

ФИЗИКА3673
.pdf20
3.3. Определение момента инерции вспомогательного груза
3.3.1. Рассчитайте момент инерции вспомогательного груза Iг по формулам (4.7) и (4.8). Для этого произведите соответствующие измерения параметров махового колеса с грузом и занесите их в табл. 4.1.
3.3.2. Рассчитайте относительное отклонение расчета момента инерции груза по формула (4.7) и (4.8)
I |
Iгр(14) |
Iгр(15) |
100% . |
|
|
|
|||
Iгр(14) |
||||
|
|
|||
Таблица 4.1 Результаты измерений параметров махового колеса с грузом и
расчета момента инерции вспомогательного груза
m |
r |
d |
b |
R0 |
l |
Iгр по формулам |
||
(4.7) |
(4.8) |
|||||||
|
|
|
|
|
|
|||
кг |
м |
м |
м |
м |
м |
кг.м2 |
кг.м2 |
|
|
|
|
|
|
|
|
|
|
3.4. Определение момента инерции махового колеса 3.4.1. Определите момент инерции махового колеса. Грузы
на стержнях укрепите в крайних и строго симметричных положениях относительно оси подвеса. Подготовьте к работе таймер. Отведите маховое колесо от положения равновесия на небольшой угол (не более 15О). Отпуская колесо, одновременно включите таймер. При первом возвращении колеса в исходное состояние начните счет числа колебаний. При совершении 10 – 20 полных колебаний N выключите таймер. Вычислите период Т одного колебания
T t . N
3.4.2. Опыт повторите пять раз и определите среднее значение периода колебаний T . Рассчитайте момент инерции ма-

21
хового колеса с грузом по формуле (4.5), а значение момента инерции груза взять по формуле (4.8). Результаты измерений и вычислений занесите в табл. 4.2.
Таблица 4.2
Результаты измерения периода колебаний махового колеса
№ опыта |
1 |
2 |
3 |
4 |
5 |
Iк , |
|
|
|
|
|
|
кг.м2 |
t , с |
|
|
|
|
|
|
|
|
|
|
|
|
|
T , с |
|
|
|
|
|
|
|
|
|
|
|
|
|
T , с |
|
|
|
|
|
|
|
|
|
|
|
|
|
Iк , кг.м2 |
|
|
|
|
|
|
3.4.3.Передвиньте грузы на стержнях махового колеса ближе к оси вращения, не нарушая их симметрии и равновесия при отсутствии добавочного груза. Повторите измерения и вычисления 3.4.1. и занесите их в табл. 4.3, составленную аналогично табл. 4.2.
3.4.4.Рассчитайте теоретическое значение момента инерции
махового колеса I теор по формуле
I |
теор |
m R2 |
4 |
1 |
m l |
2 |
4 m r 2 |
, |
(4.9) |
|
|
||||||||||
|
к к |
|
3 |
cт ст |
гр гр |
|
|
|||
|
|
|
|
|
|
|
|
|
||
где mк , mст , mгр – массы обода махового колеса, стержней и грузов на стержнях, соответственно; Rк – радиус обода; lcт – длина стержня; rгр – расстояние от оси вращения до центра груза на
стержне.
Сравните результаты расчета с экспериментально измеренными значениями моментов инерции махового колеса по формуле
|
Iтеор Iэксп |
100% |
Iтеор
22
3.5. Расчет динамических характеристик
3.5.1.Запишите выражения для угла, угловой скорости и ускорения, собственной частоты колебаний махового колеса.
3.5.2.Рассчитайте максимальные параметры колебаний махового колеса 0 , ω0 , ωmax , ε , кинетическую Wкmax и потенци-
альную энергии Uпmax .
Составьте соответствующую таблицу.
3.6. Сделайте вывод о практичности данного метода определения момента инерции диска.
5. ЛАБОРАТОРНАЯ РАБОТА №5.
ИЗУЧЕНИЕ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
ВУПРУГО СВЯЗАННЫХ СИСТЕМАХ
1.Цель работы
Изучить особенности свободных и вынужденных колебаний системы на примере упруго связанных маятников.
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [1] – µµ 27.1.
– 27.4. и [2] – µµ 140 – 143. Для выполнения работы студент должен знать: а) законы динамики поступательного и вращательного движения; б) основные уравнения кинематики; в) уметь пользоваться измерительными приборами.
