

8 Описание гидролокатораsr-240
8.1 Основные характеристики гидролокатора
Имитатор гидролокатора SR240обеспечивает имитацию режимов работы и отображения информации одного из наиболее сложных рыбопоисковых гидролокаторов кругового обзора, выпускавшихся фирмойSimrad(Норвегия).
Гидролокатор SR240имеет сферическую антенну, обеспечивающую возможность получения информации о подводной обстановке с любого направления нижней полусферы. Цветной монитор и встроенный компьютер обеспечивают большую наглядность представления информации, реализацию широкого набора режимов работы гидролокатора и гибкость управления этими режимами.
Рабочая частота гидролокатора 23,75 кГц.
Минимальный диапазон 200 м, максимальный – 6400 м.
Дальность обнаружения подводных объектов с силой цели 0 дБ достигает при благоприятных условиях 3000 м.
Ширина характеристики направленности в режиме приема 1212, в режиме излучения 1212или 12360.
Электронный наклон веера характеристик направленности обеспечивается от +10до минус 90.
Для отображения эхо-сигналов в зависимости от их интенсивности используется 32-цветная палитра. Гидроакустическая и служебная информация представляются на цветном мониторе с размером диагонали 20и разрешением 512680 пикселей. Кроме того, в секторе от 11до 99(с ориентацией в любом азимутальном направлении) обеспечивается звуковая индикация эхо-сигналов на частоте от 689 до 1033 Гц.
Антенна гидролокатора SR240 может опускаться на 1,2 м ниже корпуса судна, а максимальная скорость судна в этом положении может достигать 15 уз.
8.2 Режимы работы гидролокатора
В гидролокаторе уделяется большое значение представлению общей картины отображения сигналов (промысловой ситуации) в районе водного пространства вокруг и ниже судна. Возможны девять различных режимов отображения, обеспечивающих пользователю гибкий выбор в широком диапазоне применений:
1) Нос вверх;
2) Север вверху;
3) Истинное движение;
4) 180по горизонту / аудио канал;
5) 180по горизонту / эхолот;
6) 180по горизонту / 180по вертикали;
7) 270по горизонту / 90по вертикали;
8) Круговой обзор / 180по вертикали;
9) Круговой обзор / 90по вертикали / эхолот.
Выбор режима выполняется посредством электронного меню. Для этой цели в поле меню есть подменю для выбора режима работы MODE.
В режиме BOW UP (НОС ВВЕРХ) символ судна расположен неподвижно в центре экрана, при этом изображение носа судна направлено вверх (см. рис. 1). Индикация эхо-сигналов может охватывать диапазон 360вокруг судна и при установке режима OMNI (КРУГОВОЙ ОБЗОР) все эхо-сигналы будут корректироваться для каждой посылки. Расстояние от символа судна до границы круга с отметками эхо-сигналов равно выбранному диапазону.
Перемещение эхо-сигналов по экрану учитывает курс и скорость судна и собственное движение целей. На рис. 1 представлен режим НОС ВВЕРХ с рыбным косяком в ручном и автоматическом режиме слежения за целью.
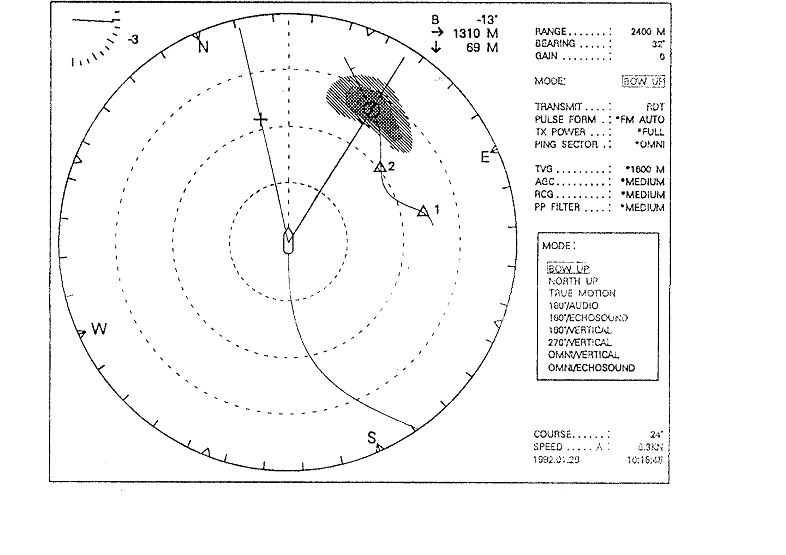
Рис. 1
В режиме NORTH UP (СЕВЕР ВВЕРХУ) направление на истинный север всегда вверх, а символ судна неподвижен в центре экрана, при этом нос судна направлен по курсу судна (см. рис. 2). Эхо-сигналы будут также перемещаться здесь по экрану соответственно курсу и скорости судна, и как видно на рисунке, за судном и целью могут отображаться соответствующие линии курса. Курс и скорость судна, а также дата и время, указаны в нижней части поля меню.
