

Оглавление
|
1. Цель работы ………………………………………………. 2. Теоретическая часть ……………………………………... 2.1. Определение центра тяжести небольших звеньев, имеющих ось симметрии ……………… 2.2. Определение центра тяжести крупных звеньев, имеющих ось симметрии ……………… 2.3. Определение центра тяжести звеньев, не имеющих оси симметрии ……………………. 3. Приборы и принадлежности для работы ……………….. 4. Описание приборов ………………………………………. 5. Порядок выполнения работы ……………………………. 6. Оформление работы............................................................ Приложение ............................................................................ Список рекомендуемой литературы ..…………………...…
|
4 4
6
7
7 9 9 10 11 13 16 |
Лабораторная работа
“ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ЗВЕНЬЕВ
МЕХАНИЗМОВ МЕТОДОМ ФИЗИЧЕСКОГО МАЯТНИКА”
1. Цель работы
Ознакомление с определением моментов инерции звеньев механизмов с помощью метода физического маятника.
2. Теоретическая часть
Физическим маятником называется твердое тело произвольной формы, подвешенное на горизонтальной неподвижной оси. Таким физическим маятником может быть, например, шатун 1, установленный проушиной на ребро неподвижной призмы2(рис. 1).
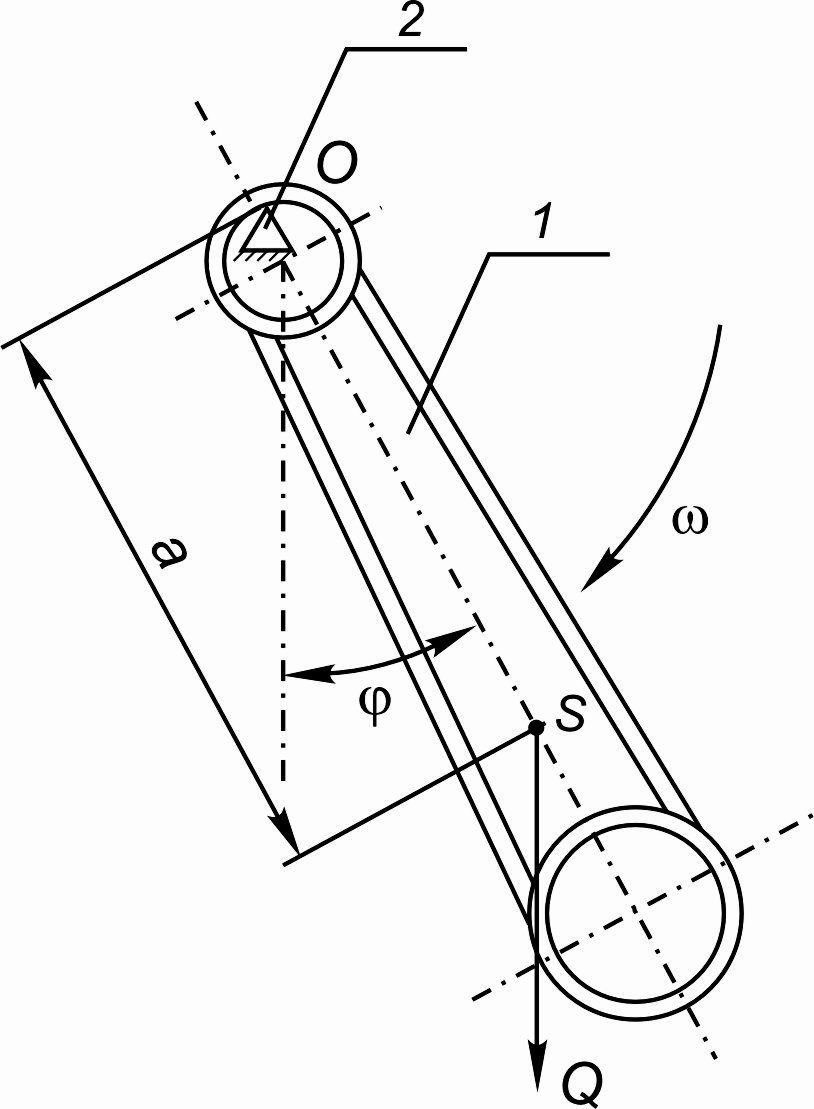
Рис. 1. Физический маятник
Если шатун отклонить от вертикального
положения и затем отпустить, то он начнет
совершать колебания в плоскости,
перпендикулярной ребру призмы, вокруг
точки
![]() .
Между периодом колебаний и моментом
инерции шатуна относительно его оси
под действием силы тяжести существует
определенная зависимость:
.
