

ФИЗИКА3673
.pdf10
3.3. Измерение момента инерции диска 3.3.1. Измерьте секундомером время 10 полных колебаний.
По формуле T t (где n – число полных колебаний) вычислить n
период колебаний T маятника.
3.3.2.Опыт повторите 10 раз и найдите среднее значение периода колебаний T .
3.3.3.С помощью штангенциркуля и масштабной линейки
измерьте радиус диска R , радиус вырезанной части R0 и l0 BD (рис. 2.2). Результаты измерений занесите в табл. 2.1.
Таблица 2.1 Результаты измерения момента инерции диска с вырезом
№ |
t |
T |
T |
m |
R |
R0 |
l |
l0 |
J |
J т |
ε |
|
п/п |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
с |
с |
кг |
м |
м |
м |
м |
кг.м2 |
кг.м2 |
кг.м2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
3.3.4.По формуле (2.5) рассчитайте расстояние l от центра масс диска до оси качаний.
3.3.5.По полученным значениям l и T вычислите момент инерции диска J , используя формулу (2.2).
3.3.6.По формуле (2.9) рассчитайте момент инерции J т диска с вырезом и сравните его с J .
3.3.7.Найдите относительную ошибку измерений.
ε |
J т J |
100 %. |
|
Jт
3.4.Сделайте вывод о возможностях данного метода оп-
ределения момента инерции.
11
3. ЛАБОРАТОРНАЯ РАБОТА №3.
ОПРЕДЕЛЕНИЕ ПОСТОЯННОЙ КРУЧЕНИЯ НИТИ БАЛЛИСТИЧЕСКИМ МЕТОДОМ
1. Цель работы
1.1.Применение законов динамики вращательного и колебательного движений к решению практических задач.
1.2.Освоение экспериментального метода определения постоянной кручения нити.
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [1] – µµ 5.1 – 5.3, [2] – µµ 13, 19, [4] – µµ 79. Для выполнения работы студент должен знать: а) закон динамики вращательного движения твердого тела; б) уметь пользоваться измерительными приборами.
3. Выполнение работы
3.1.Описание лабораторной установки
Общий вид баллистического крутильного маятника предоставлен на рис. 3.1.
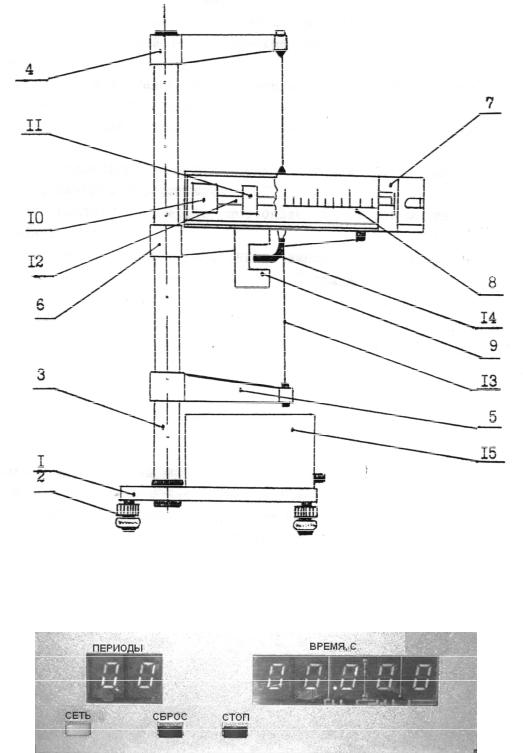
Основание 1 оснащено регулируемыми ножками 2, которые позволяют выравнивать прибор. В основании закреплена колонна 3, на которой крепятся верхний кронштейн 4, нижний кронштейн 5 и средний кронштейн 6. К среднему кронштейну прикреплен пружинный пистолет 7, а также прозрачный экран с нанесенной на него угловой шкалой 8 и фотоэлектрический датчик 9. Кронштейны 4 и 5 имеют зажимы, служащие для крепления стальной проволоки 13, на которой подвешен маятник, состоящий из двух мисочек 10, наполненных пластилином, двух перемещаемых грузов 11 и штанги 14. Фотоэлектрический датчик соединен специальным разъемом с привинченным к основанию универсальным миллисекундомером 15. Миллисекундомер после нажатия клавишных переключателей šсетьŸ и šсбросŸ фиксирует число и время колебаний маятника. В конце измерений нажать клавишу šстопŸ.
