

15 Навигация_mod
.pdfОсновы навигации
Приборы для измерения скорости хода судна.
Лаг – прибор для измерения скорости судна и пройденного им расстояния.
Абсолютные лаги
– показывают скорость и пройденное расстояние относительно грунта.
Гидроакустические лаги
- принцип их работы основан на использовании эффекта Доплера. Импульс ультразвуковых колебаний, посылаемых с судна, отражается от грунта и возвращается обратно к судовому приемнику лага. При движении судна частота
принятого сигнала будет отличаться от излучаемой в зависимости от скорости хода.
Лаги всех систем
не могут давать абсолютно точных показаний!!!
Они требуют периодической выверки и регулировки. Та часть погрешности в показаниях лага, которая не может быть скомпенсирована, определяется
на «мерной линии».
Основы навигации
Истинный горизонт и его деление.
Для ориентирования в море принята система условных линий и плоскостей
наблюдателя.
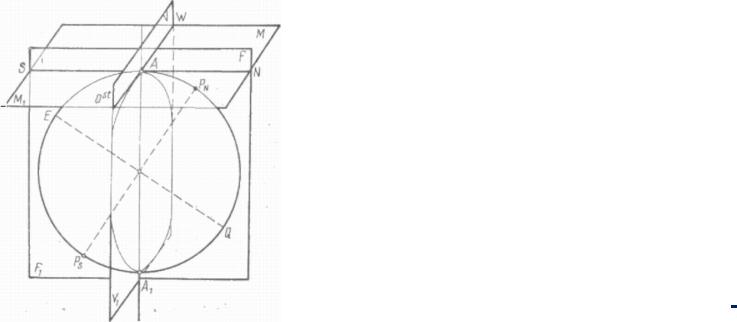
Наблюдатель находится в точке А,
глаз наблюдателя на некоторой высоте е (<<R).
Линия АА1, проведенная через место наблюдателя и центр
земного шара, называется отвесной линией.
Горизонтальная плоскость, проходящая через глаз наблюдателя , называется
плоскостью истинного горизонта наблюдателя.
Вертикальная плоскость FF1, проходящая через место
наблюдателя и земную ось PNPS, называется
плоскостью истинного меридиана.
В пересечении этой плоскости с поверхностью Земли образуется большой круг,
называемый истинным меридианом наблюдателя.
Прямая полученная при пересечении плоскости истинного горизонта с плоскостью
истинного меридиана, называется
линией истинного меридиана или полуденной линией (N-S).
Вертикальная плоскость VV1, перпендикулярная плоскости истинного меридиана, в пересечении с плоскостью истинного горизонта образует линию Е-W.
Основы навигации
Дальность видимого горизонта.
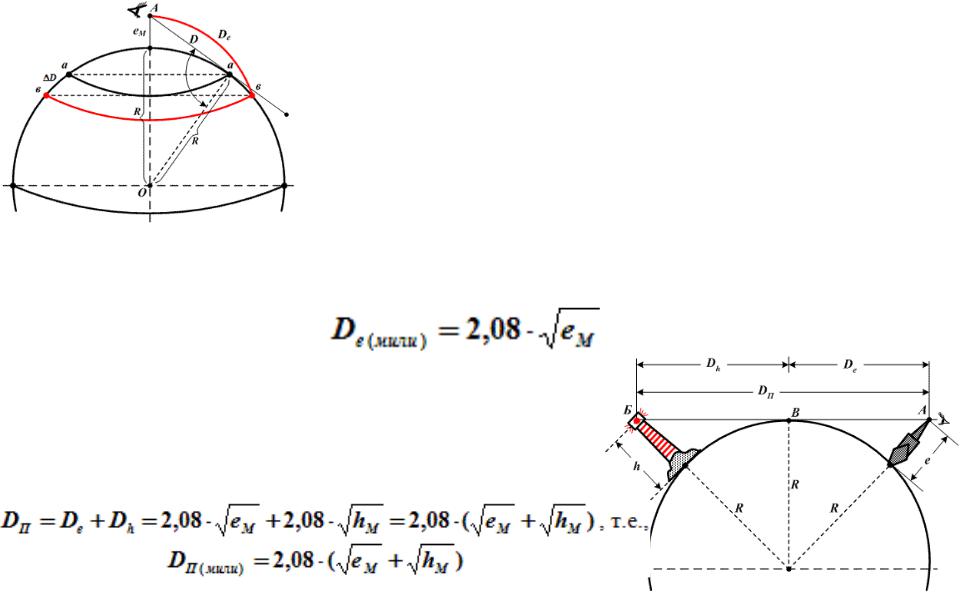
Если глаз наблюдателя находится на высоте еМ над уровнем
моря, то луч зрения идущий по касательной к земной
поверхности, определяет на земной поверхности
малый круг а-а, радиуса D.
