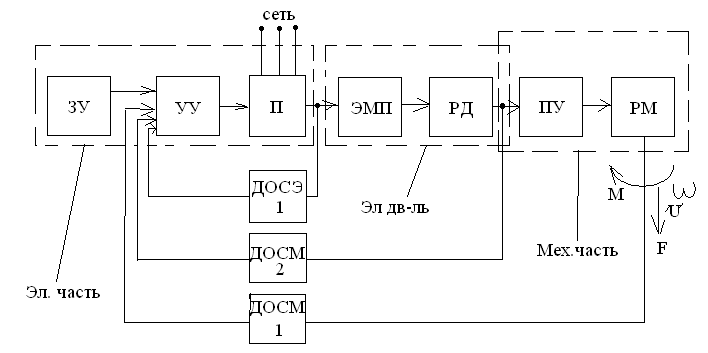
1 Понятие «Автоматизированный электропривод». Структурная схема АЭП. Автоматизированный эл.привод – это эл.механическая система состоящая из эл. двигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочих машин и целенаправленного управления этими процессами. Структурная схема приведена на рисунке 1.
ЭМП - электродвигательное устройство. ЗУ – задающее уст-во. УУ – управляющее уст-во. П – преобразователь. ПУ – передаточное уст-во. РМ – рабочий мех-м. |
2 Классификация ЭП. По роду тока Электропривод постоянного и переменного тока. По способу распределения механической энергии 1) Групповой ЭП 2) Индивидуальный ЭП. 3) Взаимосвязанный ЭП. По виду движения различают реверсивный и нереверсивный ЭП поступательного либо вращательного движения. По степени управляемости 1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной скоростью, параметры привода меняются только в результате возмущающих воздействий; 2) регулируемый - скорость рабочего органа может изменяться в указанных пределах, параметры привода могут меняться под воздействием управляющего устройства; 3) программно-управляемый – скорость вращения изменяется согласно некоторой программе; 4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом; 5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима. По роду передаточного устройства 1) Редукторный; 2) Безредукторный;
|
3 Классификация по уровню автоматизации ЭП. 1) Неавтоматизированный. Управление осуществляется в ручную. Применяется в установках малой мощности, бытовой и медицинской технике. 2) Автоматизированный. Регулирование параметров происходит автоматически, управляющие команды задаются вручную. 3) Автоматический. Управляющие воздействия вырабатываются автоматически, без участия оператора.
|
|
4 Задачи проектирования систем управления АЭП.
Электропривод позволяет эффективно решать сложные и ответственные задачи, связанные с повышением производительности, точности и автоматизации оборудования. Задачи: - расчет механической части электропривода; - расчет силовой части системы управления; - расчет информационной части системы управления; - расчет энергетических показателей эл.привода;
|
||
|
5 Управление пуском ЭД в функции скорости.
|
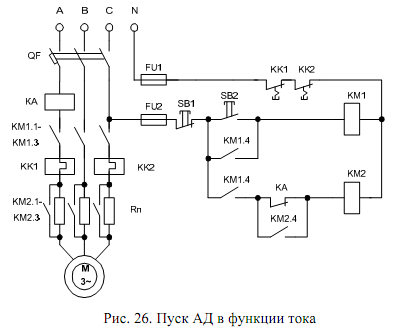
6 Управление пуском ЭД в функции тока.
|
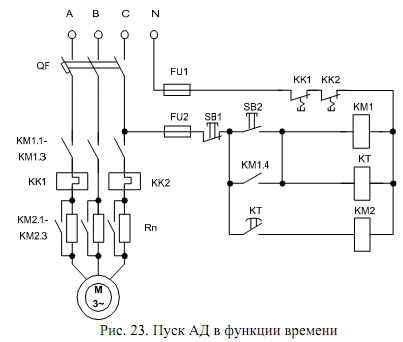
7 Управление пуском ЭД в функции времени.
|
|
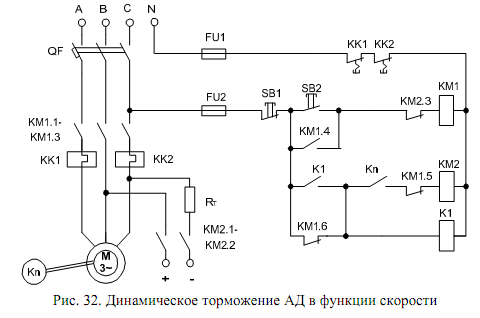
8 Автоматическое управление торможением ЭД в функции скорости.
|
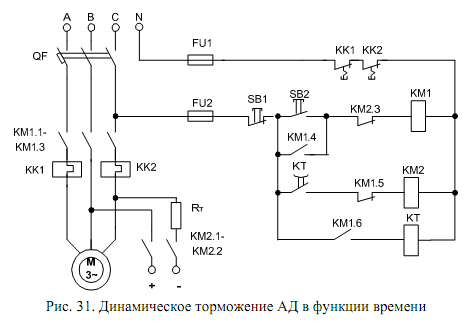
9 Автоматическое управление торможением АД в функции времени.
|
10 Торможение противовключением.
|
|
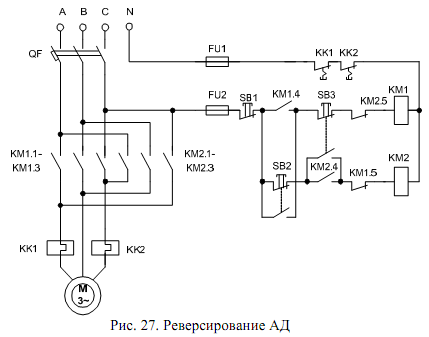
11 Схема реверсирования АД.
|
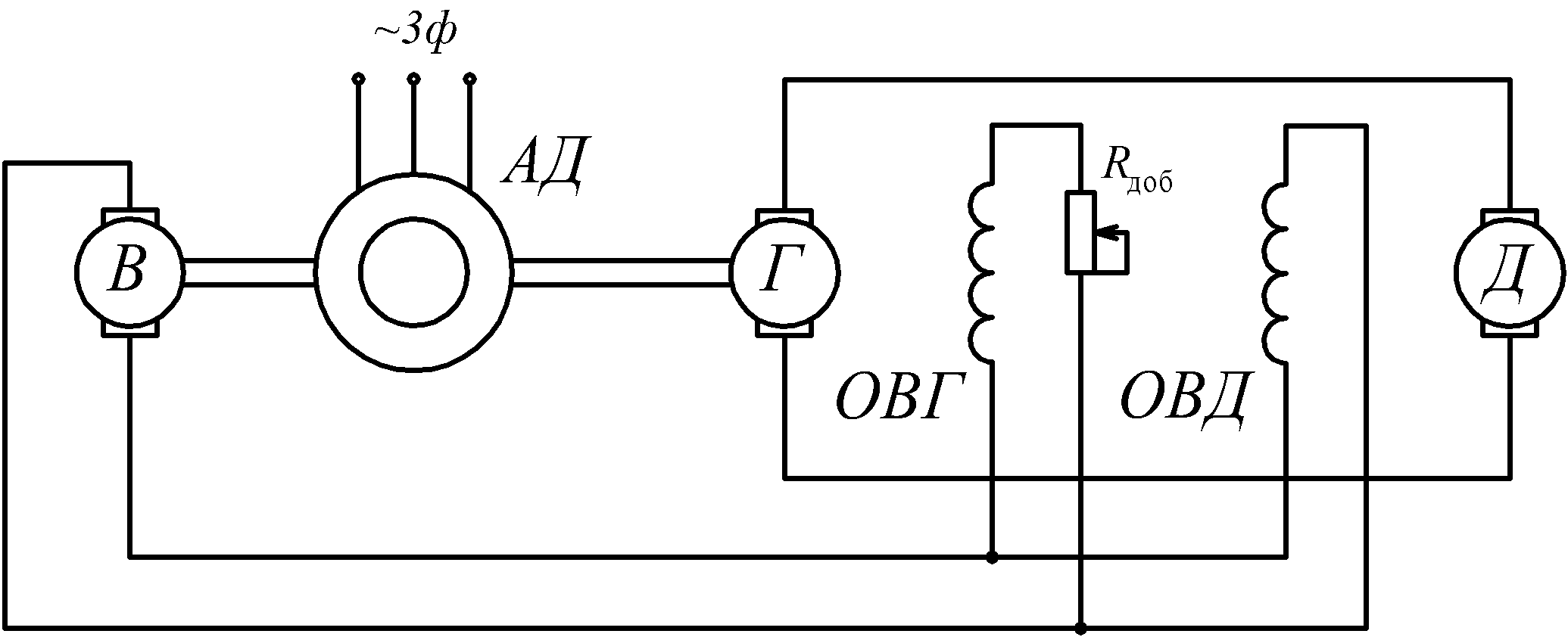
12 Система генератор-двигатель (Г-Д).
