

студент группы Мн-560
___________ Тихонов А.С.
___________________2014 г.
Проект защищен с оценкой ________________________
___________________2014 г.
Челябинск 2014
Аннотация
Тихонов А.С. Следящий электропривод металлорежущего станка. Челябинск: ЮУрГУ 2014 - 29 стр., библиография 3 наименования.
В пояснительной записке приведен расчет и выбор следящего электропривода с двигателем постоянного тока независимого возбуждения. Произведен расчет передаточного числа редуктора и звеньев кинематической цепи, приведение силы, момента нагрузки и моментов инерции к валу электродвигателя, расчет параметров звена "преобразователь-двигатель", расчет параметров регуляторов на основе оптимальных настроек регулируемого привода, а также построены схемы силовой части преобразователя и структурная схема следящей системы.
Оглавление
Введение 4
Задание 5
2. Выбор и расчет элементов следящего электропривода 7
2.1. Энергетический расчет следящего электропривода 7
2.1.1. Методика выбора мощности электродвигателя 7
2.2. Составление схемы силовой части преобразователя 14
2.2.1 Выбор силовых полупроводниковых приборов 14
2.3. Регуляторы и датчики положения 16
2.3.1. Регуляторы 16
2.3.2. Измерительный преобразователь перемещения 17
3. Расчет параметров СЭП на основе оптимальных настроек 18
3.1. Структурная схема следящей системы 18
3.1.1. Функциональная схема следящего электропривода 18
3.1.2. параметры передаточных функций электродвигателя и механизма 19
3.1.3. Параметры передаточной функции широтно-импульсного преобразователя 20
4. Моделирование переходных процессов следящего электропривода 25
4.1. Подготовка структурной схемы модели 25
Заключение 29
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 30
Введение
Целью курсовой работы является закрепление знаний по дисциплине и овладение методикой расчета параметров следящего электропривода (СЭП) постоянного тока. Одновременно с этим ставится задача изучения и использования средств моделирования электропривода на ЭВМ.
Объектом проектирования является электропривод станочного типа, для которого используется методика расчета мощности электродвигателя на основе заданной нагрузочной диаграммы механизма. Следящая система должна быть построена на основе принципа подчиненного регулирования, поэтому в объем работы входит расчет параметров регуляторов, анализ системы и принятие решения для снижения скоростной ошибки. Моделирование системы выполняется с использованием программного средства VisSim путем изучения реакций электропривода при отработке типовых воздействий.
Курсовая работа выполняется в виде пояснительной записки в соответствии со стандартами Университета и указаниями по оформлению курсовых и дипломных проектов.
Задание
Цель работы:В соответствии с заданной кинематической схемой механизма спроектировать следящий электропривод с двигателем постоянного тока независимого возбуждения.
Вопросы задания
1. Введение: назначение следящего электропривода и предъявляемые к нему требования.
2. Расчет мощности и выбор электродвигателя.
3. Выбор передаточного числа редуктора и звеньев кинематической цепи.
4. Приведение силы, момента нагрузки и моментов инерции к валу электродвигателя.
5. Разработка схемы силовой части преобразователя, выбор силовых тиристоров или транзисторов.
6. Составление структурной схемы следящей системы, расчет параметров звена «преобразователь-двигатель».
7. Расчет параметров регуляторов на основе оптимальных настроек регулируемого привода.
8. Моделирование переходных процессов в системе при отработке ступенчатого входного воздействия (по углу или линейному перемещению).
9. Построение статических и частотных характеристик САУ.
10. Заключение.
Объем графической части (обязательные рисунки)
1. Принципиальная схема силовой части преобразователя и двигателя.
2. Временная диаграмма работы преобразователя.
3. Структурные схемы САУ.
4. Логарифмические частотные характеристики контура положения
(анализ устойчивости по ЛАЧХ).
Графики переходных процессов: x(t) или (t); (t); Iя(t).
Все рисунки выполняются на обычной бумаге или миллиметровке.
Варианты задания
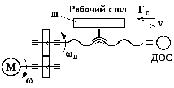
Кинематическая схема механизма:
– механизм поступательного движения (рис. 1.1).
