

2.23. Сложное движение точки
В ряде случаев при решении задач механики оказывается целесообразным (а иногда и необходимым) рассматривать движение точки (или тела) одновременно в двух системах отсчёта, из которых одна остается условно неподвижной, а другая определённым образом движется по отношению к первой. Движение, совершаемое при этом точкой (или телом), называется сложным. Например, шар, катящийся по палубе движущегося парохода, можно считать совершающим по отношению к берегу сложное движение, состоящее из качения по отношению к палубе, с которой связана подвижная система отсчёта OXYZ, и движения вместе с палубой по отношению к берегу, с которым связана неподвижная система отсчёта O1X1Y1Z1. Таким путем сложное движение шара разлагается на два более простых и более легко исследуемых. Возможность разложения сложного движения точки на более простые путём введения дополнительной (подвижной) системы отсчёта широко используется в кинематических и динамических расчётах.
Введем следующие понятия, применяемые в сложном движении точки.
Движение точки по отношению к неподвижной системе отсчёта O1X1Y1Z1 называется абсолютным и характеризуется абсолютной скоростью V и абсолютным ускорением а (рис. 2.41).
Положение точки на траектории абсолютного движения определяется тремя зависящими от времени координатами, которые называются уравнениями абсолютного движения:
X1 = f1(t);
Y1 = f2(t);
Z1 = f3(t).
З
Рис. 2.41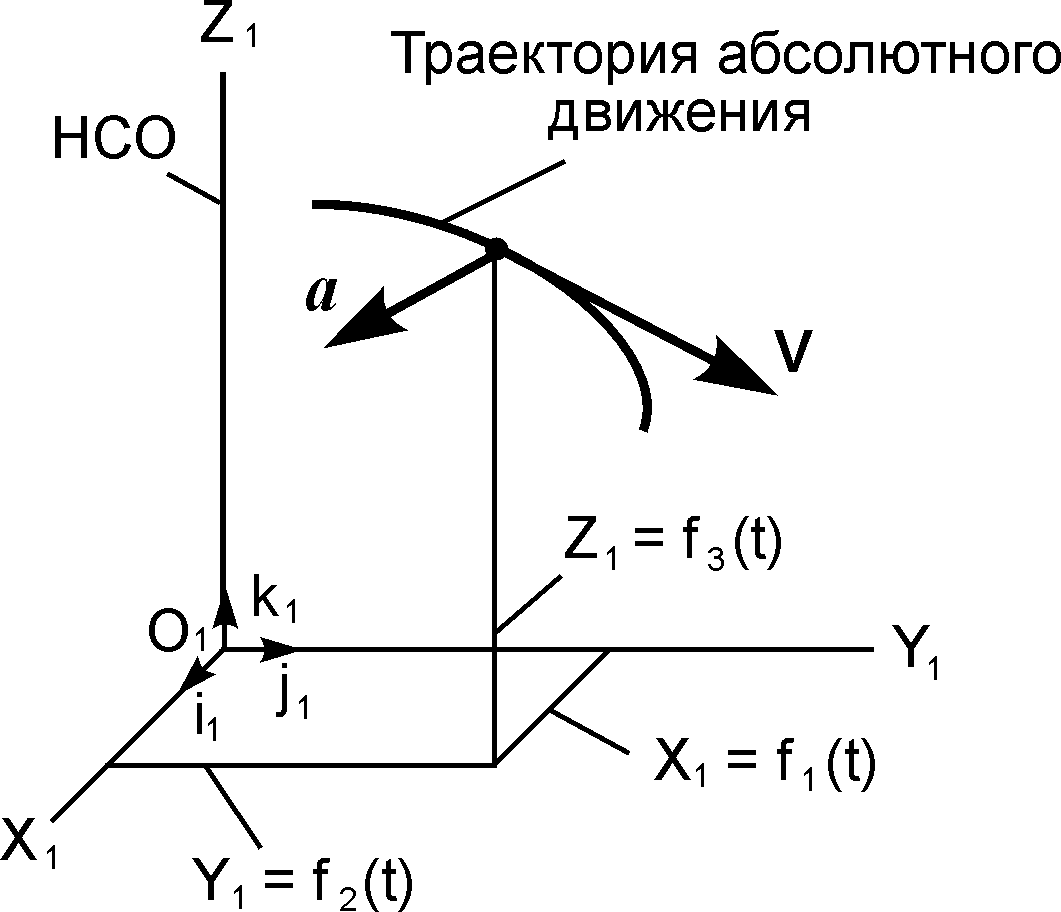
![]() ;
;
cos(V,
i)![]() cos(V,
j
)
cos(V,
j
)![]() cos(V,
k
)
cos(V,
k
)![]()
а =
![]()
cos(а,
i1)
=
![]() /
а;
cos(а,
j1)
=
/
а;
cos(а,
j1)
=
![]() /
а;
cos(а,
k1)
=
/
а;
cos(а,
k1)
=
![]() /
а.