Она состоит из приводного двигателя Д, который механически связан с генератором постоянного тока Г. Величина ЭДС генератора регулируется путем изменения напряжения на обмотке возбуждения генератора. Якоря генератора и двигателя электрически связаны друг с другом. Регулируемым параметром в данном случае выступает величина ЭДС двигателя. Для обеспечения магнитного потока в двигателе и генераторе используется возбудитель, который представляет собой ДПТ меньшей мощности Рв = 0,05-0,1Рд. В настоящее время в качестве возбудителей используются полупроводниковые преобразователи. Из уравнения равновесия напряжений по второму закону Ома можно составить уравнение ЭДС Ег –Е =I(Rг+Rд), где Ег – ЭДС генератора, Rг – сопротивления якоря генератора. Подставив в это уравнение Е=кФω и тока двигателя I=М/кФ, получаем уравнение мех. хар-к:
Недостаток: низкий КПД.
|
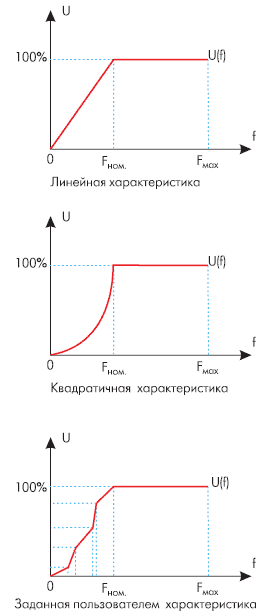
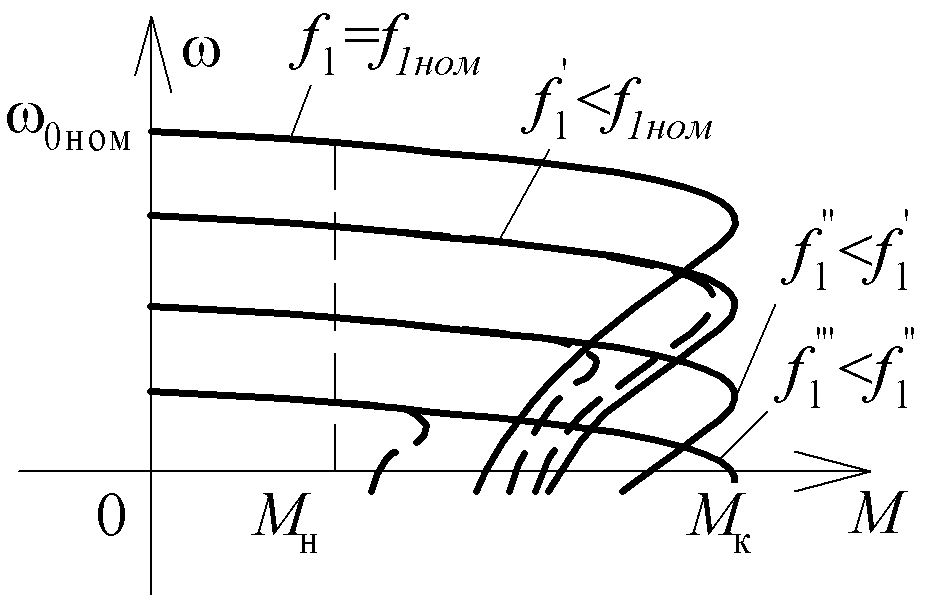
13 Основные понятия частотного управления
Частотный способ регулирования скорости АД является превалирующим, наиболее перспективным и основным в настоящее время. Принцип заключается в изменении скорости х.х. при изменении частоты. Этот способ обеспечивает плавное регулирование в широком диапазоне, высокую жесткость получаемых механ. х-к, регулирование скорости не сопровождается увеличением скольжения, поэтому потери мощности при регулировании скорости оказываются не большими. ωо=2nf1/p U1~E1=√2 π(w1ko)f1Ф, Где w 1 – число витков фазы обмотки статора; Ко – обмоточный коэффициент АД; f1 – частота сети; Ф – магн. поток в в воздушном зазоре АД. Из этого следует, что работа АД в режиме частотного упр-я нри неизменном напряжении не возможна. Мс=const; U/f=const. Мс=сω²; U/f²=const. Мс=с/ω; U/√f= const.
ΔP2=МωоS- потери минимальны. |
|
14 Экономическая оценка энерго- и ресурсосбережения.
Модернизация действующих электроприводов с целью энерго-и ресурсосбережения требует капитальных затрат, эффективность которых должна быть экономически оправдана. Таким образом, возникает необходимость экономической оценки энергосберегающих мероприятий и их результатов. Экономическая эффективность (ЭЭ) энергосберегающих мероприятий и их результатов, производится путем сопоставления стоимостных оценок получаемых результатов Р и проведенных затрат 3 на их реализацию по следующей формуле: ЭЭ=Р – З При ЭЭ > 0 энергосберегающее мероприятие экономически эффективно, в противном случае — нет. Для энерго- и ресурсосберегающих проектов результаты обусловливаются получаемой экономией энергии и материальных ресурсов при общем повышении технического уровня обслуживаемого технологического процесса. Эффект может быть выражен как в натуральных единицах (кВт • ч электроэнергии), так и в стоимостных оценках. Особенностью большинства проектов энерго- и ресурсосберегающих мероприятий в электроприводе являются небольшие сроки реализации, поэтому для определения их экономической эффективности применяются статические методы, связанные с расчетом срока окупаемости проекта. При модернизации расчет срока окупаемости производится по формуле: Ток = КЗ/ΔЭЗ где КЗ — капитальные затраты при модернизации; ΔЭЗ — разность эксплуатационных затрат, до и после модернизации, получаемая за счет производимых капитальных затрат. Срок окупаемости более дорогого варианта энерго- и ресурсосберегающего проекта: Ток = (КЗ1 – КЗ2) / (ЭЗ1 – ЭЗ2) где КЗ1, ЭЗ1 — соответственно капитальные и эксплуатационные затраты более капиталоемкого варианта проекта; КЗ2, ЭЗ2 — соответственно капитальные и эксплуатационные затраты менее капиталоемкого варианта. Рассчитанный по приведенным формулам срок окупаемости сопоставляется с нормативным периодом времени, и делается вывод о принятии или непринятии данного проекта для реализации.
|
15 Основные понятия управления вентиляторным, насосным и компрессорным оборудованием.
Все регулирующие устройства в зависимости от их влияния на характеристику сети или нагнетателя можно разделить на три группы: 1. Устройства, дросселирующие сеть, т.е. изменяющие характеристику сети, но не изменяющие характеристику нагнетателя (клапаны, шиберы, задвижки, диафрагмы) При этом частота вращения рабочего колеса неизменна 2. Устройства, изменяющие частоту вращения рабочего колеса. При этом характеристика сети не меняется (электродвигатели постоянного и переменного тока, фрикционные передачи, гидромуфты, индукторные муфты скольжения). 3. Устройства, одновременно изменяющие характеристику нагнетателя и сети.
|
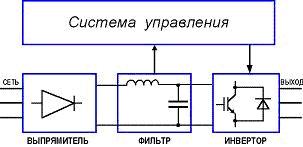
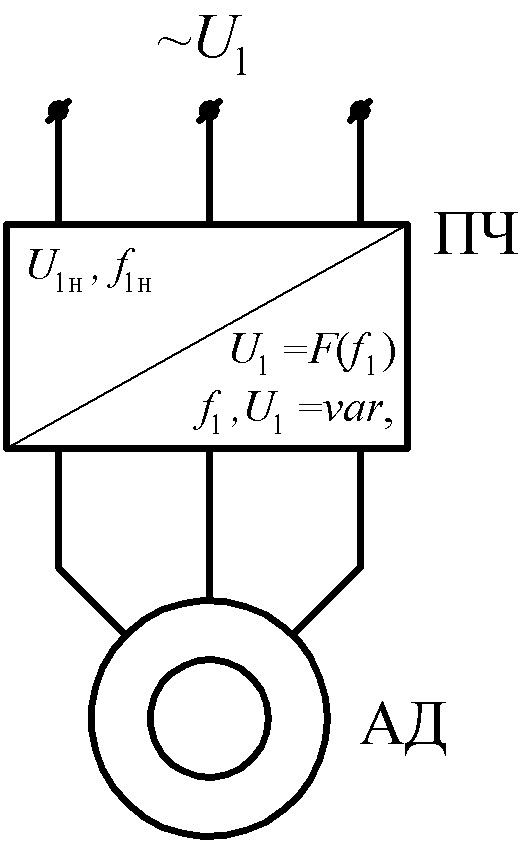
16 Система управления насосом с преобразователем частоты.
