

1 Исходные данные к курсовой работе
|
Параметр |
Обозначение параметра |
Единицы СИ |
Числовые значения параметров |
|
Средняя скорость ползуна 3 |
υср |
м/с |
5,28 |
|
Частота вращения кривошипа ОА |
n1 |
об/мин |
1320 |
|
Отношение длины шатуна АВ к длине кривошипа ОА |
=ℓАВ/ℓОА |
— |
3,5 |
|
Номера положений механизма для построения планов ускорений |
— |
— |
2; 3; 10 |
|
Диаметр поршня первой ступени |
DI |
м |
0,16 |
|
Диаметр поршня второй ступени |
DII |
м |
0,12 |
|
Максимальное индикаторное давление второй ступени цилиндра |
РIImax |
МПа |
4 |
|
Масса поршня 3 |
m3 |
кг |
22 |
|
Коэффициент неравномерности движения механизма |
|
— |
0,05 |
|
Число зубьев в шестерни |
Zа |
— |
13 |
|
Число зубьев колеса |
Zв |
— |
21 |
|
Передаточное отношение планетарного редуктора |
U1Н |
— |
10,18 |
У в - схема планетарного редуктора, д – схема кулачкового механизма, г - параболический закон движения толкателяказания.
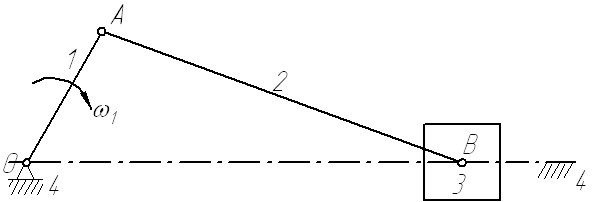
За начало отсчета принять положение, при котором ползун 3 находится в крайнем левом положении.
Центры масс звеньев расположены в точках S1, S2. Положение точки S2 находится из условия AS2=0,28AB.
Приведённый момент от сил сопротивления величина постоянная
 =const.
=const.Расчет сил давления газов рассчитать для II-ой ступени.
Угол давления в кулачковом механизме =450.
Модуль для зубчатой передачи m = 10 мм.
Тип зацепления – неравносмещенный.
2 Структурное исследование рычажного механизма
ОА
– 1 звено – кривошип;
АВ
– 2 звено – шатун;
т. В–
3 звено – ползун;
4 звено - стойка,
опора.
Степень подвижности механизма
n = 3;
р5 = 4; р4 = 0.
![]() .
.
Структурная группа 2-3
К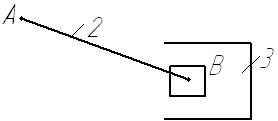 оличество
степеней подвижностиW2-3
= 3n – 2p5
– p4
= 0 (n = 2, p5
= 3, р4
= 0).
оличество
степеней подвижностиW2-3
= 3n – 2p5
– p4
= 0 (n = 2, p5
= 3, р4
= 0).
![]() 2 вид.
2 вид.
Механизм I класса (ведущее звено)
 W
= 3n – 2p5
– p4=
1 (n = 1, р5
= 1).
W
= 3n – 2p5
– p4=
1 (n = 1, р5
= 1).
![]()
Структурная формула всего механизма
![]()
![]()
![]()
Вывод: Данный механизм II класса.
3 Кинематическое исследование рычажного
МЕХАНИЗМА
3.1 Синтез рычажного механизма.
Построение схемы механизма
Согласно исходным данным имеем:
υcp =5,28 м/с;
=
 =
3,5;
=
3,5;n1 = 1320 об/мин.
Определим ход поршня Smax и длины звеньев ℓАВ, ℓОА

Масштабный коэффициент схемы механизма
Рассчитаем расстояние до цента масс
![]()
Строим механизм в 6- положениях, начиная с крайнего левого (согласно заданию).
3.2 Построение планов скоростей
Угловая скорость кривошипа
![]() .
.
Линейная скорость ползуна
υA
=
![]() .
.
Масштабный коэффициент плана скоростей
![]() .
.
После построения планов рассчитываем действительные значения скоростей по формулам
![]() ;
;
![]() ;
;
![]() .
.
Полученные значения запишем в таблицу 3.1.
Таблица 3.1 - Значения скоростей, угловых скоростей
|
Параметры |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
vB |
0 |
2,8 |
5,4 |
8,28 |
7,8 |
4,9 |
0 |
4,9 |
7,9 |
8,28 |
6,0 |
3,6 |
|
vBA |
8,28 |
7,0 |
4,0 |
0 |
4,0 |
7,0 |
8,28 |
7,0 |
4,4 |
0 |
4,4 |
7,0 |
|
|
39,4 |
33,3 |
20,9 |
0 |
20,9 |
30,3 |
39,4 |
30,3 |
20,9 |
0 |
20,9 |
30,3 |