На приборной панели размещены (рис. 3.2): табло секундомера, табло счетчика периодов колебаний, кнопки šсетьŸ, šстопŸ, šсбросŸ. Начало отсчета начинается автоматически. При нажатии кнопки šстопŸ отсчет времени прекращается по окончанию последнего периода.
12
Рис. 3.1. Баллистический крутильный маятник (вид сбоку)
Рис. 3.2. Приборная панель блока управления
3.2. Методика измерений и расчёта
Важными упругими характеристиками твердого тела при его деформациях являются модуль упругости, модуль сдвига и т. д., которые определяются экспериментально. Рассмотрим экспериментальный метод определения модуля кручения.
|
|
|
|
|
13 |
|
|
|
Согласно свойству аддитив- |
|
|
|
|||||
ности момент инерции крутиль- |
|
|
|
|||||
ного маятника для двух положе- |
|
|
|
|||||
ний грузов относительно оси ко- |
|
|
3 |
|||||
лебаний можно представить в ви- |
|
|||||||
|
|
|||||||
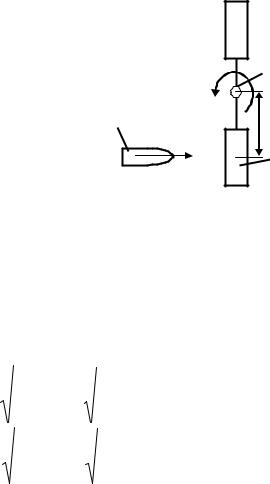
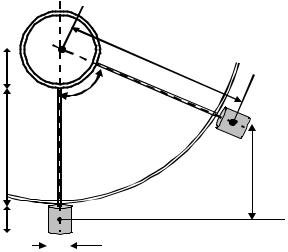
де (рис. 3.3) |
2m R 2 |
1 |
|
|
r |
|||
J |
1 |
J |
0 |
|
|
|||
(3.1) |
|
|
2 |
|||||
|
|
0 1 , |
|
|
||||
J 2 J 0 2m0 R22 |
|
m |
|
m0 |
||||
где J 0 – момент инерции кру- |
|
|
|
|
|
Рис. 3.3. Взаимодействие |
||||||||||||||||||||||||
тильного маятника |
|
без |
грузов; |
|
|
|
|
|
||||||||||||||||||||||
R – расстояние от оси вращения |
|
|
|
|
|
|
|
|
тел в системе ¡пуля- |
|||||||||||||||||||||
маятника до центра масс грузов; |
|
|
|
|
|
|
|
|
|
|
|
маятник¢ |
|
|||||||||||||||||
m0 – масса груза. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Период колебаний крутильного маятника равен: |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
J |
0 |
2m R2 |
|
||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|||||||||
T1 |
|
2π |
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
τ |
|
|
, |
(3.2) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
0 |
2m R2 |
|
|||||||||
T |
|
2π |
|
|
|
|
|
|
2π |
|
|
|
|
|
0 |
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где τ – модуль кручения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Решая совместно систему уравнений (3.2) получим выраже- |
||||||||||||||||||||||||||||||
ние для нахождения модуля упругости кручения |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
8 2m R2 |
R2 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
2 |
|
. |
|
|
|
|
|
(3.3) |
||||||
|
|
|
|
|
|
|
T 2 |
T 2 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С другой стороны, из системы уравнений (3.2) можно найти |
||||||||||||||||||||||||||||||
момент инерции маятника без грузов |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
J |
|
|
2m |
R12T22 |
R22T12 |
. |
|
|
|
(3.4) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
0 |
|
|
|
|
0 |
|
|
|
|
T 2 |
T 2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
||||
Подставив полученное выражение в (3.4), получим выраже- |
||||||||||||||||||||||||||||||
ния для J1 и J 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 (R2 |
R2 ) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
2m T |
|
|
|
|
||||||||||||||||||||
J |
1 |
|
|
0 1 |
1 |
|
|
|
|
|
2 |
, |
|
|
|
(3.5) |
||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T |
2 T |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
14
|
|
|
2m T 2 (R |
2 |
R |
2 ) |
|
|||
J |
2 |
|
|
0 2 |
|
1 |
|
2 |
. |
|
|
T 2 |
T |
2 |
|
||||||
|
|
|
|
|
||||||
|
|
|
|
1 |
|
|
2 |
|
|
|
Согласно [3] модуль кручения τ зависит от модуля сдви- |
||||||||||
га G и геометрических размеров тела |
|
|
|
|||||||
|
|
|
2 G |
r |
3 |
r , |
(3.6) |
|||
|
|
l |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
где l – длина тела. |
|
|
|
|
|
Для однородного стержня (проволоки) радиусом r |
из по- |
||||
следней формулы путем интегрирования получаем |
|
||||
|
G |
r |
4 |
, |
(3.7) |
2l |
|
||||
|
|
|
|
|
|
3.3. Определение периода колебаний маятника
3.3.1. Установите грузы массой m0 на максимальном расстоянии R1 от оси вращения.