Преобразователи Частоты (ПЧ) или частотно регулируемый электропривод, предназначены для плавной регулировки скорости и момента вращения вала электродвигателя путем изменения частоты переменного тока. Но наибольшее распространение получили преобразователи чаcтоты с промежуточным контуром постоянного тока, выполненные на базе инверторов напряжения. Структурная схема такого преобразователя приведена на Рис. 1
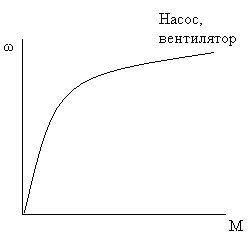
У насосов и вентиляторов момент нагрузки возрастает с увеличением скорости вращения. Для регулирования электроприводов насосов и вентиляторов используется квадратичная зависимость напряжения/частоты (U/f²=const).
|
|
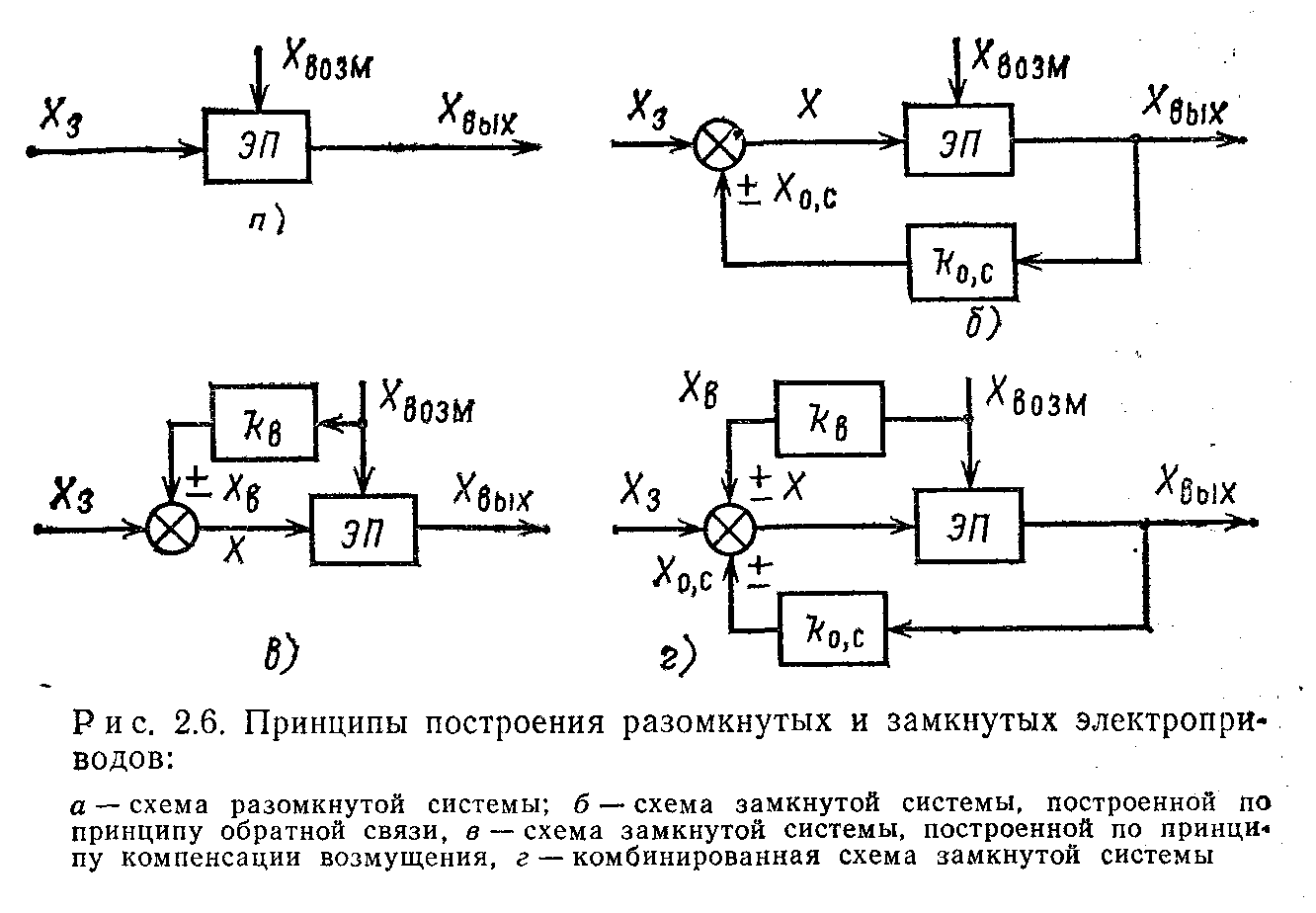
18 Замкнутые и разомкнутые системы линейного электропривода. Различают разомкнутые и замкнутые системы управления электроприводом. Системы электропривода, управляемые по разомкнутому циклу, называются разомкнутыми системами. Процесс управления по этой системе характеризуется отсутствием всякого измерения и контроля значения регулируемой величины (скорости, момента и т. п.). Для пояснения понятия разомкнутых систем управления обратимся к рис. а. На рисунке приняты обозначения: ЭП – электропривод; ХВЫХ – выходная координата ЭП; ХЗ–задающий сигнал, определяющий уровень ХВЫХ; ХВОЗМ – возмущающее воздействие. Последнее в общем случае определяется различными помехами, колебаниями питающего напряжения, аварийными ситуациями и нагрузкой электропривода, которая является основным возмущающим воздействием для электропривода. Разомкнутая система не обеспечивает отстройку выходной величины от внешних возмущений, которые проявляются в изменении уровня ХВЫХ. Это является наиболее существенным недостатком разомкнутых систем. Системы, управляемые по замкнутому циклу и называемые замкнутыми, одновременно используют два канала информации: задающей и о фактическом значении регулируемой величины — обратная связь. Задающая информация ХЗ сравнивается с информацией обратной связи ХО,С, и в зависимости от значения и знака результирующего сигнала Х по каналу управления вырабатывается регулирующее воздействие на электропривод таким образом, чтобы свести ошибку (или рассогласование) к минимуму. Качество и точность работы системы с обратными связями намного выше, чем разомкнутой.
|
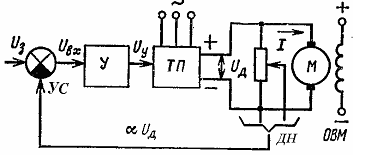
20 Система автоматического регулирования угловой скорости с жесткой обратной связью по напряжению.
М- ДПТ НВ; ТП-тиристорный преобразователь; У - усилитель; РМ - рабочий механизм; УС- узел сравнения; ДН- датчик напряжения. Система уравнений, которая характеризует все элементы электропривода в установившемся режиме его работы, имеет следующий вид: 1. Uвх = Uз - α Uя , где α - коэффициент усиления обратной связи. 2. Uя = Етп – IRтп. 3. Ея = Кω - противо-ЭДС двигателя. 4. Етп = КуКтпUвх. 5. Uя = Ея + IRя. 6. М = КI (К- машинная постоянная). Решая совместно систему состоящую из представленных выше уравнений относительно частоты вращения, можно получить уравнение механической характеристики двигателя, работающего в составе рассматриваемого электропривода.
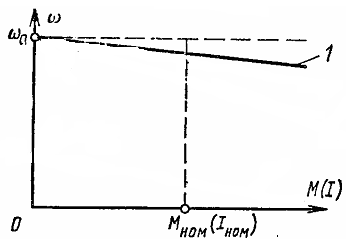
Механическая характеристика двигателя представляет собой прямую линию. Уравнение естественной механической характеристики двигателя постоянного тока независимого возбуждения, получающего питание от электрической сети имеет вид:
Сравнивая жесткость естественной механической характеристики и жесткость механической характеристики двигателя, работающего в рассматриваемом электроприводе, можно заключить, что они одинаковые. Таким образом, в рассматриваемой системе автоматизированного электропривода введение жесткой отрицательной обратной связи по напряжению не компенсирует уменьшение частоты вращения под действием статического момента нагрузки. Обратная связь по напряжению будет компенсировать изменение частоты вращения при колебаниях напряжения U в сети, от которой получает питание ТП за счет сигнала управления на выходе усилителя Uу = (Uз - α Uя)Ку.
|
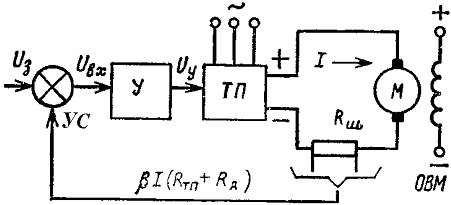
21 Система автоматического регулирования угловой скорости с жесткой положительной ОС.
В схеме используется датчик тока в виде электрического шунта с сопротивлением Rш. С шунта снимается напряжение обратной связи, пропорциональное току якоря Uос = IRш. Eсли ввести обозначение β = Rш / (Rя+Rтп) - коэф. усиления обр. связи, то Uос = βI(Rя+Rтп) В этом случае система уравнений, описывающих поведение звеньев электропривода в установившемся режиме его работы, можно записать в следующем виде 1. Uвх = Uз + βI(Rя+Rтп) 2. Uя = Етп - IRтп 3. Ея = Кω 4. Етп = КуКтпUвх 5. Uя = Ея +IRя 6. М = КI Решив эту систему уравнений относительно частоты вращения можно получить уравнение механической характеристики двигателя, работающего в рассматриваемом электроприводе
Поскольку коэффициенты усиления усилителя и ТП являются постоянными величинами, то можно утверждать, что механическая характеристика двигателя представляет собой прямую линию. Наклон механической характеристики определяется произведением Ксβ, величину которого можно выставить при настройке электропривода. Здесь возможны три случая: 1.