Расчетная нагрузочная диаграмма:
– график статической силы Fс (t) (рис. 1.1)
Нагрузка приложена к выходному звену кинематической цепи – к рабочему столу или вращающейся массе. Диаграммы заданы для скорости v (табл. 1.1):
v = 0,2vmax.
 а)
а)
 б)
б)
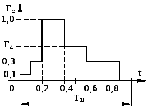
Рис. 1.1. Кинематическая схема (а) и нагрузочная диаграмма (б) механизма
Нагрузочная
диаграмма
задана для относительных значений
статического момента нагрузки
 и времени
и времени :
:


где
 –
максимальное значение силы , Tц
– время цикла.
–
максимальное значение силы , Tц
– время цикла.
По заданию используем реверсивный ТП с раздельным управлением групп вентилей (рис. 1.2).

Рис. 1.2. Схема подключения якоря электродвигателя M к преобразователю U
Датчик обратной связи по положению – любой (указать тип и привести его краткую характеристику).
Тип двигателя – постоянного тока, серий ДК, ДПР и другие.
Заданные параметры по варианту № 17 приведены в табл. 1.1,
где m, – масса механизма,
 – относительное
значение силы на четвертом интервале.
– относительное
значение силы на четвертом интервале.
Таблица 1.1
Заданные параметры следящего электропривода
|
Вариант № |
Вид преобр. |
m, кг |
vmax, мм/мин |
Fс.max, кН |
|
|
17 |
в |
170 |
700 |
25 |
0,7 |

2. Выбор и расчет элементов следящего электропривода
2.1. Энергетический расчет следящего электропривода
2.1.1. Методика выбора мощности электродвигателя
Выбор мощности и типа электродвигателя (ЭД) для следящего электропривода делаем по методике. Основным критерием выбора мощности электродвигателя является его нагрев [1].
Проектируемый СЭП предназначен для работы в условиях привода подачи станка с числовым программным управлением. К такому приводу обычно предъявляют следующие качественные требования [2]:
– высокая максимальная скорость;
– значительные перегрузки в повторно-кратковременном режиме работы;
– высокая стабильность характеристик усилителя и тахогенератора;
– высокое быстродействие при апериодическом характере переходных процессов разгона и торможения;
– высокое быстродействие при изменении нагрузки на самых малых скоростях;
– широкий диапазон регулирования.
Выбор электродвигателя выполняем по нагрузочной диаграмме.
В курсовой работе используется следующая методика выбора двигателя.
Принимаем допущения о параметрах механической передачи:
– потери мощности на трение в передаче постоянны;
– коэффициент полезного действия при максимальной нагрузке (Fс.max,Mс.max) ηmax = 0,9.
– шаг ходового винта (для рис. 1.1, а) hв = 8 мм.
2. Определим по формуле (2-5) относительное значение момента трения в передаче, приведенное к рабочему органу:
 =
= =0,111.
=0,111.
Полное значение статической момента, учитывающее трение в передаче, определяем по формуле
 ,
,
полученные значения заносим в табл. 2.
Таблица 2
|
Номер интервала k |
1 |
2 |
3 |
4 |
5 |
6 |
|
Длительность
|
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,1 |
|
Значение
силы
|
0,111 |
0,411 |
1,111 |
0,811 |
0,411 |
0,111 |


3. Найдем эквивалентный момент нагрузки рабочего стола с учетом потерь на трение в передаче:
 =
=
 Н.
Н.
Здесь
Fс.п.k
полные
значения силы ,
 относительные значения полезной силы,все
названные значения соответствуют
интервалу времени длительностью
относительные значения полезной силы,все
названные значения соответствуют
интервалу времени длительностью
 .
.
Вычисляем эквивалентный момент на ходовом винте (рис. 1.1):

 21.286
Нм
21.286
Нм
4. Выбор электродвигателя делаем для работы в режиме S1 при циклически изменяющейся нагрузке. Условием выбора являются неравенства:
Mном
≥ Mэ.д
или
 .
.
Передаточное отношение редуктора должно обеспечивать при номинальной скорости двигателя nном получение скорости механизма vmax, которой соответствует частота вращения ходового винта
 об/мин.
об/мин.