/
а.
Движение точки по отношению к подвижной системе отсчёта OXYZ называется относительным движением и характеризуется относительной скоростью Vr и относительным ускорением ar (рис. 2.42).
Положение точки на траектории относительного движения определяется тремя зависящими от времени координатами, которые называют уравнениями относительного движения:
X = f4(t);
Y = f5(t);
Z = f6(t).
З
Рис. 2.42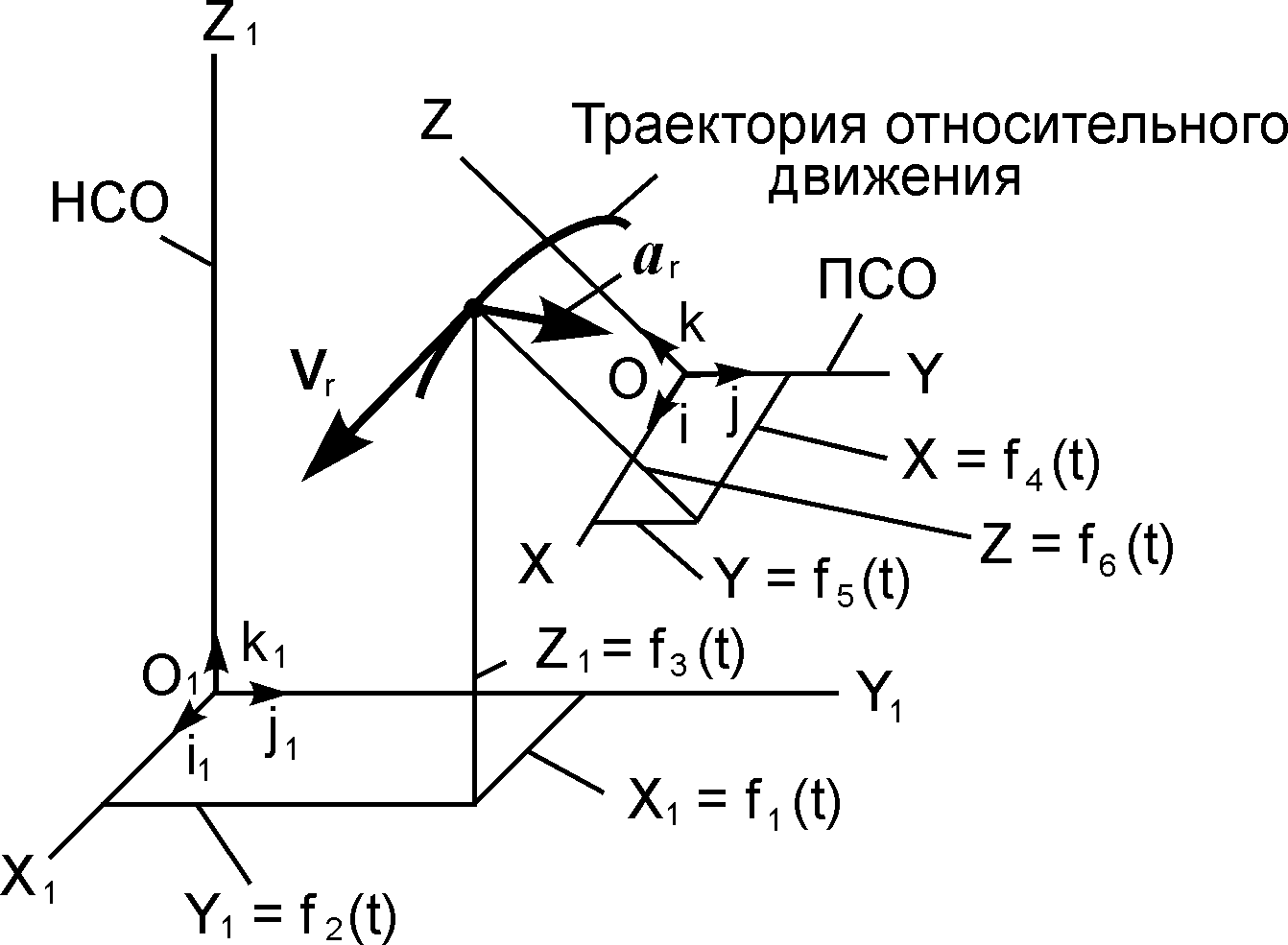
![]()
cos(Vr,
i)
![]() cos(Vr,
j)
cos(Vr,
j)![]()
cos(Vr,
k)![]()
ar
=
![]()
cos(ar,
i)
=
![]() /
ar;
cos(ar,
j)
=
/
ar;
cos(ar,
j)
=
![]() /
ar;
/
ar;
cos(ar,
k)
=
![]() /
ar.
/
ar.
Пусть координаты точки в подвижной системе отсчёта OXYZ постоянны: X = C1 = const; Y = C2 = const; Z = C3 = const. При этом условии точка неподвижна относительно ПСО, которая