Ксβ = 1,
( характеристика 3). Если при росте нагрузки коэффициент усиления падает, характеристика становится нелинейной (кривая 3’). 2. Ксβ > 1, (характеристика 1). 3. Ксβ < 1, (характеристика 2). Анализ трех возможных случаев настройки электропривода показывает что в системе автоматического регулирования с положительной обратной связью по току якоря компенсация падения частоты вращения из-за изменения статического момента нагрузки достигается в первом случае за счет изменения ЭДС ТП.
|
|
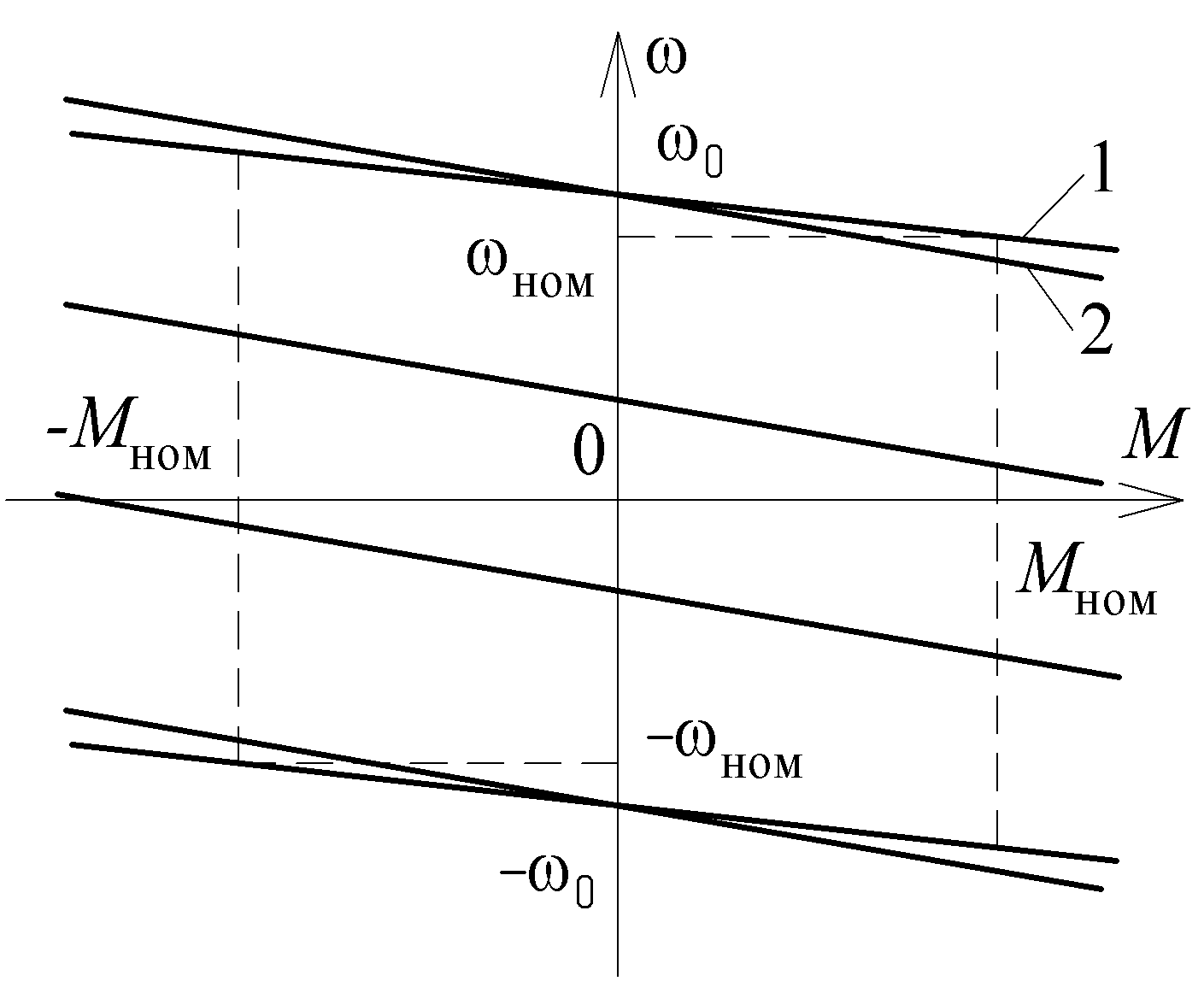
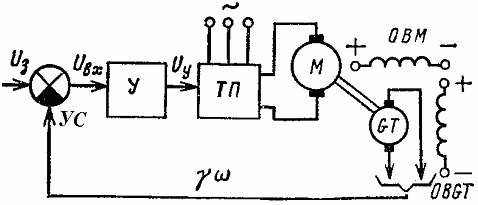
22 Система автоматического регулирования угловой скорости с жесткой отрицательной обратной связью по угловой скорости.
В схеме используется датчик частоты вращения в виде тахогенератора GT, у которого генерируемое напряжение пропорционально частоте вращения. С
увеличением статического момента
нагрузки, частота вращения двигателя
начнет уменьшаться, следовательно,
начнет уменьшаться напряжение обратной
связи
Uвх = Uз-Uос, Uу = (Uз-Uос)Ку. Следовательно, возрастет ЭДС ТП, что автоматически приведет к компенсации падения частоты вращения двигателя. Составим систему уравнений, описывающих работу всех элементов, входящих в состав электропривода, в установившемся режиме его функционирования. 1. Uвх = Uз - γω, где γ – коэф. пропорциональности GT. 2. Uя = Етп - IRтп 3. Ея = Кω 4. Етп = КуКтпUвх 5. Uя = Ея +IRя 6. М = КI Решая совместно систему, состоящую из представленных выше уравнений относительно частоты вращения, можно получить уравнение механической характеристики двигателя, работающего в составе рассматриваемого электропривода:
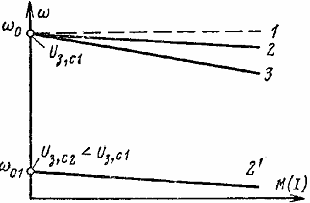
Характеристики построены для двух случаев: 1. Кс стремится к бесконечности, характеристика 1. 2. Кс не равно бесконечности, характеристика 2. Характеристика 3 - естественная механическая характеристика двигателя, работающего в разомкнутой системе. |
23 Классификация обратных связей.
