

Ортографические проекции
При ортографическом проецировании визуальная плоскость совпадает с одной из координатных плоскостей либо параллельна ей.
Матрица проецирования
вдоль оси Z на плоскость X/Y имеет вид:

Матрица проецирования Qx вдоль оси X на плоскость Y/Z и матрица проецирования QY на плоскость Z/Х имеют вид:

Аксонометрия
При аксонометрическом проецирования проектирующие прямые перпендикулярны визуальной плоскости, а нормаль визуальной плоскости не перпендикулярна ни одной из координатных плоскостей.
В соответствии с взаимным расположением плоскости проецирования и координатных осей различают:
изометрию – все три угла между нормалью визуальной плоскости и координатными осями равны;
диметрию – два угла между нормалью визуальной плоскости и координатными осями равны;
т
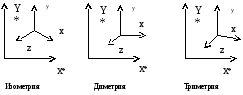 риметрию
– нормальный вектор визуальной плоскости
образует с координатными осями три
различных угла.
риметрию
– нормальный вектор визуальной плоскости
образует с координатными осями три
различных угла.
Изометрия и диметрия
В изометрической проекции координатные оси объекта отображаются на визуальную плоскость под углом 1200, а масштабные коэффициенты по всем трем осям одинаковы.
Для диметрической проекции оси Y и X проецируются параллельно осям Y* и X* визуальной плоскости, а проекция оси Z совпадает с биссектрисой угла между осями Y* и X*. Причем коэффициент искажения по оси Z равен ½ (отношение длины проекции к длине отрезка).
Таким образом, матрица изометрического проецирования Qи и матрица диметрического проецирования Qд имеют вид:
![]()

Перспективные
проекции![]()
Предположим, что центр проецирования лежит на оси Z в точке "с" (0,0,с) и плоскость проецирования совпадает с координатной плоскостью Y/X. Возьмем в пространстве произвольную точку и проведем через нее и точку "с" прямую.
Т огда
огда
![]() Матрица
перспективного преобразования
записывается в виде:
Матрица
перспективного преобразования
записывается в виде:
 ,
,
где точка "с" называется точкой схода.
В общем виде, когда оси координатной системы не параллельны визуальной плоскости, матрица QП содержит три точки схода (-a,0,0), (0,-b,0) и (0,0,-c) на осях X, Y и Z соответственно, т.е. всего может быть не более 3-х точек схода (по одной на каждой оси). В этом случае матрица QП имеет вид:

 .
.

Работу глаза можно описать достаточно точно геометрически, однако зрительное восприятие не создается только глазом. Зрительное восприятие в большей степени создается мозгом. Он "расширяет", "сжимает" с различной интенсивностью разные фрагменты изображений, получаемых на сетчатке, и создает образ 3-х мерного пространства. Этот образ позволяет человеку оценивать расстояние до предметов, их высоту, глубину и т.п.
Косоугольная проекция.
Н аблюдатель
находится на оси Z и направление
проецирования проходит через точку,
находящуюся в плоскости Y/X на расстоянии
L от начала координат на прямой, образующей
с осью Х угол,
и составляет угол
с плоскостью Y/X.
аблюдатель
находится на оси Z и направление
проецирования проходит через точку,
находящуюся в плоскости Y/X на расстоянии
L от начала координат на прямой, образующей
с осью Х угол,
и составляет угол
с плоскостью Y/X.
Матрица, описывающая косоугольное проецирования, имеет вид:
 .
.
Применение матрицы QК приводит к сдвигу и последующему проецированию. Точки с координатой z переносятся в направлении Х на zLcos и в направлении y на zLsin, и затем осуществляется ортографическое проецирование на плоскость z=0. Сдвиг сохраняет параллельность прямых, а также углы и расстояния в плоскостях, параллельных оси z=0.
Для свободной проекции L=1, а угол =45. Для кабинетной проекции L=1/2, а =arctg(2)=63,4.
Ортографическое проектирование есть частный случай косоугольного проецирования (L=0 и =90).
.
Рассмотренные матрицы преобразований не всегда позволяют получить полное представление о предмете. Поэтому в системах 3_х мерной графики нет необходимости фиксировать какие-либо конкретные виды проекций. Для наиболее полного представления о предмете чаще используют операции вращения предмета вокруг двух или трех осей. Например, матрица

осуществляет поворот на угол относительно оси Y, на угол - вокруг оси Х и выполняет проецирование вдоль оси Z.