

4.2 Программы и законы регулирования
Программы
регулирования могут быть: временные ![]() и
параметрические
и
параметрические ![]()
Под законом регулирования понимают зависимость, по которой формируется регулирующее воздействие u(t) на объект из первичной информации: g(t) и/или x(t) и, возможно, f(t).
Законы регулирования бывают:
-
линейные ![]()
-
нелинейные ![]()
В лабораторной работе рассматриваются линейные законы, которые описываются линейной формой
![]() (4.1)
(4.1)
Она же в операторной форме записи
 . (4.2)
. (4.2)
Наличие в (4.2) чувствительности регулятора к пропорциональной и к интегральным составляющим в первичной информации, определяет тип регулятора:
1) П – пропорциональный;
2) И – интегральный;
3) ПИ – пропорционально-интегральный (изодромный);
4) ПД – пропорционально-дифференциальный;
5) и более сложные.
4.2.1 Пропорциональное регулирование
Пропорциональное закон регулирования имеет вид:
![]()
Тогда в разомкнутом состоянии система будет характеризоваться передаточной функцией
![]()
Рассмотрим уравнение ошибки

В
установившемся состоянии ![]() (все
производные равны нулю); Wo(p)ko; W(p)k1ko=k;
где k -
контурный коэффициент усиления
разомкнутой системы (при Wос(p)=1).
(все
производные равны нулю); Wo(p)ko; W(p)k1ko=k;
где k -
контурный коэффициент усиления
разомкнутой системы (при Wос(p)=1).
Таким образом, P-регулирование позволяет уменьшить установившуюся (статическую) ошибку, но только в 1+k раз, поэтому регулирование будет статическим. То есть при любом k , xуст≠0.
4.2.2 Интегральное регулирование
Интегральный закон регулирования имеет вид:
u(t) = Wрег(p) x(t) = k2/p x(t),
тогда в разомкнутом состоянии система будет характеризоваться передаточной функцией:
W(p) = Wрег(p) Wo(p) = k2/p Wo(p) .
Рассмотрим уравнение ошибки:
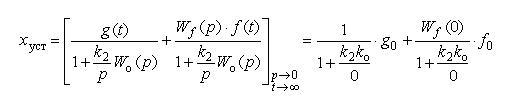
В установившемся режиме p→0, => W(p)→∞; => первая составляющая ошибки g0/∞→0. Ошибка от возмущения зависит от вида функции Wf (0) и может быть отлична от нуля.
Таким образом, I-регулирование позволяет исключить статическую ошибку в системе, т.е. система будет астатической по отношению к задающему воздействию g(t).
4.2.3 Интегральное регулирование по второму интегралу от ошибки
Двойной интегральный закон регулирования имеет вид:
u(t) = Wрег(p) x(t) = k3/p2 x(t),
тогда в разомкнутом состоянии система будет характеризоваться передаточной функцией:
W(p) = Wрег(p) Wo(p) = k3/p2 Wo(p) .
В этом случае система будет обладать астатизмом второго порядка - в ноль обратятся как постоянная составляющая ошибки, так и её скоростная составляющая (ошибка от помехи здесь не рассматривается):
Таким образом, повышение порядка астатизма приводит к увеличению установившейся точности САР, но делает систему более замедленной в действии.
На рисунке 4.4 показано, что, на сколько бы мал ни был коэффициент усиления пропорционального канала, и насколько большим бы ни был коэффициент усиления интегрального канала, для малых отклонений ошибки x(t) сигнал управления на объект u(t) интегральным каналом формируется менее интенсивно.
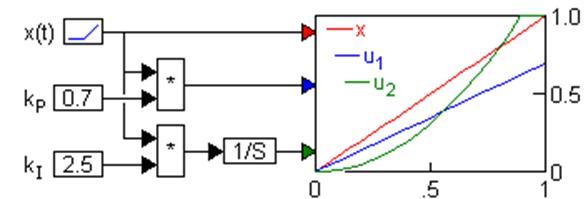
Рисунок 4.4 – Изменение сигналов управления при двойном интегральном законе регулирования
Здесь:

4.2.4 Изодромное регулирование
Изодромный закон регулирования имеет вид:
u(t) = Wрег(p) x(t) = (k1 + k2/p) x(t),
тогда в разомкнутом состоянии система будет характеризоваться передаточной функцией:
W(p) = Wрег(p) Wo(p) = (k1 + k2/p) Wo(p) .
В этом случае если p→0, то W→∞ и регулирование будет астатическим. Но если p→∞, то W(p) → k1ko=k и регулирование будет пропорциональным.
Отсюда следует, что PI-регулирование сочетает точность I-регулирования и быстродействие P-регулирования.
![]() 4.2.5
Регулирование с использованием
производных
4.2.5
Регулирование с использованием
производных
Регулирование с использованием одного канала, чувствительного к производной сигнала, не имеет самостоятельного значения, так как сигнал управления:
u(t) = Wрег(p) x(t) = k4 p x(t) ,
будет равен нулю при p→0 (т.е. в установившемся режиме). Поэтому обязательно наличие параллельного либо P, либо I-канала, а чаще обоих:
u(t) = (k1 + k2/p + k4 p) x(t).
В таком варианте регулятора управляющее воздействие будет образовываться даже, когда x(t)=0, но dx/dt≠0, то есть, наличие параллельного D-канала в регуляторе повышает быстродействие системы и снижает ошибки в динамике. На настоящий момент техническая реализация регуляторов, чувствительных к производным более высоких порядков, затруднена.