Обратные связи подразделяются на жесткие и гибкие. Жесткие обратные связи - это такие связи, которые действуют как в установившихся, так и в переходных режимах. Гибкие обратные связи действуют только в переходных режимах. Обратные связи бывают как положительные, так и отрицательные. Положительные обратные связи (ПОС) - это такие обратные связи, которые при увеличении выходной координаты , еще больше увеличивают ее, так как напряжение на выходе узла обратной связи Uoc суммируется с задающим воздействием Uз. Отрицательные обратные связи (ООС) - это такие обратные связи, которые при увеличении выходной координаты, стремятся ее уменьшить, так как напряжение на выходе узла обратной связи Uoc вычитается из задающего воздействия Uз. Обратные связи могут формировать сигналы (напряжения) пропорциональные значению или пропорциональные производной от значения напряжения, тока, частоты вращения, угла поворота и т.д. В этих случаях они называются жесткими или гибкими, положительными или отрицательными обратными связями соответственно по напряжению, току, частоте вращения, углу поворота и т.д. При этом система привода должна иметь соответствующие датчики (датчики напряжения, тока, частоты вращения…). |
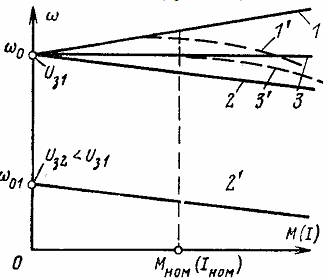
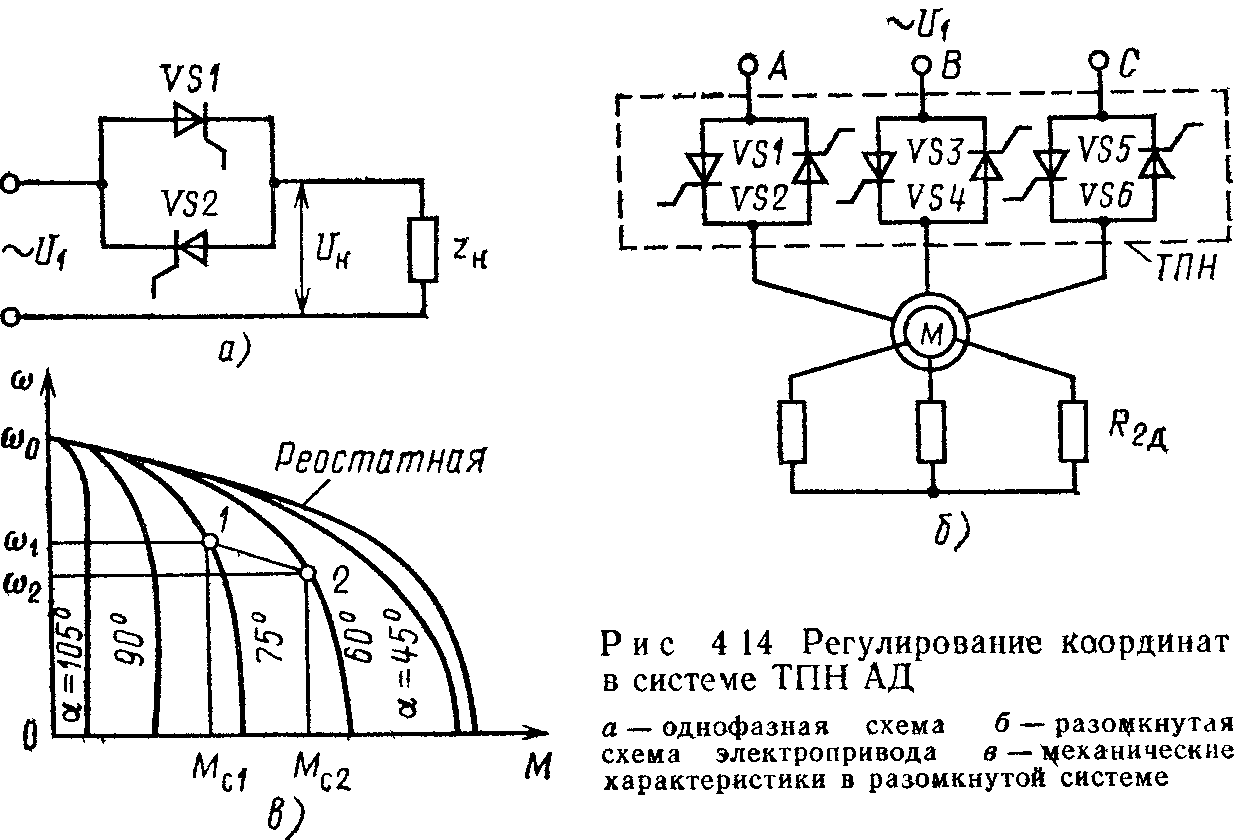
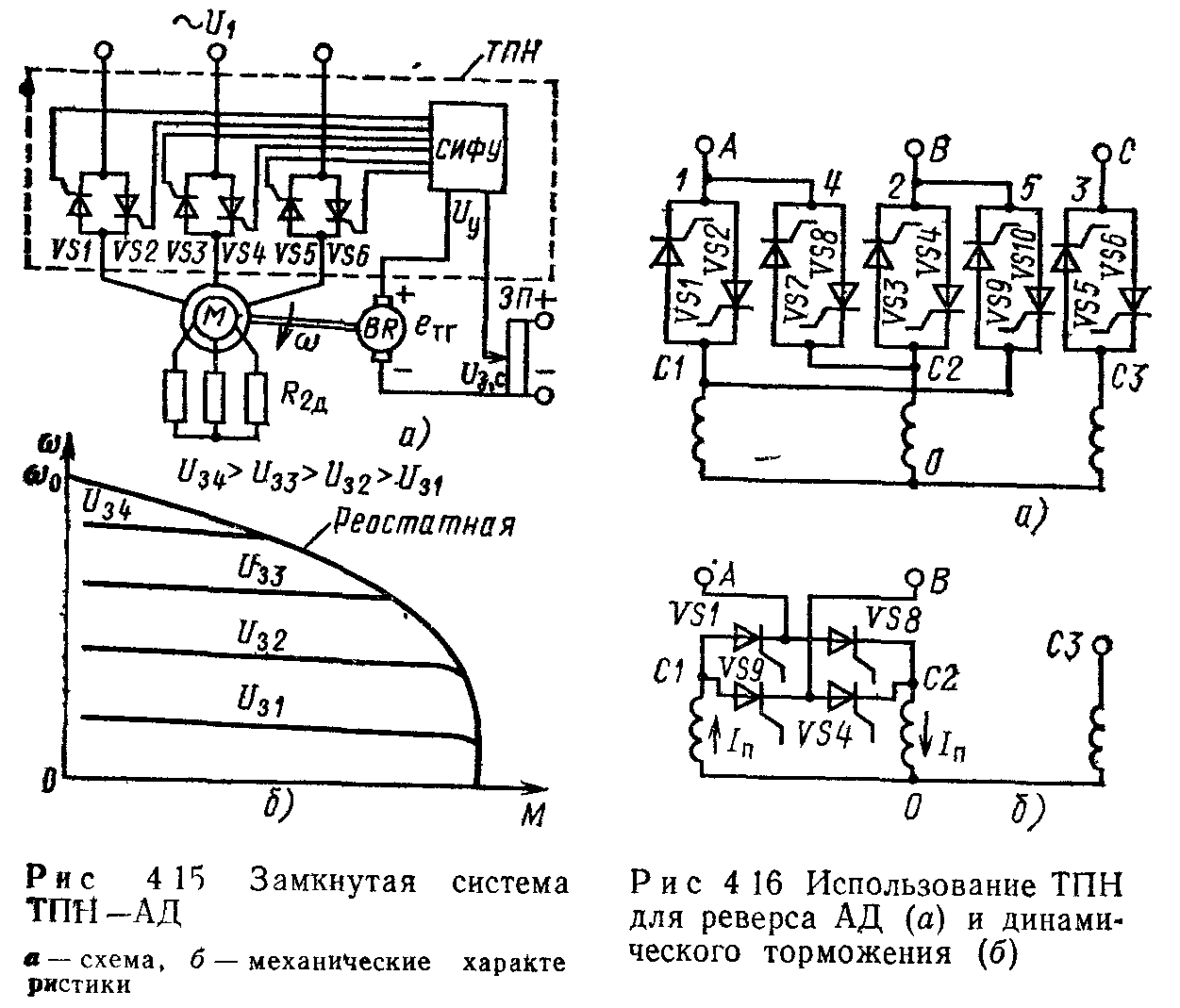
24 Автоматическое регулирование угловой скорости асинхронных ЭП при помощи тиристорных регуляторов напряжения.
Рассмотрим работу схемы при увеличении нагрузки на валу АД. Пусть при скорости АД 1 таким образом подобраны задающий сигнал Uз,с и сигнал обратной связи етг, что угол управления равен 75° (рис.4.15, в). Тогда при моменте сопротивления Mс1 АД будет работать в точке 1. При увеличении нагрузки на валу АД до значения Мс2 скорость АД начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора етг~. Уменьшение етг вызывает увеличение напряжения управления Uy, что определит уменьшение с помощью СИФУ угла управления до значения =60°. Двигатель при этом станет работать в точке 2 на характеристике, соответствующей =60°. При этом угловая скорость 2 будет меньше, чем 1, однако путем соответствующего выбора тахогенератора и параметров СИФУ можно получить достаточно жесткие механические характеристики, например характеристику вида 1–2. Изменяя с помощью потенциометра ЗП значение задающего напряжения Uз,с, можно получить ряд механических характеристик электропривода, показанных на рис. 4.15, б. Из рис. 4.15, б следует, что эти характеристики имеют относительно высокую жесткость и перегрузочную способность и позволяют обеспечить большой диапазон регулирования скорости АД.
|
|
31 Способы управления тиристорами.
Возможны три способа управления тиристорами: с помощью сигнала управления; превышением напряжения переключения; быстро нарастающим напряжением du/dt (второй и третий способы применяются в основном для включения диодных тиристоров). Отпирание тиристоров с помощью сигнала управления может осуществляться от источника постоянного, переменного и импульсного токов. В технических условиях на тиристоры приводятся параметры Uу и Iу, измеренные на постоянном токе, однако управление от источников постоянного тока не нашло широкого применения. Более эффективно управление тиристорами ст источников переменного напряжения (фазовое управление). Однако способность тиристоров работать в импульсных режимах позволяет использовать для их управления наиболее экономичные импульсные источники тока. В этом случае тиристоры включают кратковременными сигналами определенной амплитуды и длительности.
|
||
|
27 Основные типы тиристорных преобразователей частоты.