Максимально
возможное значение передаточного числа
редуктора находим по формуле:  ,
,
Нижний предел выбираемой номинальной мощности электродвигателя:
 =
=
 195
Вт.
195
Вт.
Расчет
значений передаточного числа
 и эквивалентного моментаMэ.д.min
для
двигателей с разными номинальными
скоростями nном
приведен в табл. П3.3.
и эквивалентного моментаMэ.д.min
для
двигателей с разными номинальными
скоростями nном
приведен в табл. П3.3.
Таблица П3.3
Значения эквивалентного момента на валу ЭД
|
Номинальная скорость ЭД nном, об/мин |
1000 |
3000 |
6000 |
|
Максимальное передаточное число iр.max |
8,33 |
25 |
50 |
|
Эквивалентный момент Mэ.д.min , Нм |
2,52 |
0,84 |
0,42 |
|
Номинальная мощность ЭД Pном.min , Вт |
220 |
220 |
220 |
С учетом запаса на регулирование выбираем двигатель с номинальной мощностью Pном > 1,5Pном.min = 292 Вт.
По табл. П3.3 и таблицам параметров двигателей [1, 2] (см. приложение 1 к курсовой работе) видим, что для номинальной мощностью 292 Вт может быть выбран электродвигатель типа ДК1-3,5-100АТ. Двигатель типа ДК1 имеет более высокую постоянную времени нагрева и лучше выдерживает кратковременные перегрузки по току. В связи с этим выбираем ЭД типа ДК1-3,5-100АТ.
Параметры двигателя приведены в таблице 4.
Конструктивная постоянная двигателя равна с=0,54
Конструктивная постоянная вычислена по формуле
 ,
,
Таблица 4
Параметры электродвигателя ДК1-3,5-100АТ
|
Параметр |
Обозначение |
Ед. измерения |
ДК1-3,5-100АТ |
|
Номинальный момент |
Mном |
Нм |
3,5 |
|
Номинальная скорость |
nном |
об мин |
1000 |
|
Номинальная мощность |
P2н |
Вт |
370 |
|
Номинальное напряжение |
Uном |
В |
60 |
|
Номинальный ток |
Iном |
А |
7,5 |
|
Максимальный момент |
Mмакс |
Нм |
24,5 |
|
Момент инерции якоря |
Jд |
г·м2 |
2,9 |
|
Сопротивление якоря |
Rя.д |
Ом |
1,15 |
|
Индуктивность якоря |
Lя.д |
мГн |
4,02 |
|
Конструктивная постоянная |
c |
В·с |
– |
|
Номинальное напряжение тахогенератора |
Eтг |
В |
10 |
Проверка двигателя. Определение оптимального передаточного числа редуктора
После предварительного выбора двигателя передаточное число редуктора может быть скорректировано. В связи с этим необходимо дополнительно проверить двигатель на нагрев. Предельный случай, когда перегрева не будет, соответствует условию Mэд.=Mном.
Определим минимально возможное передаточное число редуктора по условию работы двигателя без перегрева

 =
6
=
6
Оптимальное передаточное число редуктора найдем с учетом статической силы Fс.= Fс.max = 25 кН при пятикратной перегрузке двигателя по моменту, т.е. M = 5·Мном = 17,5 Нм:
 =2,632.
=2,632.
Поскольку передаточное отношение по условию нагрева должно лежать в диапазоне от 6 до 8,3, окончательно принимаем iр=6.08. При таком редукторе максимальная частота вращения двигателя будет равна:

 об/мин.
об/мин.
Уточним приведенные параметры.
Приведенный максимальный момент нагрузки
 5,82
Нм < Ммакс.
5,82
Нм < Ммакс.
Приведенный момент инерции механизма
 кг
кг м^2
м^2
Полный момент инерции на валу двигателя:
 =0,0029
+
=0,0029
+

 0,0029 кг·м2.
0,0029 кг·м2.
Таким образом, выбранный электродвигатель обеспечивает требуемые параметры движения и нагрузки механизма и принимается для дальнейшего расчета.
2.2. Составление схемы силовой части преобразователя
2.2.1 Выбор силовых полупроводниковых приборов
В соответствии с заданием для питания электродвигателя используем транзисторный широтно-импульсный преобразователь (ШИП) с поочередной коммутацией силовых транзисторов.
