

5.1. Уравнение эйлера
Определим линейный функционал, L(y(x)), как линейную функцию в линейном пространстве со следующими свойствами.
1. L(y(x) + y1(x)) = L(y(x)) + L(y1(x))
2. L(y(x)) есть непрерывный функционал.
Например
L(y)
= dx,L(y)
=
dx,L(y)
= dx,
где
dx,
где — произвольная функция от
x.
— произвольная функция от
x.
Для экстремума дифференцируемых функций, определенных на линейных метрических пространствах, в точке экстремума первый дифференциал обращается в нуль. В применении к функционалам можно положить, что необходимое условие экстремума функционала — обращение в нуль его первого дифференциала.
Пусть
 есть функционал. Дифференциал функционала
есть функционал. Дифференциал функционала ,
заданного в некотором функциональном
пространстве (при переходе от функцииy(x)
к новой функцииy1(x)
должен быть линейным функционаломL(y1
–y), такой, чтоL(y1)
–L(y)
–L(y1–y) есть величина,
стремящаяся к нулю быстрее расстоянияr(y,y1), т. е.I(y1)
=I(y)L(y1–y) r(y,y1), гдестремится к нулю быстрее расстоянияr(y,y1). Обозначим
первый дифференциал функционалаI(y)
его вариациейI:
,
заданного в некотором функциональном
пространстве (при переходе от функцииy(x)
к новой функцииy1(x)
должен быть линейным функционаломL(y1
–y), такой, чтоL(y1)
–L(y)
–L(y1–y) есть величина,
стремящаяся к нулю быстрее расстоянияr(y,y1), т. е.I(y1)
=I(y)L(y1–y) r(y,y1), гдестремится к нулю быстрее расстоянияr(y,y1). Обозначим
первый дифференциал функционалаI(y)
его вариациейI:
I=L(y1 –y) (4.18)
Исследуем на экстремум функционал:

где
 ,
, — дважды дифференцирумая
функция своих аргументов, т. е. Fобладает непрерывными частными
производными до второго порядка
включительно по всем аргументам.y
=y(t)
— кривая, на которой функционалIпринимает определенное значение. Будем
полагать, чтоy =y(t)
обладает первой и второй непрерывными
производными. Полагаем, что для всех
линий, достаточно близких к линииy
=y(t),
функционалIтакже
определен. Построим кривуюy=y1(x)
=y(x)+y(x),
близкую к кривойy=y(x).
Пустьy1(x)
совпадает сy(x)
для всех значенийx,
лежащих вне малого интервала [x1,x2], содержащего
некоторую избранную абциссуc(x1<c<x2). При
построении кривыеy(x)
иy1(x)
определяют некоторый бугорок, возвышающийся
над кривойy(x).
Площадь такого бугорка равна:
— дважды дифференцирумая
функция своих аргументов, т. е. Fобладает непрерывными частными
производными до второго порядка
включительно по всем аргументам.y
=y(t)
— кривая, на которой функционалIпринимает определенное значение. Будем
полагать, чтоy =y(t)
обладает первой и второй непрерывными
производными. Полагаем, что для всех
линий, достаточно близких к линииy
=y(t),
функционалIтакже
определен. Построим кривуюy=y1(x)
=y(x)+y(x),
близкую к кривойy=y(x).
Пустьy1(x)
совпадает сy(x)
для всех значенийx,
лежащих вне малого интервала [x1,x2], содержащего
некоторую избранную абциссуc(x1<c<x2). При
построении кривыеy(x)
иy1(x)
определяют некоторый бугорок, возвышающийся
над кривойy(x).
Площадь такого бугорка равна:
Функциональной производной в точкеcбудем называть предел отношения приращения функционалаI(y1) –I(y) к площади, когда бугорок стягивается в точку.
Рассмотрим
y(x)
на функциональном пространстве всех дифференцируемых функций, обладающих
непрерывной производной, причем за
расстоянияr(y,y1) между функциямиy(x)
иy1(x)
примем их близость первого порядка:y=y(x)
= y1(x)
–y(x),yобладает непрерывной производной:
всех дифференцируемых функций, обладающих
непрерывной производной, причем за
расстоянияr(y,y1) между функциямиy(x)
иy1(x)
примем их близость первого порядка:y=y(x)
= y1(x)
–y(x),yобладает непрерывной производной:

