

7
Комплексное однополюсное звено является базовым при построении комплексных ЦФ высокого порядка.
При rp = 1 звено превращается в генератор незатухающего комплексного гармонического сигнала y(n) = cosλ pn + jsinλ pn (синус – косинусный генератор) [15, 56]. Для его внешнего возбуждения достаточно на вход реальной составляющей подать единичный импульс xRe(n) = 1 при n = 0. Возможно также самовозбуждение звена при задании следующих начальных условий
разностного уравнения: yRe(− 1) = 1, yIm(− 1) = 0.
Особенностью данного цифрового генератора является нарастание шума квантования на его выходе, вызываемого конечной разрядностью умножите-
ля qr (процессора ЦОС). Шуму квантования умножителя er(n), условно пока-
занному на рис. 6.2, с дисперсией σ e2 = 2− 2qr /12 соответствует дисперсия шума квантования на выходе звена, определяемая квадратом модуля его импульсной характеристики h(n) = exp(jλ pn):
σ eвых2 = ( 2− 2qr /12 ) ∑n |h( l )|2 = ( 2− 2qr /12 )n .
l = 0
Как видим, дисперсия шума возрастает пропорционально номеру отсчета n, а среднеквадратичное значение – пропорционально √ n :
σ eвых = ( 2− qr / 12 )
12 )  n .
n .
Если задаться разрядностью умножителя qr, допустимым среднеквадратичным значением выходного шума σ e выхдоп = 2− qy/√ 12, соответ-
ствующим разрядности выходного кода qy, то можно найти номер отсчета n, при котором шум квантования достигнет допустимого значения. Так, при qr =32 бита, qy = 16 бит, n = 232 . При частоте дискретизации fд = 64000 Гц это соответствует времени 216 секунд. Через определяемые таким образом интервалы времени нужно принудительно возвращать генератор в исходное состояние. Во избежание нежелательных скачков сигнала это целесообразно делать в моменты перехода через нуль его синусоидальной составляющей
[56].
6.4.СГЛАЖИВАЮЩИЕ ЦИФРОВЫЕ ФИЛЬТРЫ
Кспециализированным сглаживающим фильтрам, которые рассматриваются в данном параграфе, относятся рекурсивный фильтр экспоненциального весового усреднения, нерекурсивные фильтры на основе различных весовых функций – однородный, триангулярный и другие, нерекурсивные фильтры на основе параболической аппроксимации, медианный фильтр. Они использу-
ются для подавления аддитивных ВЧ-составляющих, высших гармоник и шумов и выделения медленно изменяющейся полезной составляющей, например, на выходе цифрового или аналогового детектора или демодулятора.
8
6.4.1. РЕКУРСИВНЫЙ ФИЛЬТР ВЕСОВОГО ЭКСПОНЕНЦИАЛЬНОГО УСРЕДНЕНИЯ
Рекурсивное звено первого порядка (рис. 6.4) с вещественными коэффициентами b0 , a1, связанными соотношением: b0 =1/µ , a1=− (µ - 1)/µ =− 1+ b0 , в соответствии с его разностным уравнением
y(n) = b0 x(n) − a1 y(n − 1) = (1 /µ ) x(n) + [(µ − 1)/µ ] y(n − 1)
реализует так называемый алгоритм экспоненциального весового усреднения или сглаживания [36, 53]. Параметром его является коэффициент сглаживания µ > 1.