2.2.1. Расчетная схема системы преобразователь-двигатель изображена на рис.3. Широтно-импульсный преобразователь состоит из трехфазного выпрямителя UZ, транзисторов VT1,..,VT4 и обратных диодов VD1,..,VD4. Для снижения пульсаций тока последовательно с якорем двигателя M включен дроссель с индуктивностью L·др. Сигнал обратной связи по току якоря формируется с помощью шунта (R.ш) с выходным напряжением Uш = 100 мВ при токе Iш = 10 А . Сопротивление шунта
Rш= Uш / Iш=0,1 / 10 = 0,01 Ом.
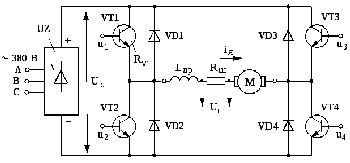
Рис. 3. Схема силовой части электропривода
В качестве ключей в ШИП используются транзисторы с напряжением насыщения Uнас = 2 В при токе коллектора Iк = 25 А. Сопротивление такого ключа
RVT = Uнас / Iк = 2./.25 = 0,08 Ом.
Параметры выбранного электродвигателя приведены в табл. 4.
Полное сопротивление якорной цепи при двух открытых транзисторах
Rя = Rя.д + 2RVT + Rш = 1,15 + 2·0,08 + 0,01 = 1,32 Ом.
Величина пульсаций якорного тока определяется по формуле [1]
 ,
(2.2)
,
(2.2)
где Ud = 110 В – напряжение питания ШИП, γ – относительная продолжи-тельность импульсов, Lя – полная индуктивность якорной цепи, fк – частота коммутации, Kк – коэффициент зависящий от способа коммутации транзисторов; рассматриваем случай поочередной коммутации, для которой Kк = 1.
Принимаем: γ = 0,5 (наибольшие пульсации), fк = 12000 Гц,
ΔI = 0,075· Iном = 0,075·7,5 = 0,5625 А.
Тогда из формулы (П4-1) получим:
 =
0,0033 Гн. (2.3)
=
0,0033 Гн. (2.3)
Требуемая индуктивность дросселя
Lдр = Lя – Lя.д = 0,00407407 – 0,00402 = 0,00005407 Гн. (2.4)
При несимметричном режиме непрерывно коммутируется только одна пара транзисторных ключей, а вторую пару используют при изменении направления вращения. Этот режим обеспечивает на якоре однополярные импульсы напряжения. Пульсация тока якоря при несимметричном режиме вдвое меньше, чем при симметричном режиме.
Управление ШИП осуществляется широтно-импульсным модулятором (ШИМ). Назначение ШИМ заключается в преобразовании непрерывного входного воздействия в прямоугольные импульсы с переменной длительностью, пропорциональной управляющему напряжению.
2.3. Регуляторы и датчики положения
2.3.1. Регуляторы
В разрабатываемом следящем электроприводе применяем аналоговые регуляторы. Аналоговые пропорциональный (П) и пропорционально-интегральный (ПИ) регуляторы строят на основе операционных усилителей (ОУ), охваченных отрицательной обратной связью [1]. При достаточно высоком коэффициенте усиления ОУ передаточная функция такого регулятора определяется выражением
 ,
,
где
 ,
, – операторные сопротивления входной
цепи и цепи обратной связи регулятора.
– операторные сопротивления входной
цепи и цепи обратной связи регулятора.
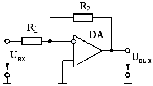
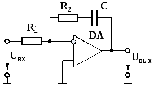
Схемы пропорционального регулятора (П-регулятора) и пропорционально-интегрального регулятора (ПИ-регулятора) изображены на рис. 4.
а) б)
Рис. 2.3. Схемы регуляторов: а) П-регулятор, б) ПИ-регулятор
Передаточные функции регуляторов:
П-регулятор
–
 ;
;
ПИ-регулятор
–
 .
.
2.3.2. Измерительный преобразователь перемещения
Информация о текущем положении рабочего органа в СЭП формируется с помощью измерительных преобразователей перемещения (ИПП).
Применим
цифровой преобразователь перемещений,
содержащий импульсный фотоэлектрический
датчик и реверсивный счетчик импульсов.