Индикатор угла наклона отображается в верхнем левом углу. Пеленг, дистанция и глубина, соответствующие крестику перемещаемого курсора, отображаются вверху в правой стороне поля эхо-сигналов.
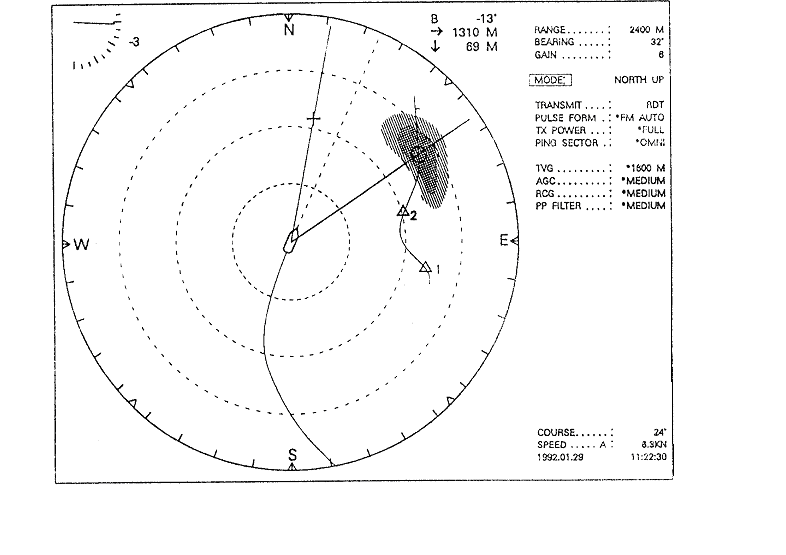
Рис. 2
В режиме ИСТИННОЕ ДВИЖЕНИЕ изображение привязано к географическому местоположению с истинным севером вверху (см. рис. 3).
Символ судна движется по экрану согласно показаниям курса и скорости. Все эхо-сигналы всегда находятся в правильном положении относительно судна и их перемещения на экране будут истинным воспроизведением перемещений целей в воде.
Когда символ судна окажется у края экрана, он будет автоматически перемещен в центр или в положение, определяемое кнопкой [DISPLAY CENTRE] (ЦЕНТР ДИСПЛЕЯ) при ее нажатии. Это положение восстанавливается в центре экрана всякий раз, когда меняется режим.
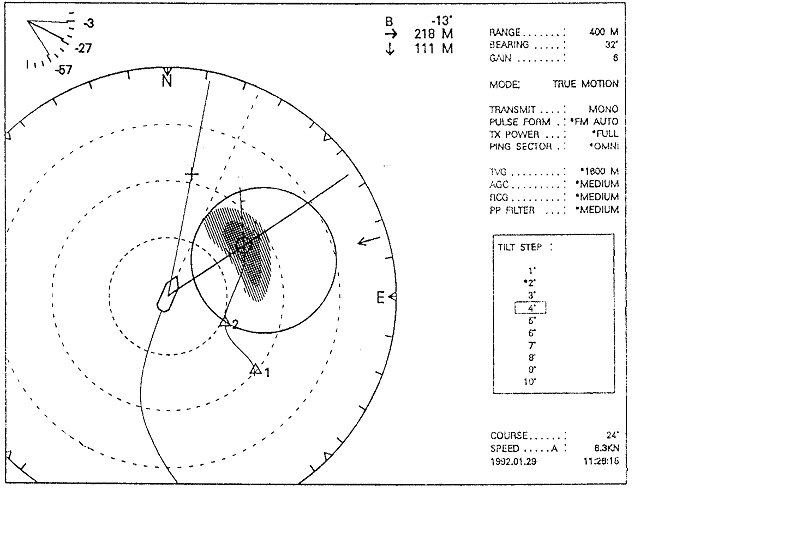
Рис. 3
В режиме 180/AUDIO ("180по горизонту / аудио канал") в верхней половине экрана отображается сектор 180по носу судна, а нижняя часть используется для записи аудио канала (см. рис. 4).