3. Выполнение работы 3.1. Описание лабораторной установки
Общий вид лабораторной установки FPM-13 для выполнения данной лабораторной работы представлен на рис. 5.1.
На основании 1 закреплена колонка 2, на которой закреплены втулка 3 и кронштейн 4. На стержне 5 втулки находится три подвески 6, на которых крепятся два маятника 8 и стержень 7, посредством которого возбуждаются колебания. Маятники 8 состоят из стержня и перемещаемого груза 9. Маятники упруго связаны между собой при помощи двух пружин 10, закрепленных в скобообразной обойме 11, которую можно перемещать вдоль стержней маятников. Возбуждение колебаний осуществляется при помощи приводного диска, закрепленного на вале электро-
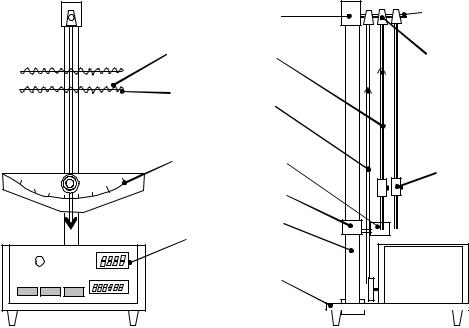
23
двигателя. Диск двигает стержень 7, связанный двумя пружинами 10 со стержнем одного из маятников, и тем самым вызывает его колебания. Электродвигатель находится в блоке управления и измерений 12.
а) |
б) |
|
3 |
6 |
10 |
8 |
5 |
|
|
|
11 |
7 |
|
|
|
|
13 |
14 |
9 |
|
4 |
|
|
|
|
12 |
2 |
|
|
|
|
|
1 |
|
Рис. 5.1. Схема установки а) вид спереди; б) вид сбоку
Угловая амплитуда колебаний маятников определяется с помощью шкалы 13. К нижнему кронштейну прикреплен фотоэлектрический датчик 14, с помощью которого определяется число полных колебаний.
Лицевая панель блока управления 12 представлена на
рис. 5.2.
Включение установки осуществляется кнопкой šсетьŸ. Кнопкой šстопŸ ограничивается число полных колебаний. Нажатием клавиши šсбросŸ блок подготавливается к новому измерению.

24
включение двигателя |
регулятор частоты двигателя |
|
индикация числа полных колебаний |
|
индикация времени колебаний |
šсетьŸ šсбросŸ šстопŸ
Рис. 5.2. Приборная панель установки
3.2. Методика измерений и расчёта
Рассмотрим колебательную систему, состоящую из двух математических маятников, упруго связанных между собой через пружину. Для такой системы величина K будет определять передачу энергии от одного маятника к другому. Если взаимодействие между маятниками мало, то передача энергии все-таки происходит. Однако этот процесс длится значительно дольше, чем при сильном взаимодействии.
При равенстве парциальных частот p |
и p |
уравнения ко- |
|||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
||
лебаний для обоих маятников будут иметь вид |
|
|
|||||||||||||
|
|
|
|
|
2 |
1 t |
|
2 1 t |
|
|
; |
(5.1) |
|||
|
|
1 |
0 cos |
|
|
|
cos |
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
2 |
0 sin |
2 1 t |
sin |
2 1 t |
, |
(5.2) |
|||||||
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
2 |
2 |
|
|
|
|
|
|
|
|
|
||||
где |
p |
|
|
– коэффициент распределения амплитуд. |
|||||||||||
|
K |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициент распределения амплитуд |
|
|
χ при идентичных |
||||||||||||
маятниках принимает два значения 1 и -1, а колебания при этом будут синфазные (рис. 5.3, а) и противофазные (рис. 5.3, б), соответственно. В первом случае, разность фаз кратна 2 n, а во втором случае – 2n 1 , где n– целое число.
а) |
б) |
Рис. 5.3

25
Биения
Предположим, что маятники могут совершать колебания только в одной плоскости, т.е. имеют одну степень свободы. В этом случае при различных частотах уравнения колебаний для двух упруго связанных маятников можно записать в виде:
1 01 (sin( 1t 1 ) ; |
(5.3) |
2 02 (sin( 2t 2 ) ), |
(5.4) |
где 01 и 02 – амплитуды колебаний первого и второго маятников, соответственно; 1 и 2 – начальные фазы первого и второго маятников, соответственно.
