

2. Ультразвуковые системы позиционирования
В системе ультразвукового трекинга передатчики расположены на движущемся реальном объекте, а приемники образуют антенну (в некоторых системах передатчики и приемники меняются местами). Всякий раз, когда передатчик посылает сигнал, его принимают статичные сенсоры, измеряющие время между отправлением и приемом сигнала. По времени задержки рассчитываются расстояния между излучателями и приемниками. По полученным расстояниям вычисляются трехмерные координаты объекта в системе.
Ультразвуковой трекинг используется в изделиях фирмы RUCAP, InterSense.
2.1. Система позиционирования UM-16
Принцип работы системы позиционирования UM-16 основан на точном измерении времени прохождения ультразвукового сигнала от мобильного модуля излучателя до нескольких приемных модулей. Модуль управления осуществляет синхронизацию работы всего устройства и передачу данных с приемников на компьютер.
Система требует проведения однократной первоначальной настройки с помощью дополнительного модуля калибровки и сервисного программного обеспечения.
Есть специальное направление для использования систем позиционирования в медицине: тренажеры для реабилитации пациентов, страдающих остеохондрозом и перенесших инсульт, а также тренажеры для спортивной медицины. Система UM-16 позволяет записать движение пациента и углы работы его суставов, с последующим воспроизведением и программным статистическим анализом. Сравнивая диаграммы и статистически вычисленные на их основе параметры можно судить о прогрессе восстановительного процесса.
Характеристики и состав системы UM-16(Таб.1):
Таб.1
|
Количество степеней свободы |
6 (X, Y, Z, азимут, тангаж, крен) |
|
Система координат |
абсолютная |
|
Точность определения координат Точность определения углов |
± 0,5 мм ± 0,5° |
|
Число модулей излучателя |
от 1 до 16 |
|
Рабочая область |
до 400 кв. метров |
|
Частота измерений |
100 Гц |
|
Рабочий диапазон расстояний между модулем излучателя и приемными модулями |
0,05 – 3,0 м |
2.2. Беспроводная система K-Motion Interactive K-Vest System для анализа свинга в гольфе от InterSense
Система K-Motion Interactive K-Vest использует три датчика InertiaCube. Датчик InertiaCube представляет собой микроэлектромеханическую систему и использует передовой алгоритм фильтра Калмана. Характеристики: 3D трекинг с углом обзора 360 °, точность – 1°, частота оценивания – 200 Гц, 2000° максимальный угловой диапазон, подстраиваемые выходные фильтры и чувствительность к вращению, инструменты для компенсации статического магнитного поля. Данная система работает от перезаряжаемой батареи, которая питает датчик InertiaCube. Данные, поступающие с датчиков передаются беспроводным путем на персональный компьютер и обрабатываются программным обеспечением Kinesync для немедленного формирования сигнала обратной связи.

Рис. 5 Датчик InertiaCube
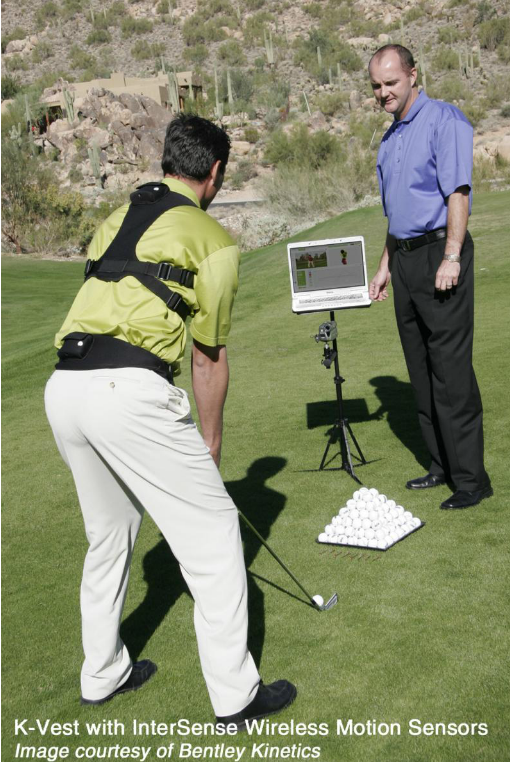
Рис.6 K-Motion Interactive K-Vest System
Ультразвуковые системы оценки качества движения человека имеют хорошую точность измерения координат и углов, но поскольку такие системы работают на основе использования физических свойств ультразвука, они обладают некоторыми недостатками. Во-первых, это необходимость прямой видимости между излучателями и приемниками, поскольку посторонние предметы являются хорошими поглотителями или рассеивателями ультразвука. Во-вторых, снижение точности при изменении температуры и при порывах ветра. А также необходимость точной калибровки приемников.