3.3.2.Включите установку, нажав переключатель šсетьŸ. Деблокируйте миллисекундомер (переключатель šсбросŸ).
3.3.3.Зарядите пружинный пистолет пулей массой m и произведите выстрел.
Таблица 3.1 Результаты измерения периода колебаний маятника
№ |
R , |
|
, |
r , |
t , |
T |
t |
, |
|
|
|
||||||||
Опыта |
|
|
|
|
|
|
|
n |
|
м |
град |
|
рад |
м |
с |
с |
|||
|
|
||||||||
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
средние |
|
|
|
|
|
|
|
|
|
значения |
|
|
|
|
|
|
|
|
|

15
3.3.4.Измерьте максимальный угол отклонения маятника
ивремя t десяти полных колебаний. Нажмите кнопку šстопŸ.
3.3.5.Измерьте расстояние r от оси маятника до места попадания пули.
3.3.6.Опыт повторите не менее 5 раз. Данные занесите в
табл. 3.1.
3.3.7.Установите грузы на минимальном расстоянии R2 от
оси вращения. Повторите пп. 3.3.3. – 3.3.5. не менее 5 раз. Данные занесите в табл. 3.2, составленную самостоятельно аналогично табл. 3.1.
3.4. Определение модуля упругости кручения нити
3.4.1.Средние значения измеренных величин из табл. 3.1 и
3.2занесите в табл. 3.3.
3.4.2.Рассчитайте модуль упругости кручения по форму-
ле (3.3), а также начальную угловую скорость max |
|
, мо- |
|||
|
|||||
|
|
|
|
J |
|
мент инерции маятника J по (3.5). Результаты расчетов занесите |
|||||
в табл. 3.3. |
|
|
|
|
|
T 2 |
|
|
|
|
|
3.4.3. Постройте график зависимости J f |
|
|
. Найдите |
||
|
|||||
|
|
|
|
|
|
4 |
|
|
|
||
тангенс угла наклона прямой к оси ОХ. Покажите, что tg . 3.4.4. Полученное значение сравните с результатом расче-
та расч по формуле (3.7). Длина нити l 0,2 м, радиус нити rст 0,2 мм, модуль сдвига G 5 » 1010 Па.
3.5. Сделайте вывод о практичности используемого метода для определения модуля упругости кручения.
Таблица 3.3 Определение основных характеристик маятника
№ |
m , |
m0 , |
R , |
T , |
, |
r , |
, |
|
J , |
|
|
|
|
|
|
|
Нм |
|
|
п/п |
кг |
кг |
м |
с |
рад |
м |
1/с |
. 2 |
|
|
рад |
кг м |
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16
4. ЛАБОРАТОРНАЯ РАБОТА №4.
ИЗУЧЕНИЕ КОЛЕБАНИЙ ФИЗИЧЕСКОГО МАЯТНИКА
1. Цель работы 1.1. Определение параметров механических колебаний фи-
зического маятника в виде махового колеса.