Круговой фотоэлектрический датчик
присоединен к выходному валу механизма
и вырабатывает 1024 импульса на 1 оборот.
Выходной величиной преобразователя
является количество импульсов Nφ,
пропорциональное угловому перемещению
вала φ. Коэффициент передачи такого
преобразователя
= 163 имп/рад.
3. Расчет параметров сэп на основе оптимальных настроек
3.1. Структурная схема следящей системы
3.1.1. Функциональная схема следящего электропривода
Функциональная схема следящего электропривода, выполненного по системе подчиненного регулирования, изображена на рис. 3.1. Питание якоря электродвигателя M осуществляется от полупроводникового преобразователя U. Сигнал обратной связи по току якоря снимается с датчика тока BA и поступает на регулятор тока РТ. Обратная связь по скорости выполнена с помощью тахогенератора BR и регулятора скорости РС, а обратная связь по положению – с помощью координатного датчика BE и регулятора положения РП.
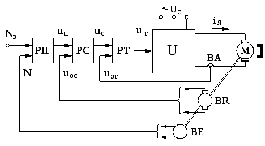
Рис. 3.1. Функциональная схема следящего электропривода
Структурная схема СЭП изображена на рис. 3.2 для случая установки датчика положения на рабочем узле механизма. На схеме двигатель постоянного тока (ДПТ) представлен в виде соединения апериодического звена с передаточной функцией Wя.(p), звеньев с коэффициентом передачи c и интегрирующим звеном с операторной механической проводимостью Yмех(p):
 ;
;
 ,
, ,
, ,
(3-1)
,
(3-1)
где Lя, Rя – индуктивность и сопротивление всей якорной цепи,J – полный момент инерции на валу электродвигателя.
Выходной переменной структурной схемы является координата рабочего механизма – перемещение стола x или угол поворота выходного вала механизма φ. Связь выходной величины со скоростью двигателя описывается уравнениями:
 .
(3-2)
.
(3-2)
В системе имеются три замкнутых контура – контур тока, контур скорости и контур положения.
Контур тока является внутренним контуром и состоит из объекта регули-рования – цепи якоря двигателя, силового преобразователя и регулятора тока РТ. Коэффициент преобразования цепи обратной связи по току равен Kт.
Контур скорости воздействует на замкнутый контур тока и звено, описывающее механическую проводимость двигателя Yмех(p). Контур замыкается обратной связью по скорости с передаточной функцией WДС(p) =Kс.
Контур положения является внешним контуром и включает в себя замкнутый контур скорости, механическое звено с передаточной функцией Wпер(p) =Kпер/p и звено обратной связи по положению WДП(p) =KДП.
В системе подчиненного регулирования применяют пропорционально-интегральные (ПИ) регуляторы тока и скорости. Рассмотрим стандартные настройки следящего электропривода с ПИ-регуляторами тока и скорости.
3.1.2. Параметры передаточных функций электродвигателя и механизма
После вычисления физических параметров привода – Lя, Rя, J определяем параметры передаточных функций электродвигателя и механизма:
 ,
,
 ,
, .
.
По формулам (3-1) получаем:
 =
0,0025с;
=
0,0025с;
 =
0,009 с;
=
0,009 с;
 =
4,527 1/(Нм·с).
=
4,527 1/(Нм·с).
Коэффициент передачи механизма определяем на основании уравнения (3-2):
 =
0,00021 м = 0,21 мм.
=
0,00021 м = 0,21 мм.
3.1.3. Параметры передаточной функции широтно-импульсного преобразователя
Параметрами передаточной функции широтно-импульсного преобразователя являются коэффициент передачи Kп и постоянная времени τ:
 .
.
На входе ШИП установлен фильтр первого порядка, поэтому τ = 0,001 с.
Для определения коэффициента передачи ШИП примем, что номинальное напряжение на его выходе Uп.н = 110 В возникает при номинальном выходном напряжении РТ U.РТ.н = 10 В. Тогда получим:
 =11.
=11.