совершает движение относительно НСО. Движение этой точки вместе с подвижной системой отсчёта OXYZ относительно неподвижной системы отсчёта O1X1Y1Z1 называется переносным движением, которое характеризуется переносной скоростью Ve и переносным ускорением ae (рис. 2.43).
Положение точки на траектории переносного движения определяется тремя зависящими от времени координатами, которые называют уравнениями переносного движения:
![]()
![]()
![]()
Рис. 2.43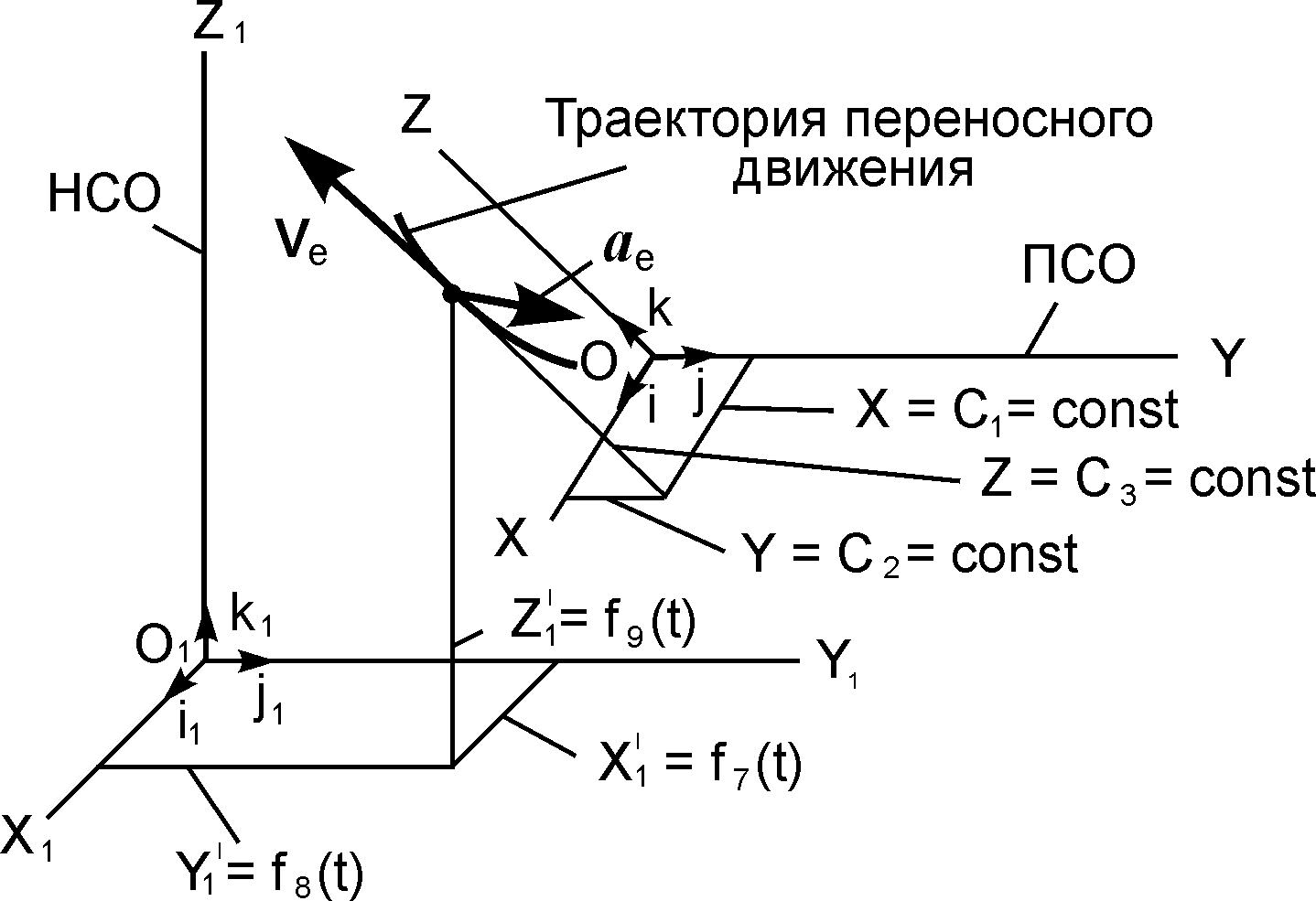
По известным уравнениям переносного движения находится переносная скорость Ve и переносное ускорение ae.
![]()
cos(Ve,
i)
=
![]() /
Ve;
/
Ve;
cos(Ve,
j)
=
![]() /
Ve;
/
Ve;
cos(Ve,
k)
=
![]() /
Ve;
/
Ve;
ae
=
![]()
cos(ae,
i)
=
![]() /ae;
/ae;
cos(ae,
j)
=
![]() /ae;
/ae;
cos(ae,
k)
=
![]() /ae.
/ae.