Это было бы верно, если бы Землю не окружала атмосфера!!!
Под действием земной рефракции
наблюдатель видит горизонт дальше (по кругу в-в).
Если принять дальность видимого горизонта De в милях, а высоту глаза наблюдателя еМ
в метрах, то формула для расчета дальности видимого горизонта имеет вид:
Дальность видимости предмета (ориентира),
имеющего высоту над уровнем моря hМ, с высоты глаза наблюдателя над уровнем моря еМ будет выражаться формулой:
Основы навигации
Дальность видимости предметов.
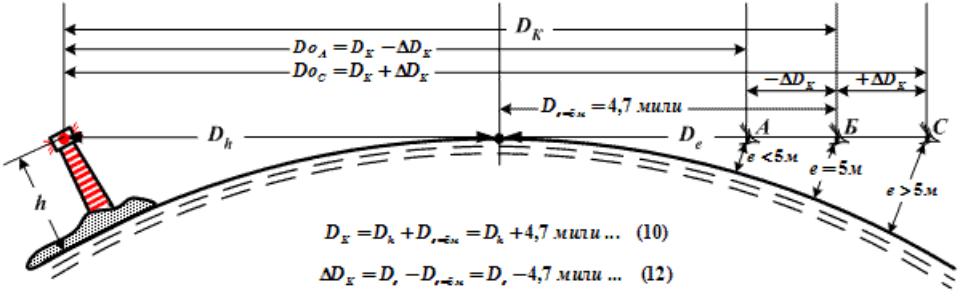
На навигационных морских картах и в навигационных пособиях дальность видимости
огня ориентира дана для высоты глаза наблюдателя над уровнем моря е = 5 м.
С такой высоты De равна 4,7 мили. При е, отличной от 5 м, следует вносить поправку.
DK = Dh + De=5м = Dh + 4,7 мили
При е, отличной от 5 м то для определения дальности видимости огня ориентира необходимо к дальности, показанной на карте, прибавить (если е > 5 м), или отнять (если е < 5 м) поправку к дальности видимости огня ориентира (ΔDK).
Основы навигации
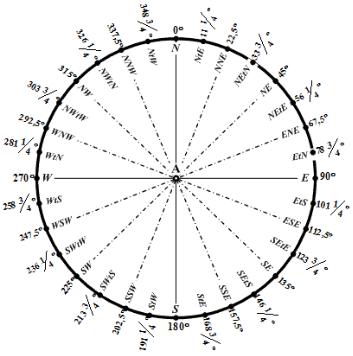
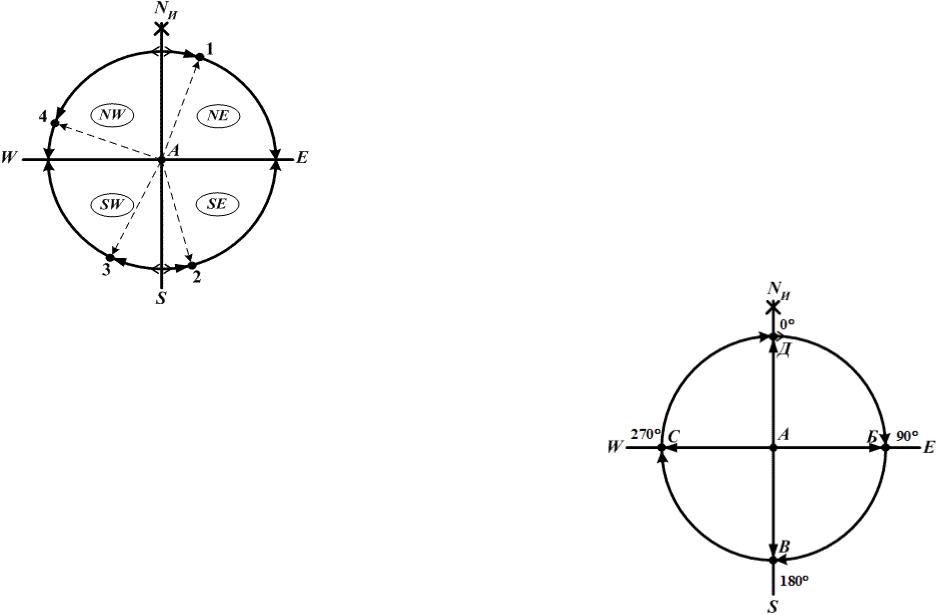
Румбовая система деления истинного горизонта.