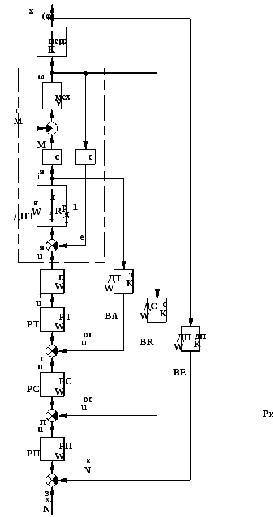
Рис. 6 Структурная схема следящего электропривода
3.2. Настройка регулятора тока на технический оптимум
Проверим условие (3-4) настройки контура тока на технический оптимум
 ;
;
 ;
0,0115>0,005.
;
0,0115>0,005.
Как
видим, условие выполняется, поэтому
можно использовать стандартные настройки
контура тока. При стандартной настройке
мы пренебрегаем внутренней обратной
связью двигателя по ЭДС, объект
регулирования контура тока представляет
собой преобразователь и цепь якоря
двигателя и имеет передаточную функцию
 .
.
Перед вычислением параметров регулятора необходимо определить коэффициент передачи обратной связи по току Kт. Соответствующее устройство может быть выполнено на основе шунта в якорной цепи электродвигателя, блока гальванической развязки и нормирующего усилителя сигнала. Максимальное значение тока в якорной цепи определяется перегрузочной способностью двигателя ДК1-3,5-100АТ, который может кратковременно выдерживать перегрузку по току 8·Iном . Примем выходной сигнал нормирующего усилителя
Uот.max = 10 В при максимальном токе якоря Iя.max=60 А. Тогда получим:
 =0,167
В/А.
=0,167
В/А.
Затем по формулам находим:
 =
0,0025 с;
=
0,0025 с;
 =
0,89820.
=
0,89820.
3.3. Настройка регулятора скорости на симметричный оптимум
В процессе регулирования максимальная возможная скорость ЭД равна скорости идеального холостого хода ωд.0, поскольку магнитный поток двигателя постоянен. Примем, что при этой скорости напряжение обратной связи равно Uос.max = 10 В. Такое значение получается с помощью делителя напряжения, подключенного к выходу тахогенератора, так как номинальное напряжение встроенного тахогенератора равно 30 В.
Найдем скорость
 =
111,1 1/с.
=
111,1 1/с.
Тогда значение коэффициента
 =
0,09 В·с.
=
0,09 В·с.
При настройке контура тока на технический оптимум передаточная функция разомкнутого контура скорости выражается приближенной формулой:
 .
.
Параметры регулятора скорости выбираем в соответствии с симметричным оптимумом. Используя формулы, получаем:
 =8·0,001
= 0,008 с;
=8·0,001
= 0,008 с;
 =1,708.
=1,708.
3.4. Настройка пи-регулятора положения
Принимаем, что для создания обратной связи по положению в системе используется синусно-косинусный вращающийся трансформатор (ВТ), работающий в режиме фазовращателя или в трансформаторном режиме [1].
С помощью фазового детектора [1] выделяется напряжение ошибки, пропорциональное разности фаз:
 .
.
Здесь
 –
амплитуда напряжения ВТ,
–
амплитуда напряжения ВТ, –
коэффициент передачи звена
–
коэффициент передачи звена на рис. 3.2
на рис. 3.2
Обозначив
 ,
,
 ,
, ,
,
получим напряжения, аналогичные переменным Nx.з, Nx в схеме на рис. 4.1.
При диапазоне преобразования фазового детектора, равном ±π, максимальное выходное напряжение фазового детектора – напряжение ошибки u.ε.max = 10 В соответствует разности фаз (φ.в.з – φ.в)max = π, поэтому
 =3,18
В/рад.
=3,18
В/рад.
Для
выбора значения добротности воспользуемся
АЧХ следящего привода (см. рис. 3.3). Для
получения апериодического переходного
процесса выбираем относительное значение
добротности
 0,25.
Ему соответствует коэффициент
0,25.
Ему соответствует коэффициент
 =
0,0107.
=
0,0107.
4. Моделирование переходных процессов следящего электропривода
4.1. Подготовка структурной схемы модели
Моделирование переходных процессов проводим с помощью программного средства VisSim. Для этого составляем структурную схему модели следящего электропривода. Параметры звеньев приведены в табл. 4.1.