1.2. Определение момента инерции махового колеса.
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [1] – µµ 4.3, 27.2 и [2] – µµ 16, 140-142, [3] – µµ 40, 41.Для выполнения работы студент должен знать: а) законы динамики вращательного движения твердого тела; б) формулы расчета механической энергии; в) уметь пользоваться измерительными приборами.
3. Выполнение работы 3.1. Описание лабораторной установки
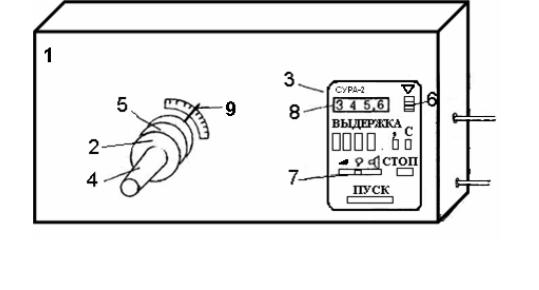
Лабораторный комплекс šМеханикаŸ выполнен в виде панели 1 (рис. 4.1), на которой размещены универсальная вращающаяся подвеска 2 для укрепления на ней сменных модулей и таймер 3.
Вращающаяся подвеска представляет собой вал, имеющий форму конусной втулки 4, со шкивом 5 на подшипниках. В дан-
к сети
к МК-56
Рис. 4.1. Лабораторный механический комплекс
ной работе на конусную втулку надевается маховое колесо. Комплекс оснащен системой автоматической регистрации измеряемых параметров (числа колебаний и времени колебаний). Время
17
фиксируется электронным секундомером, измеряемые параметры вносятся в память программируемого микрокалькулятора МК-56
ивысвечиваются на его табло. Для автоматического запуска таймера и счетчика числа импульсов (колебаний) в корпус вала вмонтирован магнит, а на неподвижной панели укреплен магнитоуправляемый контакт.
Работа может выполняться
ив ручном режиме (без МК-56).
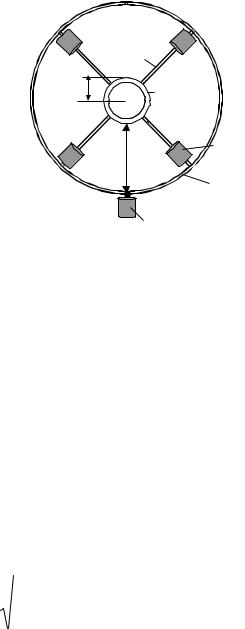
Маховое колесо состоит из |
|
1 |
|
|
четырех взаимно |
перпендику- |
r |
|
|
|
|
|||
лярных стержней 1, закреплен- |
2 |
|
||
ных на втулке 2 (рис. 4.2). На |
|
|
|
|
стержнях могут помещаться гру- |
|
d |
3 |
|
зы одинаковой массы 3 (по од- |
|
4 |
||
|
|
|||
ному на каждом стержне). По- |
|
|
||
ложение стержней дополнитель- |
|
5 |
|
|
но фиксируется ободом 4. Такая |
Рис. 4.2. Маховое колесо |
|||
центрированная система тел ха- |
||||
рактеризуется |
безразличным |
|
установки |
|
равновесием. Если на ободе махового колеса укрепить с помощью винта вспомогательный груз
5, безразличное равновесие системы заменится устойчивым. В результате этого маховое колесо приобретает способность совершать колебательные движения относительно положения равновесия, т.е. становится физическим маятником. Угол отклонения системы от положения равновесия фиксируется стрелкой 9 по шкале, имеющейся на панели комплекса (рис. 4.1).