Плоскость истинного горизонта делится
полуденной линией (N-S) и линией (Е-W)
на четыре четверти: NО , SO, SW и NW.
Направления N, S, Ost , W считаются
главными румбами.
Четвертные румбы (NO, SO, SW, NW),
делят каждую четверть горизонта пополам.
Восемь трехбуквенных румбов
(NNO, ONO, OSO, SSO, SSW, WSW, WNW, NNW),
являются средними направлениями между
главными и четвертными.
Названия 16 промежуточных румбов составляется из букв ближайшего главного или четвертного румба с прибавлением слова «тэн», которая означает предлог «к», обозначаемого буквой t и буквы главного румба, в сторону которого данный промежуточный румб направлен (например, NtO, NOtN и т. д.).
Угол между двумя смежными румбами составляет 11° 1/4
Основы навигации
Четвертная и круговая системы деления истинного горизонта.
В четвертной системе:
счет направлений ведется от северной (N) и южной (S) части полуденной линии в сторону востока (Е)
и в сторону запада (W) в пределах от 0° до 90°.
Числовому значению направления дается наименование,
соответствующее наименованию четверти.
Например: NE 10°, SE 10°; SW 30°; NW 70°.
В круговой системе:
-горизонт делится на 360°;
-счет направлений ведется от 0°до 360°;
-счет направлений ведется от северной части
полуденной линии NИ вправо по ходу часовой стрелки.
Тогда направления: • на т. Б – 90°; • на т. В – 180°;
• на т. С – 270°; • на т. Д – 360° или 0°.
Основы навигации
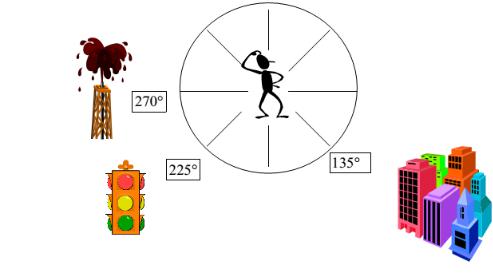
Принцип ориентирования
0º = 360º
Наблюдатель – в центре круга.
Часть рисунка, где написано 360º= 0º
– определяет направление на север.
Нетрудно заметить, что:
- фонтан находится напротив 270º, - светофор находится напротив 225º, - дома – напротив 135º.
Понятие принцип ориентирования:
-круг состоит из 360 градусов;
-мы условно всегда находимся в центре такого воображаемого круга;
-круг началом своего отсчёта всегда смотрит на север (0 = 360 градусов);
-когда мы смотрим на север, мы смотрим на 0 градусов;
-в это время слева у нас – запад (или 270 градусов),
-справа – восток (или 90 градусов),
-сзади – юг (или 180 градусов);

Основы навигации
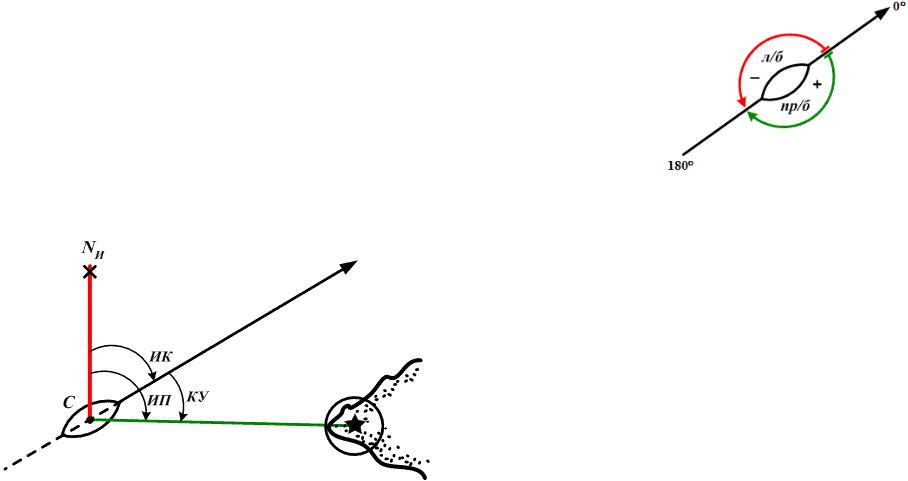
Истинные направления.