Н
Рис. 2.44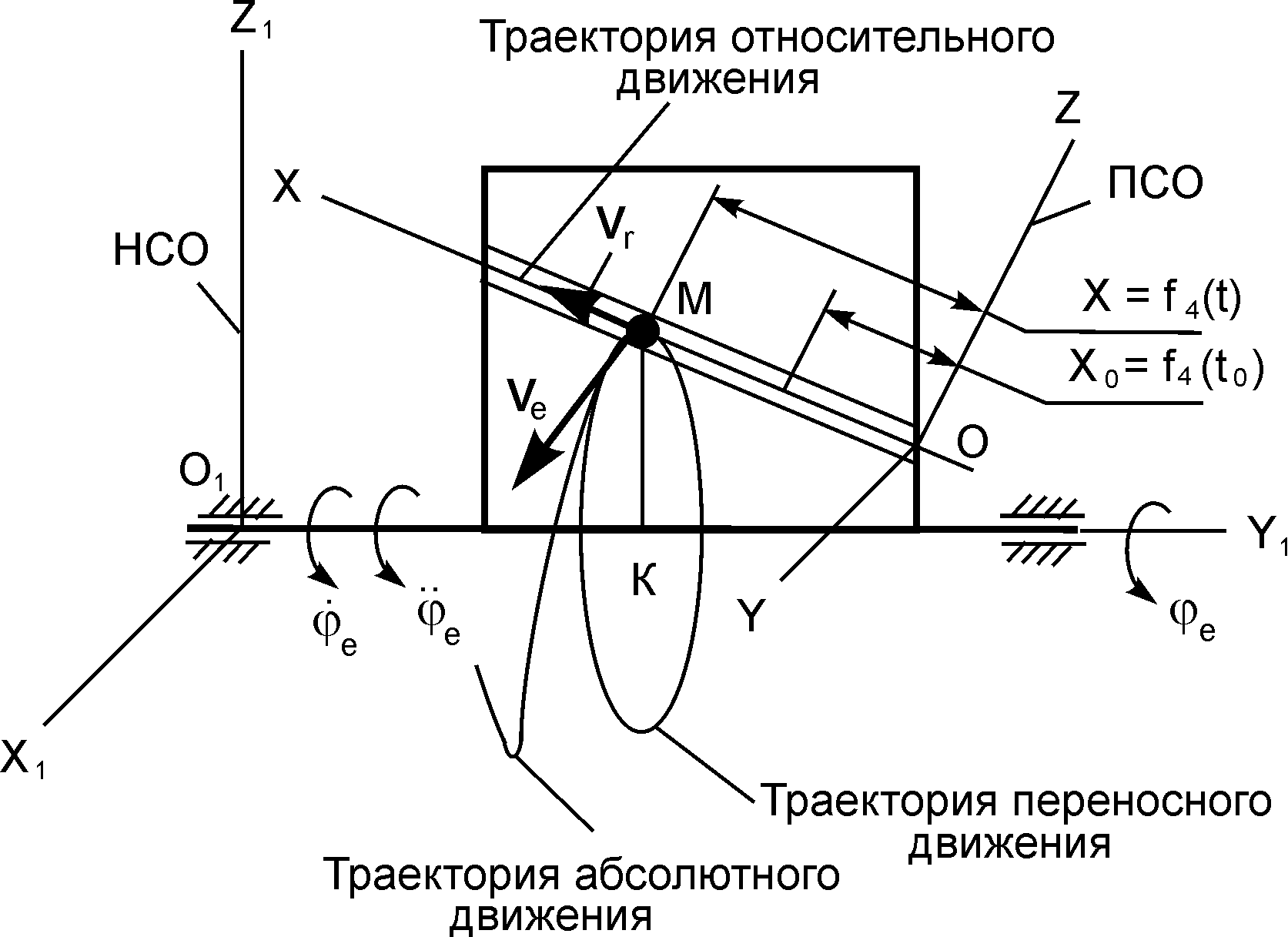
В
неподвижной системе отсчёта O1X1Y1Z1
флажок вращается относительно оси O1Y1
с переносной угловой скоростью
![]() .
На флажке закреплена подвижная система
отсчётаOXYZ,
которая вращается с флажком относительно
оси O1Y1.
На флажке выполнен канал, по которому
движется точка М с относительной
скоростью Vr.
.
На флажке закреплена подвижная система
отсчётаOXYZ,
которая вращается с флажком относительно
оси O1Y1.
На флажке выполнен канал, по которому
движется точка М с относительной
скоростью Vr.
Траектория относительного движения – прямая линия ОА на флажке. Уравнение относительного движения задано Sr = f(t).
Для определения траектории переносного движения поступают следующим образом. Задают время t1 и определяют положение точки М на траектории относительного движения. Sr(t1) = const. Зафиксированная на траектории относительного движения точка М в момент времени t1 вместе с флажком описывает в неподвижной системе отсчёта O1X1Y1Z1 окружность радиусом МК. Эта окружность является траекторией переносного вращения. Необходимо отметить, что в другой момент времени t2 координата точки М на траектории относительного движения Sr(t2) будут иметь другое значение и, следовательно, траекторией переносного движения будет окружность с другим радиусом.
Если в каждый момент времени складывать относительное и переносное движения, то получим абсолютное движение. В рассматриваемом примере траекторией абсолютного движения является винтовая линия, сформированная на конусе, образованном прямой ОА на флажке при её вращении относительно оси O1Y1.