Запишем вариацию функционала:
Из преобразования для вариации функционала:
и из требования, чтобы Iобращалось в нуль для произвольной функцииy, Лагранж вывел уравнение Эйлера:
Этому уравнению должна удовлетворять функция y=y(x), дающая экстремум интегралу:

Кривые удовлетворяющие уравнению Эйлера называют экстремалями.
5.2. Формализация задаЧи синтеза оптимальНого управления
Пусть движение объекта автоматического регулирования описывается, в общем случае нелинейным дифференциальным уравнением n-го порядка.
 (4.26)
(4.26)
где
 ;
; ;kn;u=u(t)—сигнал управления;x=x(t)—выходная (регулируемая)
величина;
;kn;u=u(t)—сигнал управления;x=x(t)—выходная (регулируемая)
величина; —возмущение;
—возмущение; ,
, —производные регулируемой
величины и возмущения;
—производные регулируемой
величины и возмущения; —
— —нелинейные функции,t—время. Рассматриваются нелинейные
аналитические функции, которые однозначно
определены при всех абсолютных значениях
аргумента в интервале [0,].
—нелинейные функции,t—время. Рассматриваются нелинейные
аналитические функции, которые однозначно
определены при всех абсолютных значениях
аргумента в интервале [0,].
Задача синтеза оптимального управления автоматическими системами: найти такой закон управления объектомОв виде функции регулируемой величины, задания и возмущения:
 (4.27)
(4.27)
где
 — задающее воздействие,r
— порядок производной задания; чтобы
мини-мизировать или максимизировать
интегральный критерий:
— задающее воздействие,r
— порядок производной задания; чтобы
мини-мизировать или максимизировать
интегральный критерий:
где F — заданная функция;r — порядок производной задания;T — рассматриваемый промежуток времени.
б
а
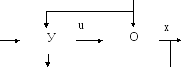

Рис. 4.1. Объект (а) и структура оптимального управления (б): У—управляющее устройство;О—объект регулирования
Задача поставлена как детерминированная, т. е. поведение системы в будущем целиком и полностью определяется ее состоянием в данный момент времени и величиной управления.
Построение оптимальных систем связано с решением родственных математических задач, которые делятся на два класса.
1. К первому относятся задачи, связанные с определением и расчетом самого режима невозмущенного воздействия. Ищется алгоритм автоматического управления, при котором данное невозмущаемое движение приобретает требуемые экстремальные свойства. Такие системы будем называть оптимальными по режиму управления.
2. В другом классе задач ищется регулятор, гарантирующий существование заданных свойств возмущенного движения (переходного процесса). Такие системы будем называть оптимальными по переходному процессу.
В обоих случаях задача оптимизации может быть трактована как двухточечная граничная задача, к решению которой применимы все методы вариационного исчисления.
В первом случае решение задачи получается в виде известных функций времени u = u(t). Это решение не очень удачно, ибо такое управление существенно зависит от начальных условий движения и не может скомпенсировать неизбежные изменения параметров объекта, так как является разомкнутым.
Во втором случае ищется закон регулирования в его аналитической форме, как некоторая функция исходных координат системы, т. е. задача состоит в конструировании дифференциального уравнения регулятора.
Помимо
отыскания оптимального управления
только как функции координат системы
или только функции времени, в некоторых
случаях целесообразно определять
оптимальное управление в функции
координат системы и времени:
 .
.
Одной из сложных задач, возникающих при синтезе оптимального управления, является учет ограничений величины управляющего воздействия (насыщение):
 (4.29)
(4.29)
и скорости его изменения:
 (4.30)
(4.30)
Ограничения (4.29) и (4.30) могут выполняться в отдельности и в определенных комбинациях.