Числовые
значения параметров округлены до трех
значащих цифр, например: T
= 0,06666… 0,0667.
0,0667.
Таблица 4.1
Параметры следящего электропривода
|
Параметр |
Kрп |
Kрс |
Tрс |
Kрт |
Tрт |
Kп |
τ |
Kпер |
|
Единица измерения |
|
|
с |
|
с |
|
с |
м |
|
Значение |
0,0107 |
1,708 |
0,008 |
0,89820 |
0,0025 |
11 |
0,001 |
0,00021 |
|
Параметр |
Rя |
Lя |
c |
J |
Tя |
Tм |
Kт |
Kс |
Kдп |
|
Единица измерения |
Ом |
Гн |
В•с |
г•м2 |
с |
с |
В/А |
В•с |
|
|
Значение |
1,32 |
0,0033 |
0,54 |
0,0029 |
0,0025 |
0,009 |
0,167 |
0,09 |
163 |
Для моделирования регуляторов, преобразователя и электродвигателя создаем составные блоки, что позволяет сделать схему модели более компактной и наблюдаемой. Структурная схема модели СЭП приведена на рис. 4.1.
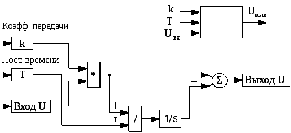
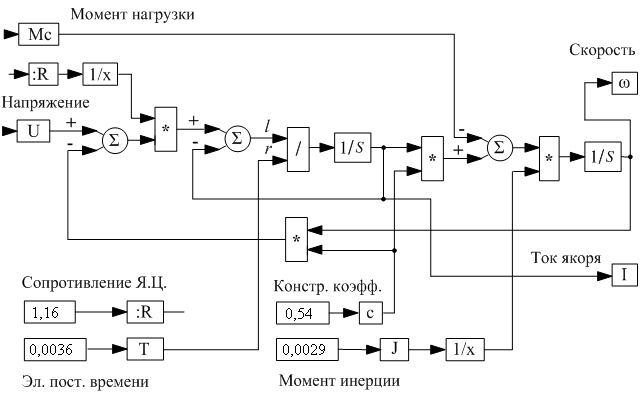
Рис. 4.1 Структурные схемы составных блоков:
а – ПИ-регулятор, б – электродвигатель

Ошибка

Координата

Ток

Скорость
4.2. Графики переходных процессов



Скорость
Координата
Ток
Рис 4.2. Графики переходных процессовсистемы.
4.3. Логарифмические частотные характеристики
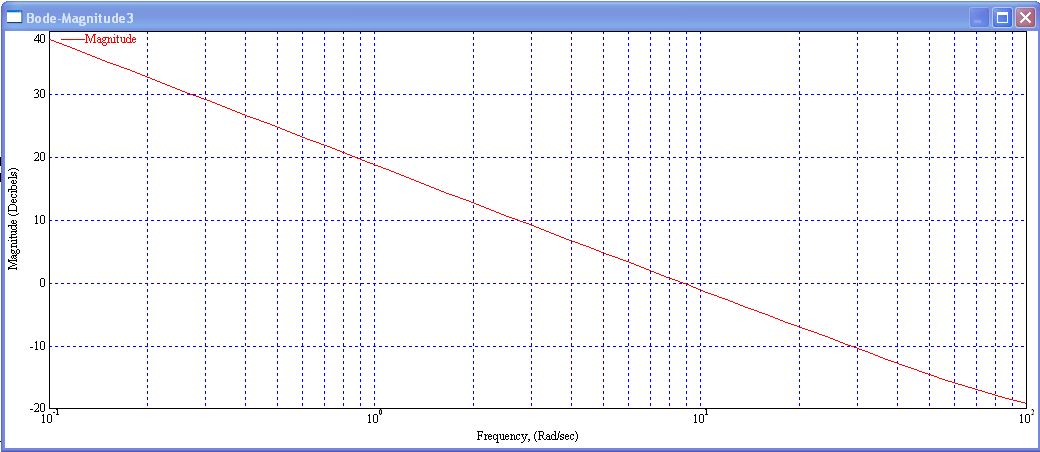
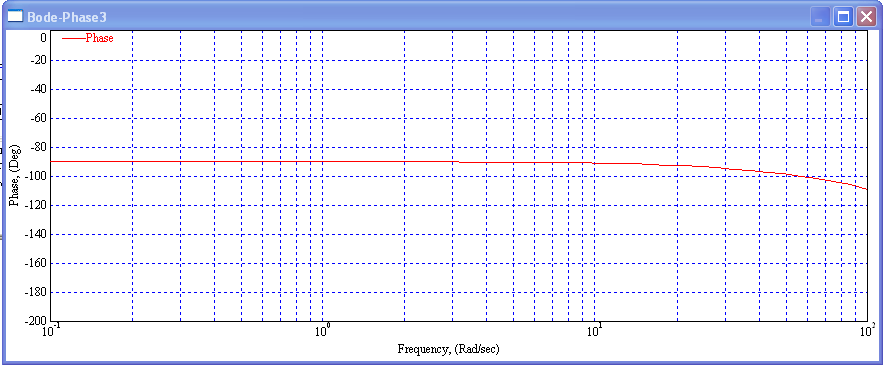
Рис 4.3. ЛАЧХ (верхний график) и ЛФЧХ (нижний график) системы.