Аудио канал представляется в виде непрерывной белой линии в горизонтальной плоскости и может разворачиваться в любом направлении. Записанные эхо-сигналы - это непосредственная копия эхо-сигналов под белой линией аудио канала. Поскольку аудио канал записывается за какой-то период времени, этот режим особенно удобен при обнаружении слабых эхо-сигналов в присутствии реверберации или шума.
Запись последних 512 посылок хранится в памяти компьютера, даже если выбран другой режим. Это означает, что данную запись всегда можно воспроизвести при установке режима "180по горизонту / аудио канал ".
Следует учесть, что если установлен режим OMNI, облучаемый сектор останется 360, но воспроизведение будет только в секторе 180.
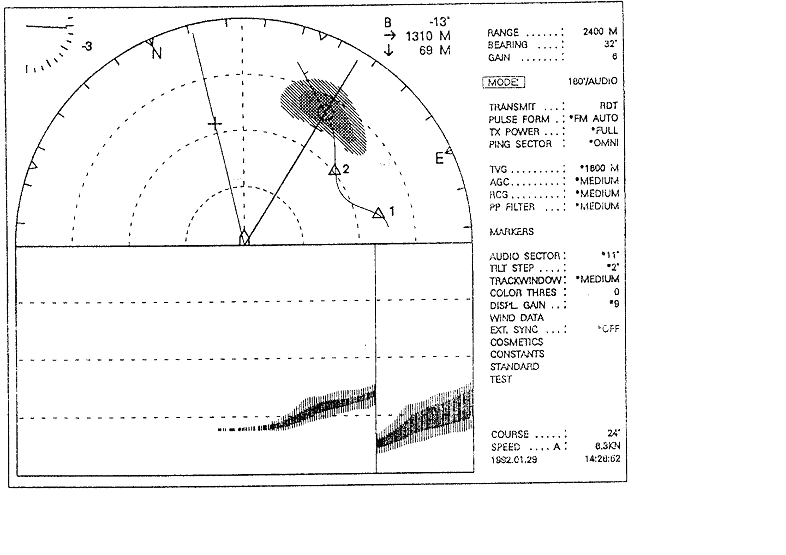
Рис. 4
В режиме 180/ ECHOSOUND ("180по горизонту / эхолот") в верхней половине экрана отображается сектор 180по носу судна, а нижняя часть используется для записи информации, поступающей с эхолота (см. рис. 5). Это означает, что гидролокатор действует поочередно как обычный гидролокатор и как эхолот для каждой второй посылки.
Диапазон работы эхолота можно выбрать отдельно в меню. При установке данного режима нижняя часть экрана будет вначале темной, а затем запись будет выстраиваться на экране справа налево с сохранением последних 512 посылок.
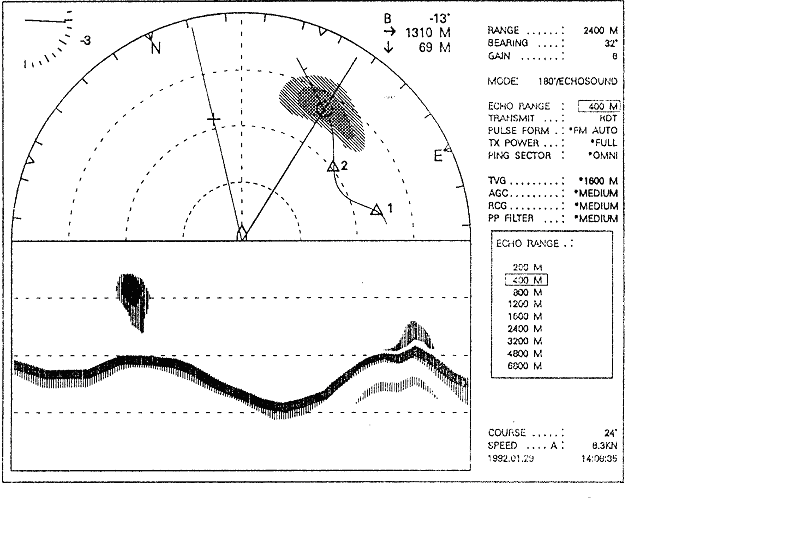
Рис. 5
В режиме 180/VERTICAL ("180по горизонту/180по вертикали") в верхней половине экрана представлен сектор 180по носу судна, а нижняя часть используется для представления информации в вертикальном разрезе (см. рис. 6). Таким образом, эхо-сигнал может быть представлен одновременно и в горизонтальном, и в вертикальном измерениях.
Пеленг вертикального разреза показан в горизонтальной плоскости белой линией аудио канала и может разворачиваться на любой угол с помощью ручки ручного наведения по горизонтали.