Результатом сложения может оказаться апериодический процесс, если частоты ω1 и ω2 не соизмеримы между собой. Если же частоты соизмеримы между собой, тогда можно найти такую
частоту 0, что выполняются соотношения |
|
|
1 |
= m 0; |
(5.5) |
2 |
= n 0, |
(5.6) |
где m и n – целые числа.
В простейшем случае, когда А01 = А02 = А0, уравнение результирующего колебания, полученное путем сложения двух начальных, будет иметь вид
|
|
1 2 |
0 (sin(m 0t 1) sin(n 0t 2 )) |
|
||||||||||||||||||
|
|
|
|
m n |
|
|
|
1 |
2 |
|
|
m n |
|
|
1 2 |
. |
(5.7) |
|||||
|
0 cos |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2 |
|
2 |
|
|
0t |
|
|
|
2 |
sin |
2 |
0t |
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Из |
последнего |
|
выражения |
видно, |
что |
множитель |
|||||||||||||||
|
|
|
m n |
|
|
2 1 |
|
|
представляет собой амплитуду резуль- |
|||||||||||||
|
|
|
|
|
||||||||||||||||||
2 |
0 cos |
2 |
|
0t |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
тирующего колебания, зависящую от времени и изменяющуюся с частотой (ω1 ω2 ) / 2 , а (ω1 ω2 ) / 2 – частота результирующего колебания. В случае, если ω1 и ω2 близки по абсолютной величине, при этом 1, ω2 , где ω ω1 ω2 , тогда результи-
рующее колебание будет иметь вид, представленный на рис. 5.4. Как видно из рис. 5.4, амплитуда результирующего колеба-
ния является функцией времени. Такие колебания называются
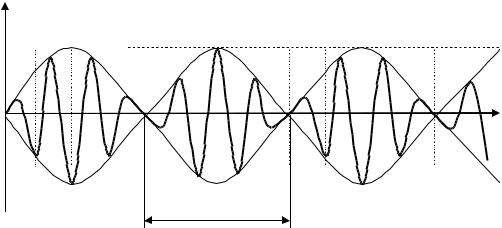
26
биениями, а частота ωδ ω1 ω2 называется циклической частотой биения.
Ф
2Ф0 
0
t
–2Ф0 










T
Рис. 5.4. Биения
Период биений определяется соотношением |
|
|||||
Tδ |
|
2π |
|
|
. |
(5.8) |
ω |
ω |
2 |
|
|||
1 |
|
|
|
|
||
3.3. Подготовка лабораторной установки к работе
3.3.1.Подключите прибор к питающей сети.
3.3.2.Установите одинаковые грузы m1=m2=m на обоих маятниках, на одном и том же расстоянии от оси колебаний.
3.3.3.Нажмите клавишу šсетьŸ и проверьте свечение лампочки фотоэлектрического датчика и индикаторов измерителя.
3.3.4.Включите питание двигателя и, плавно вращая ручку регулятора частоты, проверьте, работает ли двигатель и колеблется ли маятник.
3.4. Измерение собственной частоты колебаний маятни-
ка
3.4.1.Отсоедините от маятника пружины, соединяющие его
сдругим маятником и приводным механизмом. Один из них отклоните на угол 6 – 10О и отпустите его. После чего нажать клавишу šсбросŸ и после подсчета прибором 10 полных колебаний маятника нажать кнопку šстопŸ. Показания индикаторов занести

27
в табл. 5.1. Измерения провести пять раз. Найти частоту собст-
венных колебаний маятника по формуле 0 2 n . t
Таблица 5.1 Результаты измерения собственной частоты маятника
|
Число |
|
Частота |
Расчетная |
Погрешность |
||
|
полных |
Время |
собственных |
||||
№ |
частота |
измерений |
|||||
колебаний |
t, с |
колебаний |
|||||
|
0теор, с |
-1 |
, % |
||||
|
n |
|
ω0 , с-1 |
|
|||
1 |
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
3.4.2. Сравнить ее с результатами расчета по формуле
|
0 |
теор |
|
g |
, |
|
|||||
где l – длина маятника. |
|
l |
|||
|
|
|
|
|
|
Приборная погрешность |
|
измерения времени составля- |
|||
ет 0,02 %. |
|
|
|
|
|
3.5. Определение частот синфазных и противофазных колебаний
3.5.1. Присоедините пружины, осуществляющие упругую связь между маятниками, отклонить маятники в одну сторону на угол 6 – 10О, отпустить их, аналогично п. 3.4.1 измерить частоту синфазных колебаний с.