Деятельность судоводителя в море связана с:
-определением направления движения судна;
-определением направлений на объекты.
Направление движения судна характеризуется его
истинным курсом.
Истинный курс – это направление, в котором идет судно.
Представляет собой горизонтальный угол между северной частью
истинного меридиана и носовой частью продольной оси судна.
Истинный курс судна измеряется 0° до 360° (по часовой стрелке)
и обозначается – как ИК.
Направление на объект определяется:
1.относительно носовой части продольной оси судна
-курсовой угол,
2.относительно северной части истинного меридиана
-истинный пеленг.
Истинный пеленг (ИП) - горизонтальный угол между северной
частью истинного меридиана и направлением из точки наблюдения на объект.
Истинный пеленг измеряется от 0° до 360° (по часовой стрелке)
и обозначается – как ИП.
Основы навигации
Курсовой угол.
Существует ещё один вид направлений – это курсовые углы (КУ).
Курсовой угол - горизонтальный угол между носовой частью продольной оси (ДП ) судна и направлением из
точки наблюдения на объект.
Отсчёт производится от диаметральной плоскости судна в обе стороны, правую и левую, от нуля до 180°.
Пример определения КУ:
Мысленно делим горизонт на градусы.
Но только начало отсчёта – ноль
градусов, будет не на севере, а прямо по носу нашего судна.
Прямо у нас – ноль, точно слева и точно справа – по 90°. .
Направление на остров, отсчитываемое в градусах от нуля до 180 с указанием стороны отсчёта – это и есть
курсовой угол.
Основы навигации
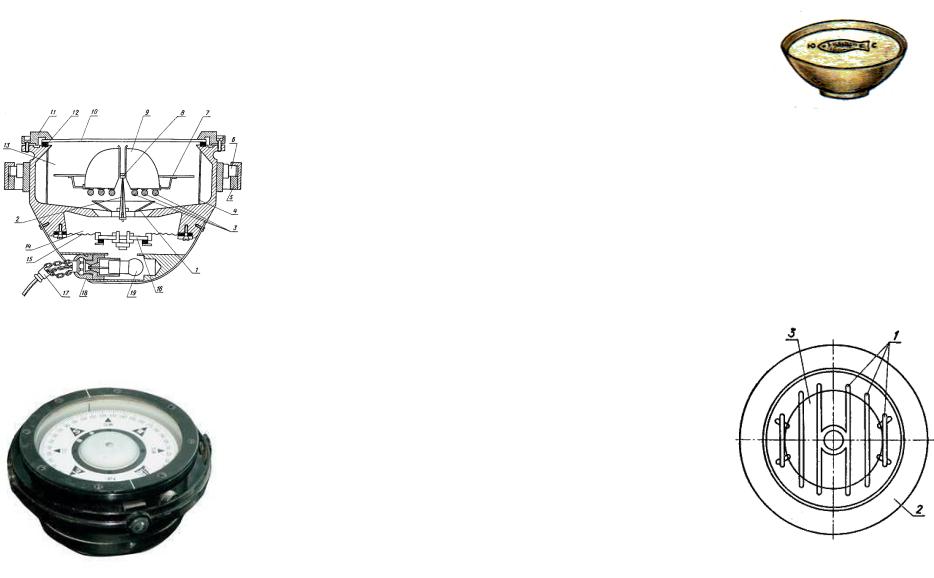
Магнитный компас.
Для решения большинства навигационных задач штурману необходимо
определять направление на Северный географический полюс Земли.
С древних времён для этого применялся свободно подвешенный
намагниченный кусочек железа, имеющий продолговатую форму –
прообраз современных магнитных компасов.
Магнитный компас состоит из картушки и котелка.
Котелок компаса представляет собой латунный резервуар, наполненный компасной жидкостью (43-процентный раствор этилового спирта в дистиллированной воде).
Верхняя часть котелка закрыта стеклом.
Нижняя часть котелка закрыта латунной чашкой с грузом.
В резервуаре на компасной шпильке расположена картушка.
Картушка является чувствительным элементом магнитного компаса и состоит из:
- магнитной системы,
-латунного поплавка с топкой,
-латунного ободка, на котором
закреплен диск с градусными делениями.