Белая линия аудио канала отображает переднюю часть вертикального разреза в секторе 180и всегда предварительно устанавливается справа в вертикальном отображении, в то время как задняя часть - слева.
Диапазон вертикального разреза может быть выбран в меню подобно основным диапазонам гидролокатора или может быть установлен отдельно (см. подменю VERT.RANGEна рис. 6).
В дополнение к обычному индикатору наклона угол наклона также изображается на вертикальном разрезе двумя белыми линиями. Таким способом легко можно выбрать оптимальный угол наклона по эхо-сигналам в вертикальном разрезе и получить наиболее четкий рисунок эхо-сигнала в горизонтальном отображении.
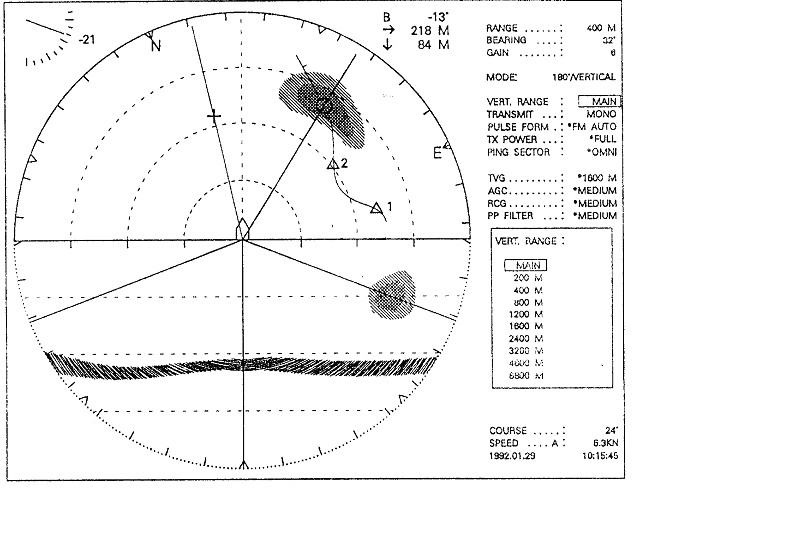
Рис. 6
Режим 270/VERTICAL ("270по горизонту / 90по вертикали") специально предназначен для ведения кошелькового лова. В этом режиме половина вертикального разреза отображается в нижнем левом углу при обычном замете невода по правому борту (см. рис. 7). Если замет невода должен выполняться по левому борту, половина вертикального разреза будет отображаться в нижнем правом углу.
С помощью такого режима отображения легко поддерживать контакт с косяком как при вертикальном, так и при горизонтальном представлении информации, а также легко определять размерное распределение косяка. Положение косяка относительно дна - это еще одна важная информация в данном режиме отображения.
На рис. 7 представлен типичный пример ситуации лова посредством кошелькового невода. При отображении в горизонтальной плоскости виден круг невода, а также линия курса цели и судна. В верхнем правом углу указан основной диапазон, который составляет 400 м.
Диапазон вертикального разреза в данном примере составляет 200 м. На разрезе представлено детальное отображение косяка и дна. Нижняя штриховая линия указывает общую глубину невода.
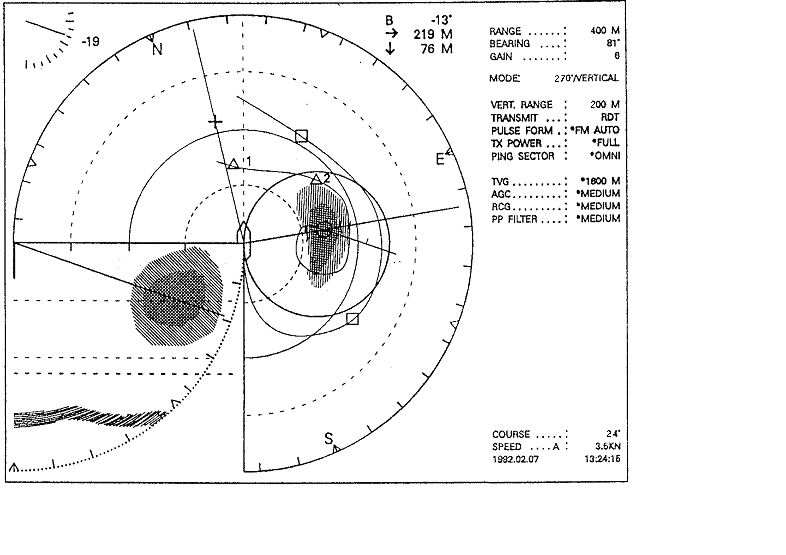
Рис. 7
Режим OMNI/VERTICAL ("Круговой обзор/180по вертикали") специально предназначен для ведения тралового лова и обеспечивает полное представление о ситуации лова как в горизонтальной, так и в вертикальной плоскостях (см. рис. 8).