x(n) |
|
|
|
y(n) |
|||||
|
|||||||||
|
X |
|
|
∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
1/µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
z− 1 |
|
|
|||
Xy(n− 1)
−(1− µ )/µ
Рис. 6.4. Структурная схема сглаживающего рекурсивного звена
Если представить сигналы на входе и выходе звена в виде суммы их математического ожидания (МО) и случайной аддитивной помехи:
x(n) = M[x(n)] + ex(n), y(n) = M[y(n)] + ey(n), то в случае идеального сглажи-
вающего фильтра выходной сигнал y(n) должен являться несмещенной оценкой МО входного сигнала: M[y(n)] = M[x(n)], а его дисперсия D[y(n)] = D[ey(n)] должна быть минимальной в соответствии с критерием минимума среднего квадрата ошибки (СКО). Используя разностное уравнение звена, можно найти связь между МО и дисперсией его выходного и входного сигналов:
M[y(n)] = (1 /µ ) M[x(n)] + [(µ |
- 1)/µ ] M[y(n − 1)] ; |
D[y(n)] = (1 /µ 2)D[x(n)] + [(µ− |
1)/µ ]2D[y(n − 1)] . |
Как видим, в общем случае M[y(n)] ≠ M[x(n)], т. е. выходной сигнал является смещенной оценкой МО входного сигнала. Cогласно [36] это смещение
при n ≤ µ определяется выражением M[y(n)] = M[x(n)][1− |
(µ - 1)n/µ n] и со- |
|
ставляет до 36,8 %. При n >> |
µ , т. е. в установившемся режиме, справедливы |
|
допущения: M[y(n − 1)] ≈ |
M[y(n)], D[y(n − 1)] ≈ D[y(n)], |
при которых |
M[y(n)] ≈ M[x(n)] − смещение оценки с ростом n стремится к нулю, а дисперсия ее: D[y(n)] = D[x(n)] /(2µ − 1) в (2µ − 1) раз меньше дисперсии входного сигнала (в том числе и при n = µ [36]. По эффективности, т. е. дисперсии, оценка экспоненциального сглаживания при n = µ почти в 2 раза лучше оценки линейного сглаживания, для которой D[y(n)] = D[x(n)] /n . Таким об-

9
разом, чем больше µ , тем меньше случайная погрешность оценки, но больше ее систематическая погрешность при значениях n, соизмеримых с µ , и медленнее ее убывание во времени, т. е. с ростом n. Физически это означает возрастание инерционности и ухудшение способности фильтра отслеживать изменения входного сигнала (множитель 1/µ перед x(n)).
Отклик фильтра на единичный импульс при n = 0, 1, … равен: y(0) = 1/µ ,
y(1) = (1/µ )[( µ - 1)/µ ], y(2) = (1/µ )[( µ |
- 1)/µ |
|
] 2, что соответствует импульс- |
||||||
|
|
1 |
|
µ − 1 |
|
n. При µ ≥ (5 – 10) множитель |
|||
ной характеристике фильтра |
h( n )= |
|
|
|
|
|
|||
|
|
|
|||||||
|
|
µ |
|
µ |
|
|
|
|
|
[(µ - 1)/µ ] n стремится к e-n/ |
|
|
|
|
|
|
|
||
и импульсная характеристика принимает вид |
|||||||||
экспоненциальной весовой функции h( n ) ≈ |
|
1 |
e |
− n / µ |
. Это объясняет назва- |
||||
|
µ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
ние данного фильтра и реализуемого им алгоритма экспоненциального усреднения или взвешивания.
Фильтр имеет вещественный полюс rp = (µ |
− 1)µ |
<1 и описывается пере- |
|||||
даточной функцией и АЧХ вида: |
|
|
|
|
|||
|
1/ |
|
1 |
|
|
1 |
|
H( z )= 1− |
µ − 1 |
z− 1 ; | H( jλ )|= |
| µ |
− ( µ − 1)e− jλ |
| |
= |
1+ 2µ ( µ − 1)(1− cos λ ) . |
|
|
||||||
µ |
|
|
|
|
|
|
|
С ростом µ уменьшается полоса пропускания фильтра. Поэтому в следящих системах значение µ задают небольшим в режиме установления или захвата и увеличивают его в режиме слежения.
Предлагается самостоятельно построить и проанализировать графики АЧХ и импульсной характеристики фильтра.