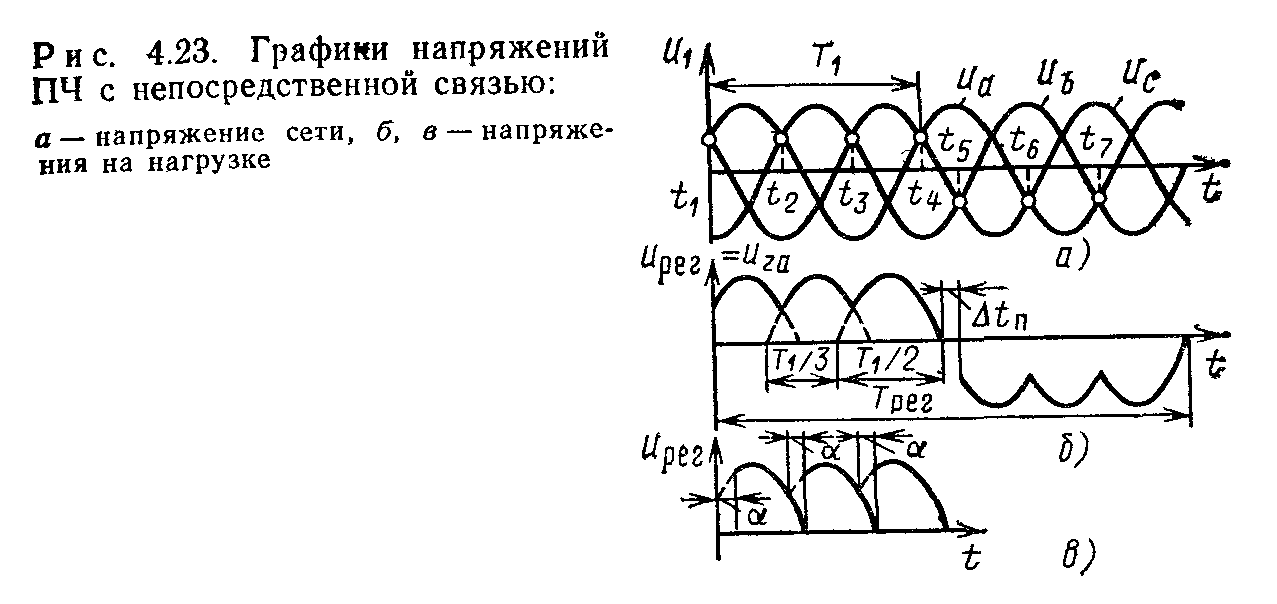
1. Преобразователи частоты с непосредственной связью. Предназначен для преобразования высокой частоты в низкую. В основе преобразователя лежит трехфазная нулевая схема выпрямления.
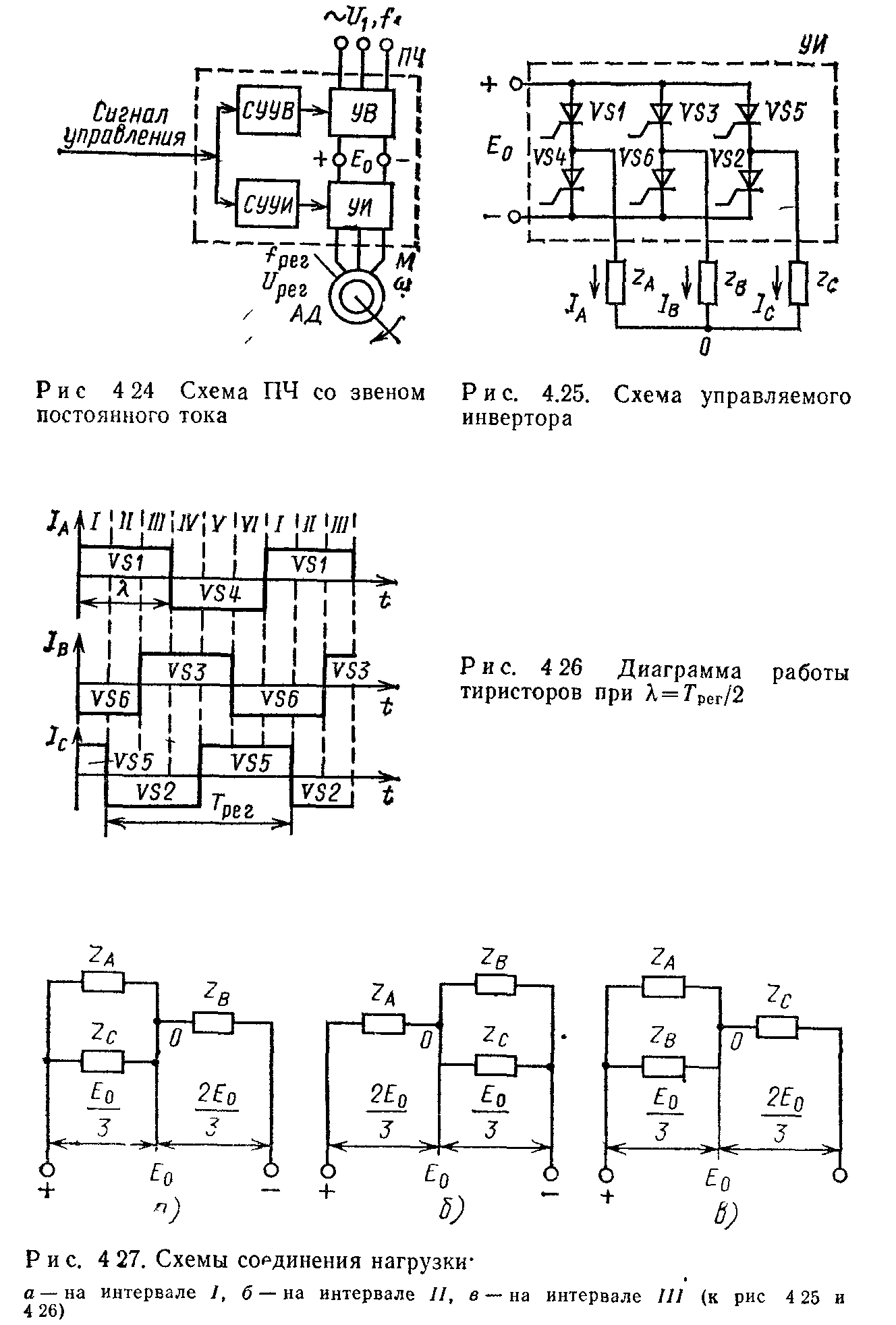
Достоинства: высокий КПД; возможность независимого регулирования амплитуды напряжения на выходе от частоты; возможностьплавно регулировать выходную частоту fpeг. Недостатки: ограниченное регулирование выходной частоты (0-40 % f сети ). 2. Статический преобразователь частоты с промежуточным звеном постоянного тока. Преобразователь состоит из управляемого выпрямителя УВ и инвертора УИ. Кроме двух силовых элементов преобразователь содержит блок управления выпрямителем СУУВ и блок управления инвертором СУУИ. Выходная частота регулируется в широких пределах. Преобразователь
позволяет регулировать частоту как
вверх, так и вниз от частоты питающей
сети.
3. Преобразователь частоты с инвертором работающим по принципу широтно-импульсной модуляции. В тех случаях, когда инвертор питается от сети постоянного тока или от неуправляемого выпрямителя, применяют широтно-импульсные регуляторы напряжения (ШИР). В случае применения в преобразователе автономных инверторов с фазной коммутацией тиристоров в инверторе совмещают функции инвертирования и регулирования напряжения методом широтно-импульсной модуляции. Отличительной особенностью этих инверторов является не только регулирование напряжения и частоты, но и получение формы выходного тока, близкого к синусоидальному.
|
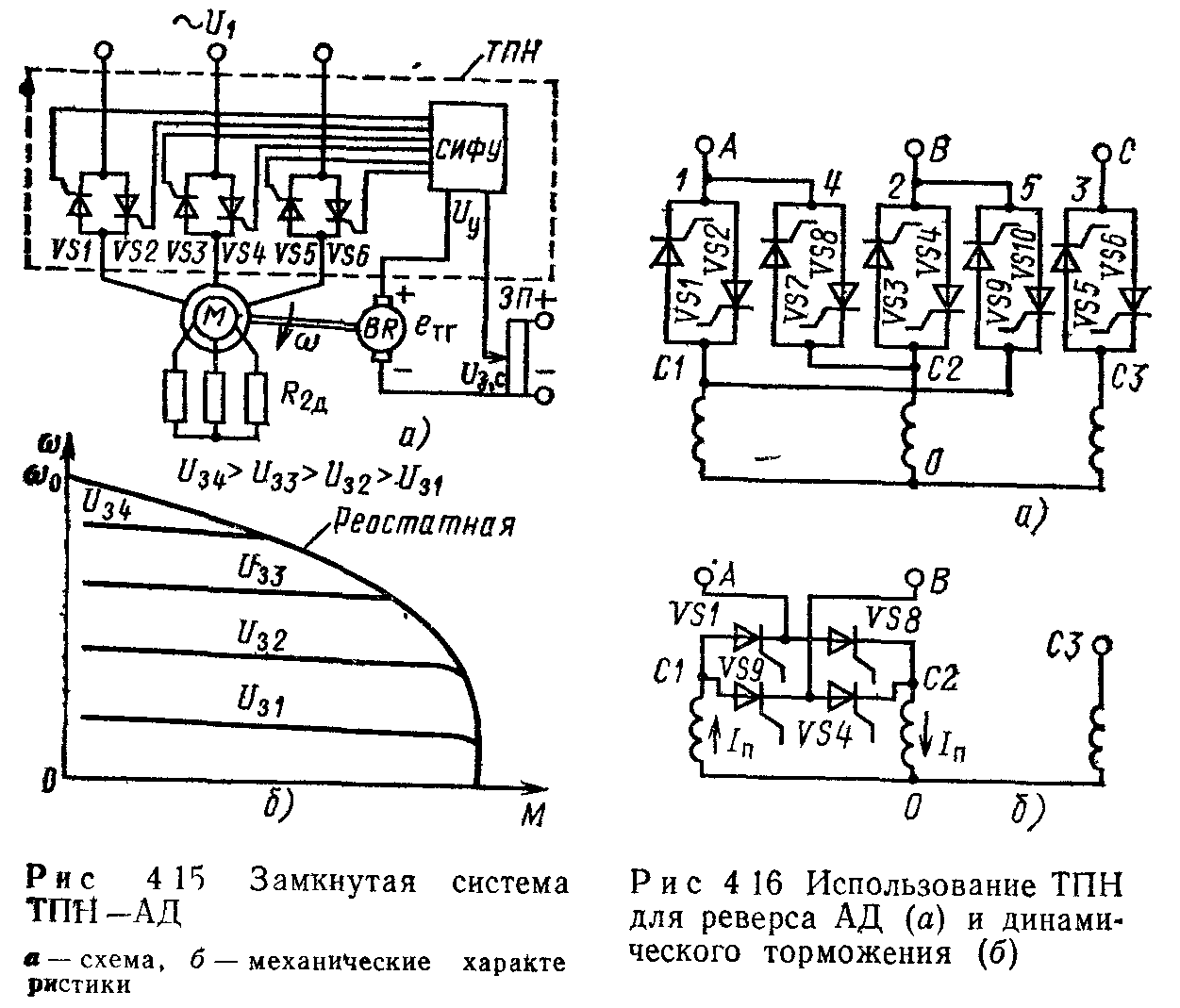
32 Тиристорный электропривод постоянного тока. Его характеристики. Принцип действия, свойства и характеристики системы тиристорный преобразователь–двигатель (ТП–Д) рассмотрим на примере схемы рис. 3.14, где в качестве преобразователя использован однофазный двухполупериодный нереверсивный выпрямитель, собранный по нулевой схеме.