Заключение
В данной курсовой работе объектом проектирования явился электропривод станочного типа ДК1-3,5-100АТ, для которого использовалась методика расчета мощности электродвигателя на основе заданной нагрузочной диаграммы механизма. Была построена следящая система на основе принципа подчиненного регулирования, поэтому в объем работы вошел расчет параметров регуляторов и анализ системы. Моделирование системы выполнено с использованием программного средства VisSim путем изучения реакций электропривода при отработке типовых воздействий.
Библиографический список
Нуждов, В.М. Следящий электропривод: учебное пособие к курсовой работе / 2003 г.
Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990. – 304 с.
Проектирование следящих систем. Физические и методические основы / Под общ. ред. Н.А.Лакоты. – М.: Машиностроение, 1992. – 352 с.
Приложения
Приложение 1
Таблица П1
Параметры электродвигателей постоянного тока
|
Параметр |
Обо-зна-чение |
Ед. изме- рения |
Тип электродвигателя | |||||
|
2ПБВ-100M |
ДК1-2,3-100АТ |
ДК1-3,5-100АТ |
ДПУ127- 220-1-30 |
ДПУ127-450-2-57 |
МИГ-550ДТ | |||
|
Номинальный момент |
Mном |
Нм |
7,5 |
2,3 |
3,5 |
2,1 |
4,3 |
0,876 |
|
Номинальная скорость |
nном |
об ___ мин |
1000 |
1000 |
1000 |
1000 |
1000 |
6000 |
|
Номинальная мощность |
P2н |
Вт |
750 |
240 |
370 |
220 |
450 |
550 |
|
Номинальное напряжение |
Uном |
В |
52 |
48 |
60 |
30 |
57 |
110 |
|
Номинальный ток |
Iном |
А |
20 |
7,5 |
7,5 |
11 |
11 |
6,2 |
|
Максимальный момент |
Mмакс |
Нм |
70 |
14,1 |
24,5 |
15 |
38 |
– |
|
Момент инерции якоря |
Jд |
г·м2 |
9,4 |
2,7 |
2,9 |
2,8 |
4,9 |
0,15 |
|
Сопротивление якоря |
Rя.д |
Ом |
0,22 |
0,95 |
1,15 |
0,36 |
0,54 |
1,24 |
|
Индуктивность якоря |
Lя.д |
мГн |
1,18 |
2,7 |
4,02 |
1,6 |
2,7 |
1,5 |
|
Конструктивная постоянная |
c |
В·с |
– |
– |
– |
– |
– |
0,163 |
|
Электромеханическая постоянная времени |
Tм.д |
мс |
13,5 |
20 |
15 |
25 |
50 |
7 |
|
Электромагнитная постоянная времени |
Tя.д |
мс |
5,3 |
3 |
3,5 |
3,2 |
3,8 |
1,2 |
|
Номинальное напряжение тахогенератора |
Eтг |
В |
10 |
10 |
10 |
10 |
10 |
30 |
|
Масса |
mд |
кг |
29 |
18 |
20 |
12 |
16 |
– |