3.2. Методика измерений и расчёта
Физический маятник совершает гармонические колебания с
периодом |
|
|
|
|
|||
|
2π |
|
|
|
|
|
|
T |
|
I |
. |
(4.1) |
|||
|
|
||||||
|
ω0 |
mgl |
|
||||
Для махового колеса (рис. 4.2) момент инерции |
I равен |
||||||
I Iк Iгр , |
(4.2) |
||||||
18
где Iк – момент инерции махового колеса без вспомогательного
груза; Iгр – момент инерции вспомогательного груза. |
|
|||||||||||||||||||||||
|
|
|
Высоту подъема груза определяем по формуле (рис. 4.3) |
|||||||||||||||||||||
|
|
|
|
|
h l l cos 0 l(1 cos 0 ) 2l sin 2 |
0 |
, |
(4.3) |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
где l |
– расстояние от оси подвеса до центра масс груза (точка А), |
|||||||||||||||||||||||
равно |
|
|
|
b |
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
||||||
|
|
|
|
|
|
l R |
r d |
, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||
где R – радиус колеса; b – высота подъема груза. |
|
|||||||||||||||||||||||
|
|
|
При малых углах отклонения маятника от положения равно- |
|||||||||||||||||||||
весия sin( 0 |
/ 2) 0 / 2 и тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
h 2l( 0 / 2)2 l 02 / 2 . |
|
|||||||||||||||||
|
|
|
Потенциальная энергия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
груза на высоте h равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Uп mgl 02 / 2 . |
|
|
|
|
.О |
|
|
|
|
l |
|
||||||||||
|
|
|
|
|
(4.5) |
|
|
|
r |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
||||||||
|
|
|
Если пренебречь силами |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
трения и сопротивления воз- |
|
d |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
B |
|||||||||||||
духа, то на основании закона |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
сохранения |
механической |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
энергии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
b |
А |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
U п max Wк max |
|
|
|
|
|
|
2R0 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
и уравнения (4.2) – (4.5) запи- |
|
|
|
|
Рис. 4.3. Колебание махового |
|||||||||||||||||||
шем в виде |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
1 |
I |
к Iгр |
4 2 02 |
mgl 02 / 2. |
|
|
|
|
|
|
|
|
|
|
|
колеса |
|
||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Откуда можно выразить момент инерция махового колеса |
|||||||||||||||||||||
|
|
|
|
|
|
Iк |
mgl |
T 2 Iгр . |
|
|
|
|
|
|
(4.6) |
|||||||||
|
|
|
|
|
|
4 2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Вспомогательный груз представляет собой цилиндр высотой b . Используя теорему Штейнера, для момента инерции груза

19
относительно оси Z (рис. 4.3), проходящей через точку О перпендикулярно чертежу, будим иметь формулу:
b2 |
|
R2 |
|
b |
2 |
|
||
Iгр m |
|
|
0 |
r d |
|
|
, |
(4.7) |
|
|
2 |
||||||
12 |
4 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
где R0 – радиус основания цилиндра; r – радиус втулки махового колеса; d – расстояние от поверхности втулки до вспомогательного груза; m – его масса.
Если размеры вспомогательного груза невелики по сравнению с расстоянием от его до оси вращения (более чем в 10 раз), то этот груз можно принять за материальную точку, и момент инерции рассчитать по формуле
Iгр ml 2 , |
(4.8) |
где l r d b / 2 (по рис. 4.3).
3.3. Порядок работы с таймером СУРА–2
1.Перед включением таймера в сеть выключатель питания 6
(рис. 4.1) должен находиться в нижнем положении, переключатель режимов 7 – в положении š Ÿ.
Ÿ.
2.Включив питание, установите переключатель 6 в положение š Ÿ.
Ÿ.
3.Для приведения таймера в исходное состояние нажмите первые три клавиши выдержки, затем клавишу š Ÿ и четвертую клавишу выдержки. На табло высветятся четыре произвольно набранные Вами цифры, например, 345,6. При таком наборе время измеряется с точностью до десятых долей секунды. Перенесение запятой влево повышает точность измерений на порядок.
Ÿ и четвертую клавишу выдержки. На табло высветятся четыре произвольно набранные Вами цифры, например, 345,6. При таком наборе время измеряется с точностью до десятых долей секунды. Перенесение запятой влево повышает точность измерений на порядок.
4.При запуске таймера с 345,6, отсчет времени начинается после нажатия клавиши šпускŸ. При этом на индикаторе 8 идет отсчет времени в обратном счете. При нажатии клавиши šстопŸ счет времени прекращается. Пусть новое показание на табло будет 324,1. Тогда искомое время равно
t 345,6 324,1 21,5 (с).