Преобразователь включает в себя согласующий трансформатор Т, имеющий две вторичные обмотки, тиристоры V1 – V6 и систему импульсно-фазового управления тиристорами (СИФУ). Преобразователь обеспечивает регулирование напряжения U на ДПТ за счет изменения среднего значения ЭДС преобразователя ЕП. Это достигается, в свою очередь, за счет регулирования угла управления тиристоров , представляющего собой угол задержки открытия тиристоров V1 – V6 относительно момента их естественного открытия. Когда =0, т.е. тиристоры V1 – V6 получают импульсы управления от СИФУ в момент их естественного открытия, преобразователь осуществляет двухполупериодное выпрямление и к ДПТ прикладывается полное напряжение. Если теперь с помощью СИФУ осуществлять подачу им пульсов управления не в момент естественного открытия тиристоров V1 - V6, а со сдвигом на угол 0, то ЭДС преобразователя снизится и этому случаю будет соответствовать уже меньшее среднее напряжение, подводимое к ДПТ.
_________________________________________________________
40 Эффекты, используемые в кремниевых датчиках. Эффекты, свойственные кремнию: - эффект Холла - возникновение в твердотельном проводнике с током, помещенном в магнитное поле, электрического поля в направлении, перпендикулярном направлению тока и магнитного поля. - эффект Зеебека - возникновение ЭДС в электрической цепи, состоящей из последовательно соединенных разнородных проводников, контакты между которыми находятся при разной температуре. - пьезорезистивный эффект - температурная зависимость - тензорезистивные свойства - датчики, реализованные на его основе, реагируют на механические напряжения. |
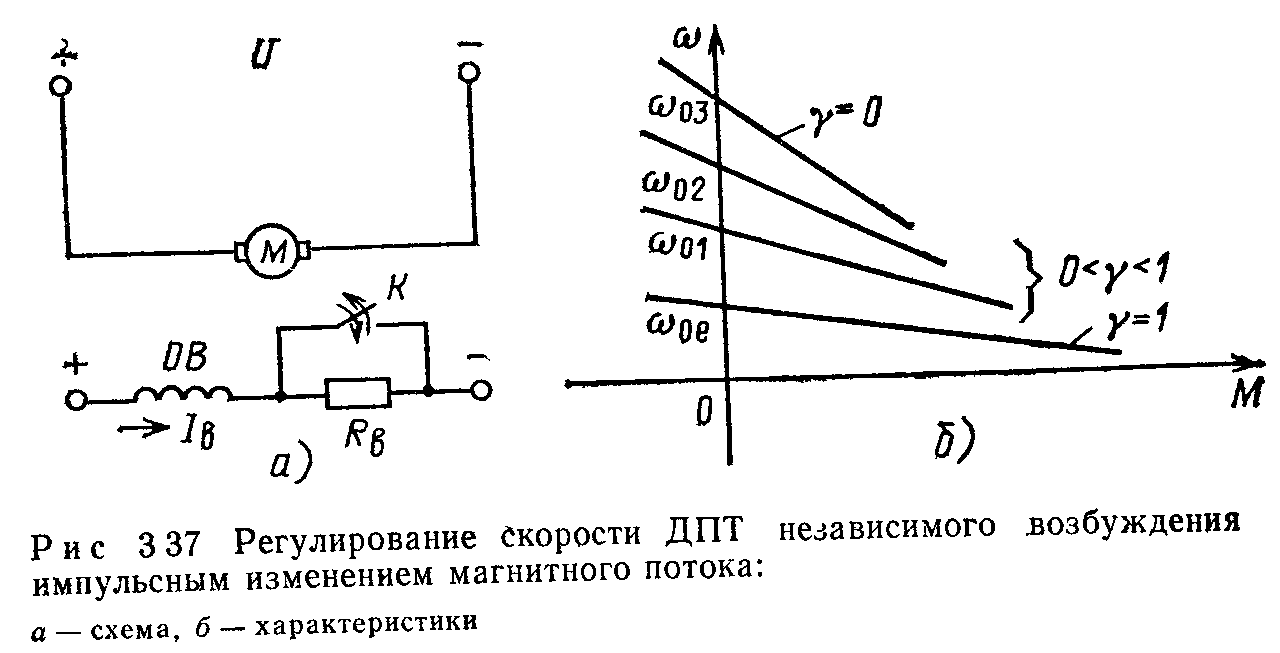
33 Импульсное регулирование частоты вращения двигателя постоянного тока. Импульсное регулирование магнитного потока ДПТ независимого возбуждения реализуется в схеме рис. 3.37, а. В этой схеме в цепь обмотки возбуждения включен добавочный резистор Rв и параллельно ему ключ К, скважность работы которого может регулироваться в пределах от 0 до 1.
При =1 ключ К постоянно замкнут, резистор Rв зашунтирован (закорочен), по обмотке возбуждения протекает номинальный ток и ДПТ имеет естественную характеристику (рис. 3.37, б). При =0 ключ К постоянно разомкнут, резистор Rв введен в цепь обмотки возбуждения, ток возбуждения и магнитный поток уменьшены и ДПТ имеет искусственную характеристику, располагающуюся выше естественной. При промежуточных значениях скважности характеристики располагаются между этими двумя предельными характеристиками. _________________________________________________________
44 Почему насосы и вентиляторы признаны основными объектами энергосбережения средствами электропривода.
У насосов и вентиляторов момент нагрузки возрастает с увеличением скорости вращения. Механическая характеристика описывается уравнением квадратичной параболы, а значит, потребляемая мощность пропорциональна кубу скорости вращения. Из этого следует, что даже небольшое снижение скорости электропривода может дать значительный выигрыш в мощности - вот почему экономия электроэнергии является главным преимуществом использования управляемого электропривода для насосов и вентиляторов. Теоретически снижение скорости на 10% даёт тридцати процентную экономию мощности.