6.4.2. НЕРЕКУРСИВНЫЕ СГЛАЖИВАЮЩИЕ ФИЛЬТРЫ НА ОСНОВЕ ВЕСОВЫХ ФУНКЦИЙ
Нерекурсивный фильтр осуществляет линейное сглаживание сигнала в
|
1 |
N − 1 |
||
соответствии с алгоритмом весового усреднения: у( n )= |
∑ w( m )x( n − m ), |
|||
|
|
|||
|
U m= 0 |
|||
где U – масштабирующий множитель, зависящий от вида весовой функции w(m). Такой алгоритм обеспечивает несмещенную оценку входного сигнала: M[y(n)] = M[x(n)]. Прямоугольной весовой функции соответствует алгоритм
|
|
1 |
N − 1 |
|
скользящего среднего |
у( n )= |
∑ x( n − m ) с минимальной (для белого шу- |
||
|
||||
|
|
N m= 0 |
||
ма) дисперсией оценки Dy = Dx / N. Такой фильтр называют однородным [40], так как все сглаживаемые отсчеты у него имеют одинаковые веса, рав-
10
|
|
|
|
|
|
|
|
1 |
N − 1 |
|
ные единице. Его передаточная функция |
H( z )= |
∑ z− m может быть пре- |
||||||||
|
||||||||||
|
|
|
|
|
z− N |
|
|
N m= 0 |
||
образована к виду |
H( z )= |
1 1− |
, |
которому |
отвечает разностное |
|||||
|
|
|
|
|||||||
N 1− |
z− 1 |
|||||||||
|
|
|
|
|
|
|||||
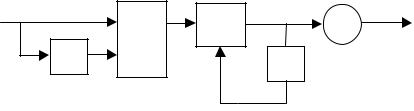
уравнение y(n) = N-1[x(n) – x(n – N) + y(n – 1) (см. п. 5.6.4). Структура реа-
лизуемого в соответствии с ним фильтра (рис. 6.5) содержит нерекурсивную и рекурсивную части и при больших N требует намного меньшего объема вычислений.
x(n) |
+ |
|
|
1/N |
y(n) |
∑ |
|
|
|||
|
∑ |
X |
|
||
|
|
|
|||
|
z− N |
|
|
z− 1 |
|
|
− |
|
|
|
|
|
|
|
|
y(n− 1) |
|
Рис. 6.5. Структурная схема сглаживающего рекурсивного звена
Однако в данном случае невозможно прореживание выходного сигнала в процессе обработки, предоставляемое алгоритмом на основе ДВС [11, 40]. Коэффициент прореживания для сглаживающих НФ на основе ДВС может достигать значения, равного N.
Другие весовые функции имеют более широкую по сравнению с прямоугольной шумовую полосу и менее эффективны относительно белого шума. Однако они лучше подавляют сосредоточенные или узкополосные помехи вне главного лепестка частотной характеристики весовой функции, определяющей частотную характеристику сглаживающего НФ (см. п.п. 3.3.3, 3.3.4). Важные для задач сглаживания параметры весовых функций приводятся в
[11, 36, 58].
НФ с прямоугольной и треугольной весовыми функциями (последний фильтр называют еще триангулярным) применяют также в качестве фильт- ров-интерполяторов соответственно нулевого и первого порядка в восходящих дискретных системах, т. е. системах с повышением частоты дискретизации [11, 40]. В случае нулевого (или ступенчатого) интерполятора недостающие (нулевые) отсчеты входного сигнала на каждом интервале интерполяции ТД′ замещается в выходном сигнале (L – 1)-м узловым значением входного сигнала на границе интервала интерполяции. Здесь L = ТД′ / ТД соответствует коэффициенту повышения частоты дискретизации и длине импульсной характеристики фильтра N. При интерполяции по линейному закону длина треугольной импульсной характеристики фильтра вдвое превышает коэффициент передискретизации сигнала L: N = 2L. Линейную интерполяцию сигнала можно выполнить также с помощью двух каскадно включенных интерполяторов нулевого порядка.