3.5.2.Измерения провести 5 раз, данные занести в табл. 5.2. Оцените погрешность измерений по теории погрешностей.
3.5.3.Отклоните маятники в противоположные стороны на одинаковый угол 10О и отпустить их. Измерьте частоту противо-
фазных колебаний п. Данные занести в табл. 5.2. 3.5.4. Оцените погрешность измерений.
28
Таблица 5.2 Результаты измерения частот синфазных и противофазных
колебаний
|
Частота синфазных |
|
|
Частота противофазных |
|
|||||
|
|
Колебаний |
|
|
|
Колебаний |
|
|||
№ |
n |
t, с |
с, |
, % |
№ |
n |
t, с |
п, |
|
, % |
п/п |
с-1 |
п/п |
с-1 |
|
||||||
1 |
|
|
|
|
1 |
|
|
|
|
|
… |
|
|
|
|
… |
|
|
|
|
|
5 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.6. Определение частоты колебаний маятника при наличии упругой связи маятника
3.6.1. Закрепите неподвижно один маятник, придержать его рукой, например, а другой отклонить на угол 7 – 10О и определи-
те частоту его колебаний p .
3.6.2. Провести пять измерений, данные занести в табл. 5.3. Рассчитать коэффициент упругой связи по формуле
Kэкс 2p 20 .
3.6.3.Сравните рассчитанные результаты со значением ко-
эффициента |
Kтеор , |
найденным по формуле |
Kтеор |
ka |
2 |
, где |
||||||||
ml |
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
k = 11,02 Н/м; a 0 |
xa ; xa |
– расстояние от оси колебаний до |
||||||||||||
пружины. |
|
|
|
|
|
|
Таблица 5.3 |
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
Результаты измерения коэффициента упругой связи |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Частота колебаний маятника при |
|
Коэффициент |
|
Коэффициент |
|
|
||||||||
|
упругой связи |
|
упругой связи |
|
|
|||||||||
|
наличии упругой связи |
|
|
|
, % |
|||||||||
|
|
(экс. знач.) |
|
(теор. знач.) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
№ |
n |
|
t, с |
|
р , с-1 |
|
Kэкс , с-2 |
|
Kтеор , с-2 |
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29
3.7. Определение частот при биениях 3.7.1 Отклоните один из маятников на угол 8–12О, другой
придержать рукой в положении равновесия. Одновременно отпустите оба маятника и наблюдайте колебательный процесс, называемый биениями.
3.7.2. Измерить частоту колебаний ω одного из маятников, данные занести в табл. 5.4. Измерить частоту биений ωδ . Для этого необходимо следить за одним из маятников и измерить время Tδ между двумя последующими состояниями маятника, когда его амплитуда или максимальна, или равна нулю. Данные занести в табл. 5.4.
|
3.7.3. Рассчитайте частоты |
по формулам |
ωс ω |
ωδ |
, |
||||||||||||
|
2 |
||||||||||||||||
|
|
|
ωδ |
|
|
|
|
|
|
|
|
|
|
|
|||
ωп ω |
. Сравните полученные |
|
результаты |
с |
результатами |
||||||||||||
|
|||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
измерений в п. 3.6. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.4 |
||||
|
|
|
|
Результаты измерения частоты биений |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Частота колебаний |
Период |
Частота |
|
Частота син- |
Частота про- |
|
, |
||||||||||
одного из маятников |
|
фазных коле- |
|
тивофазных |
|
||||||||||||
|
при биениях |
биений |
биений |
|
баний |
|
колебаний |
|
% |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
№ |
n |
t, с |
, с-1 |
T , с |
ω |
δ |
, с-1 |
|
с, с-1 |
|
п, с-1 |
|
|
|
|||
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.8. Наблюдение вынужденных колебаний
3.8.1.Установить пружины, связывающие приводной стержень со стержнем одного из маятников. Включите питание двигателя.
3.8.2.Плавно изменяя число оборотов двигателя, наблюдать
изменение амплитуды колебаний маятников. При угле колебаний больше 20О наблюдается режим резонанса.
3.8.3.При низких частотах наблюдать первый резонанс с
частотой синфазных колебаний с, а второй на частоте противо-