|
|
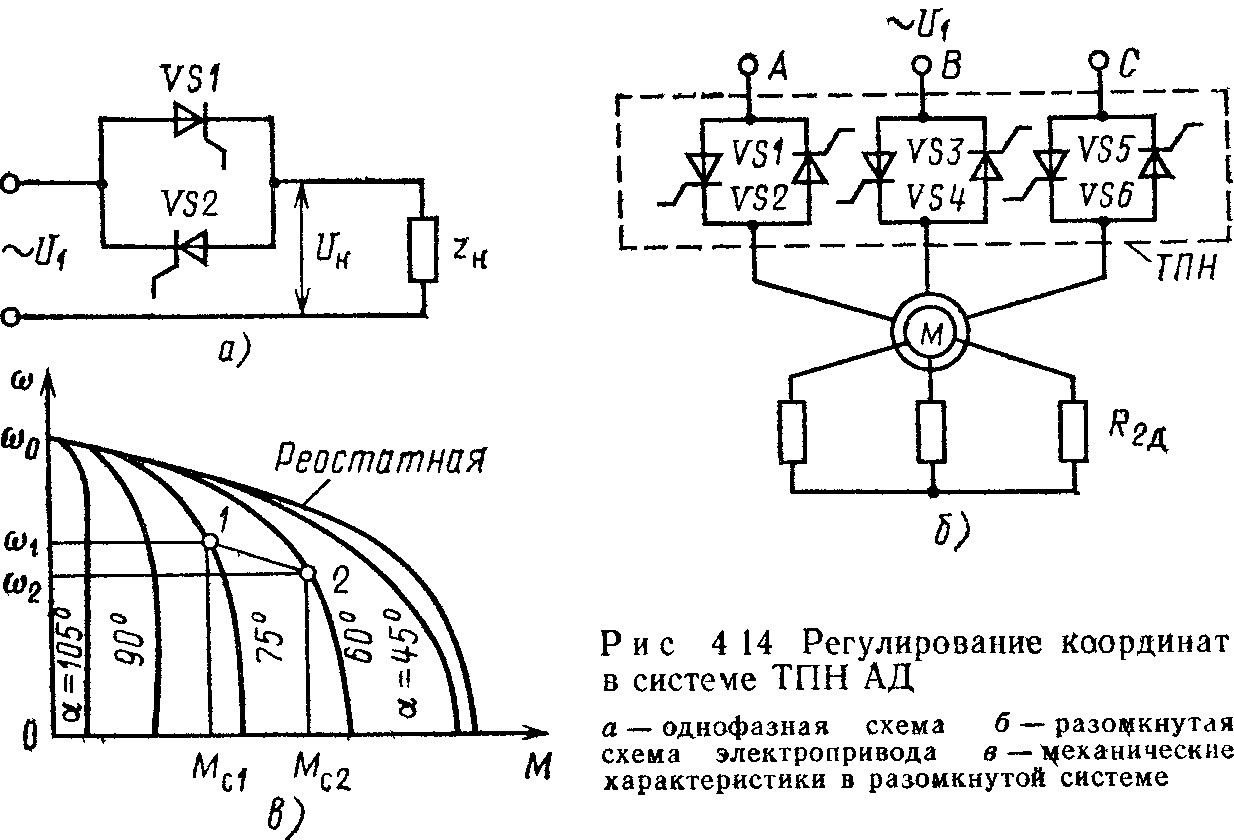
34 Асинхронный электропривод с тиристорным регулятором напряжения.
Рассмотрим работу схемы при увеличении нагрузки на валу АД. Пусть при скорости АД 1 таким образом подобраны задающий сигнал Uз,с и сигнал обратной связи етг, что угол управления равен 75° (рис.4.15, в). Тогда при моменте сопротивления Mс1 АД будет работать в точке 1. При увеличении нагрузки на валу АД до значения Мс2 скорость АД начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора етг~. Уменьшение етг вызывает увеличение напряжения управления Uy, что определит уменьшение с помощью СИФУ угла управления до значения =60°. Двигатель при этом станет работать в точке 2 на характеристике, соответствующей =60°. При этом угловая скорость 2 будет меньше, чем 1, однако путем соответствующего выбора тахогенератора и параметров СИФУ можно получить достаточно жесткие механические характеристики, например характеристику вида 1–2. Изменяя с помощью потенциометра ЗП значение задающего напряжения Uз,с, можно получить ряд механических характеристик электропривода, показанных на рис. 4.15, б. Из рис. 4.15, б следует, что эти характеристики имеют относительно высокую жесткость и перегрузочную способность и позволяют обеспечить большой диапазон регулирования скорости АД.
|
35 Частотный вентильный асинхронный электропривод.
Принцип заключается в изменении скорости х.х. при изменении частоты. Этот способ обеспечивает плавное регулирование в широком диапазоне, высокую жесткость получаемых механ. х-к, регулирование скорости не сопровождается увеличением скольжения, поэтому потери мощности при регулировании скорости оказываются не большими. ωо=2nf1/p U1~E1=√2 π(w1ko)f1Ф, Где w 1 – число витков фазы обмотки статора; Ко – обмоточный коэффициент АД; f1 – частота сети; Ф – магн. поток в в воздушном зазоре АД. Из этого следует, что работа АД в режиме частотного упр-я нри неизменном напряжении не возможна. 1) Мс=const; U/f=const. 2) Мс=сω²; U/f²=const. 3) Мс=с/ω; U/√f= const.
|
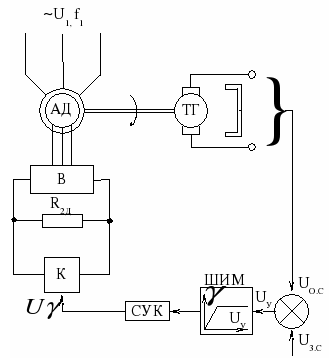
36 Асинхронный электропривод с импульсным регулированием добавочного сопротивления. Сущность метода заключается в периодическом (импульсном) изменении какого-либо параметра цепей АД или питающей сети.
Параллельно резистору включен управляемый ключ К (коммутатор). Управление ключом происходит от широтно-импульсного модулятора ШИМ, на вход которого поступают сигналы задания U3.C и обратной связи Uo.c по скорости. При поступлении на вход ШИМ сигнала ошибки Uy = UЗ.С – UОС он начинает генерировать импульсы управления. Эти импульсы с помощью схемы управления ключом СУК распределяются по тиристорам ключа и вызывают периодическое включение и закорачивание резистора R2 . Принцип получения жестких характеристик ЭП состоит в следующем. Допустим, что АД работает в установившемся режиме при каком-то заполнении ключа К, чему соответствует эквивалентное сопротивление цепи ротора. Пусть по каким-то причинам произошло увеличение момента нагрузки АД, в результате чего начнет снижаться его скорость. Тогда сигнал управления Uy начнет повышаться, что вызовет увеличение заполнения работы ключа К и уменьшение тем самым эквивалентного сопротивления в цепи ротора. Это, в свою очередь, приведет к увеличению тока в роторе и момента АД и прекращению снижения скорости, что соответствует жестким характеристикам ЭП.
|
|
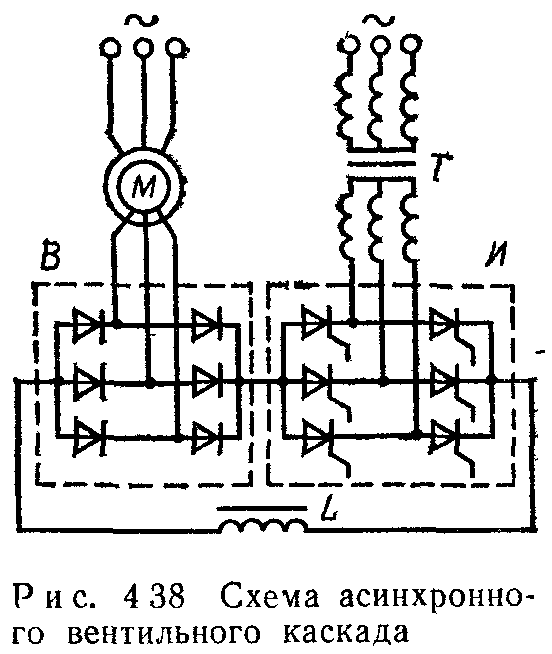
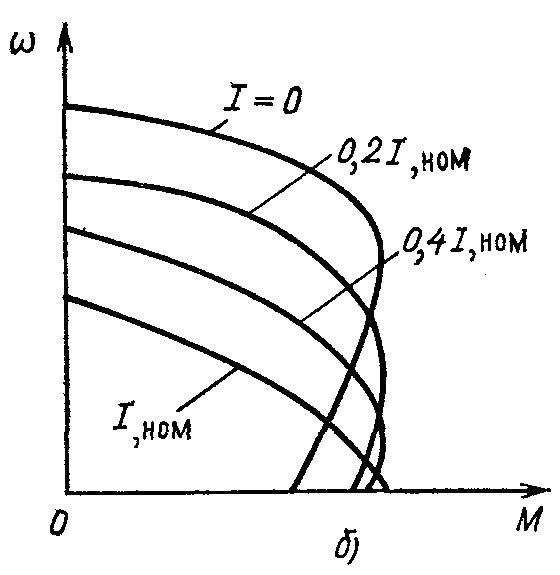
37 Асинхронный вентильный каскад.
В роторную цепь АД включены полупроводниковые неуправляемые вентили выпрямителя В и управляемые вентили инвертора И, а также реактор L (катушка индуктивности), который служит для сглаживания пульсаций выпрямленного тока. Электродвижущую силу инвертора можно регулировать. Отметим основные показатели регулирования скорости АД в каскадных схемах включения. Практический диапазон регулирования скорости в каскадных схемах обычно не превышает двух. Вызвано это тем обстоятельством, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать установленную мощность всех устройств в роторной цени АД. Плавность регулирования скорости в каскадных схемах достаточно высокая, что достигается плавным изменением ЭДС ПЧ. При каскадном регулировании скорости коэффициент мощности привода относительно невелик. В целом каскадный способ является экономичным способом регулирования скорости АД.
|
41 Датчики линейных перемещений.
Датчик линейного перемещения — это прибор, предназначенный для определения величины линейного перемещения какого-либо объекта. По принципу действия датчики перемещения могут быть: Емкостными Оптическими Индуктивными Вихретоковыми Ультразвуковыми Магниторезистивными Потенциометрическими Магнитострикционными На основе эффекта Холла
|
|