Пеленг вертикального разреза на правой стороне такой же, как и в режиме "180по горизонту / 180по вертикали", и обозначается белой линией аудио канала.
Символ трала можно включить в картину отображения эхо-сигналов тремя способами:
- вручную с помощью кнопки GEAR;
- автоматически на правильной глубине при подключении к траловому гидролокатору FS 3300 фирмы Simrad (в тренажере не моделируется);
- автоматически на правильной глубине при подключении к траловой системе ITI фирмы Simrad (в тренажере не моделируется).
На рис. 8 дан типичный пример разноглубинного тралового лова. В данном случае вертикальный разрез с правой стороны привязан к рыбному косяку, а разрез с левой стороны - к символу трала. Вертикальное раскрытие трала изображено двумя штрих пунктирными линиями в вертикальном представлении информации.
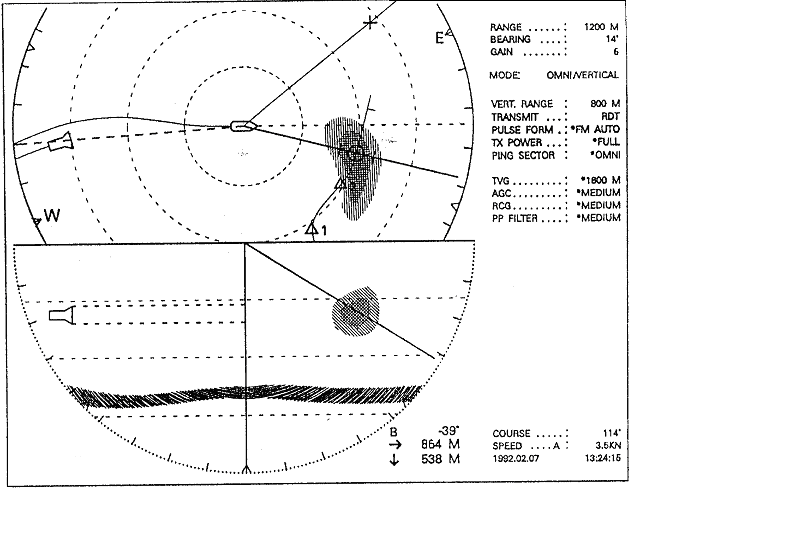
Рис. 8
Режим OMNI/ECHOSOUND ("Круговой обзор / 90по вертикали/эхолот") специально предназначен для ведения тралового лова, но в этом режиме вертикальный разрез с привязкой к тралу заменен на запись информации, поступающей с эхолота (см. рис. 9). Это обеспечивает более точную индикацию глубины в том случае, когда луч гидролокатор отклоняется вследствие рефракции.
Для того, чтобы получить представление о косяке с помощью эхолотной записи, судно должно пройти над целью.
На рис.9 дана типичная ситуация разноглубинного тралового лова, где установлен автоматический режим наклона.
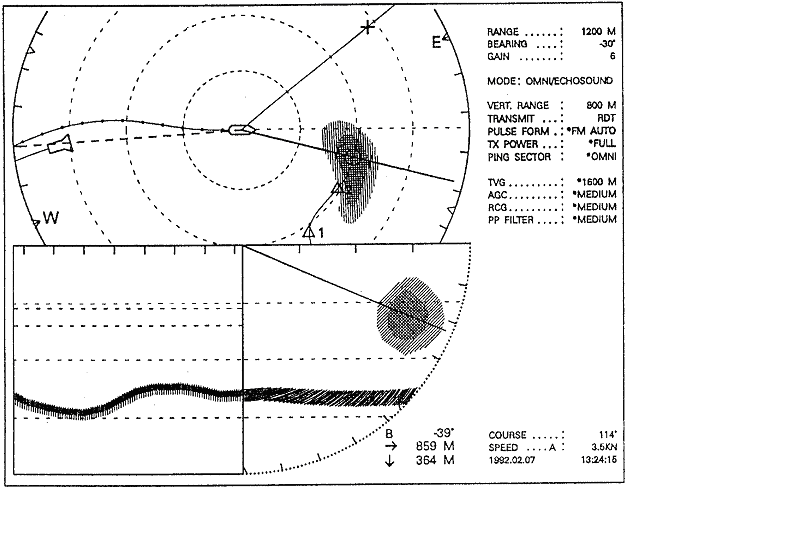
Рис. 9