Между периодом колебаний и моментом
инерции шатуна относительно его оси
под действием силы тяжести существует
определенная зависимость:
 ,
(1)
,
(1)
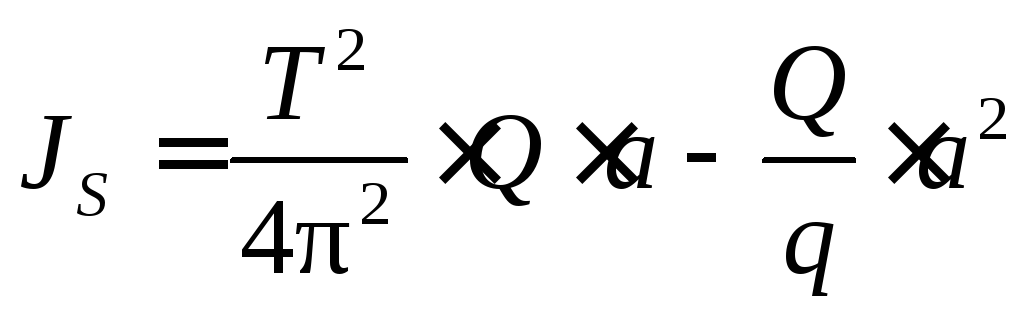
где
![]() момент
инерции шатуна относительно центра
тяжести,
момент
инерции шатуна относительно центра
тяжести,![]() ;
;![]() сила
тяжести шатуна,
сила
тяжести шатуна,![]() ;
;![]() расстояние
от центра тяжести шатуна до оси подвеса,
расстояние
от центра тяжести шатуна до оси подвеса,![]() ;
;![]() период
колебаний,
период
колебаний,![]() ;
;
 ,
(2)
,
(2)
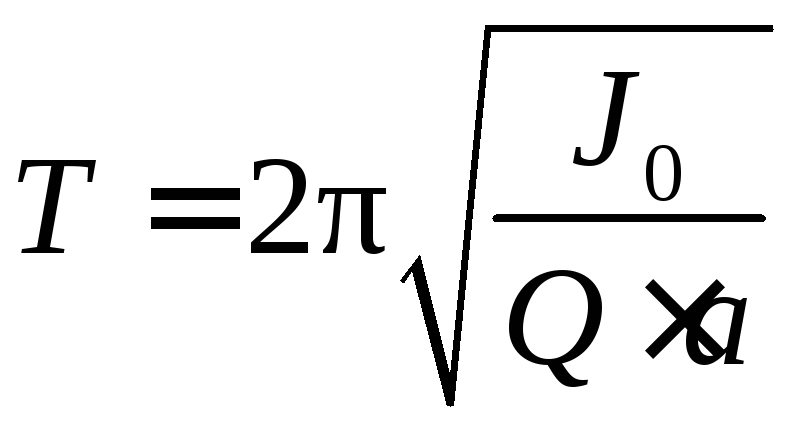
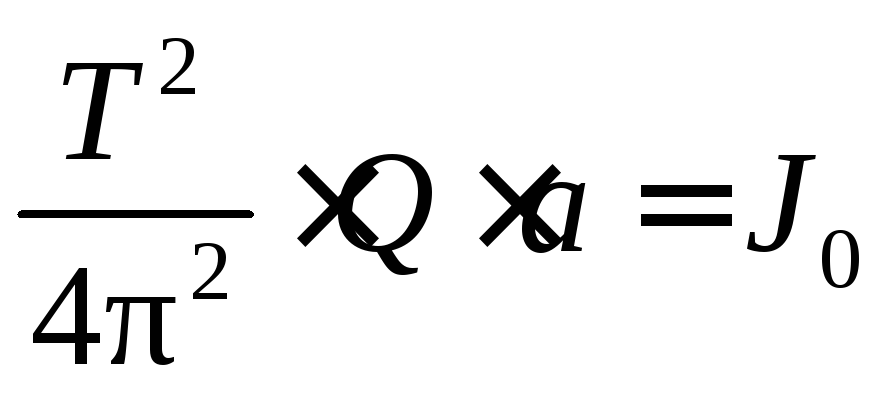
где
![]() момент
инерции шатуна относительно оси подвеса,
момент
инерции шатуна относительно оси подвеса,![]() .
.
Установлено, что наименьшая ошибка при
определении моментов инерции звеньев
методом физического маятника получается
при амплитуде колебания до
![]() .
Кроме того, этот метод можно применять
для звеньев, которые удобно подвешиваются
на ребро трехгранной призмы (шатуны,
кривошипы и другие рычажные звенья,
имеющие проушины).
.
Кроме того, этот метод можно применять
для звеньев, которые удобно подвешиваются
на ребро трехгранной призмы (шатуны,
кривошипы и другие рычажные звенья,
имеющие проушины).
Вычисление ошибки
![]() при определении момента инерции можно
выполнить, если принять в формуле (1)
при определении момента инерции можно
выполнить, если принять в формуле (1)
 и
и![]() .
.
Тогда
![]() .
(3)
.
(3)
 .
(4)
.
(4)
 .
(5)
.
(5)
 .
(6)
.
(6)
Сначала по формуле (6) определяются
относительные ошибки
![]() и
и![]() ,
затем по формулам (5) – относительные
ошибки
,
затем по формулам (5) – относительные
ошибки![]() и
и![]() и, наконец, по формулам (4) подсчитываются
относительные и абсолютные ошибки
величины
и, наконец, по формулам (4) подсчитываются
относительные и абсолютные ошибки
величины![]() .
.
При определении момента инерции необходимо определить также силу тяжести звена и положение его центра тяжести. Сила тяжести звена определяется взвешиванием, положение центра тяжести – в зависимости от величины и формы звена – одним из изложенных ниже способов.
2.1. Определение центра тяжести небольших
звеньев, имеющих ось симметрии
Звено 1кладут на ребро трехгранной
призмы таким образом, чтобы оно находилось
в равновесии (см. рис. 2). На звене отмечают
точки «![]() »
и «
»
и «![]() »,
лежащие против ребра призмы. Затем эти
точки соединяют прямой линией. Пересечение
этой линии с осью симметрии
»,
лежащие против ребра призмы. Затем эти
точки соединяют прямой линией. Пересечение
этой линии с осью симметрии![]() определит положение центра тяжести
определит положение центра тяжести![]() .
.
Рис. 2. Определение центра тяжести звеньев, имеющих ось симметрии
Расстояние «![]() »
от центра тяжести до точки подвеса
определяют с помощью масштабной линейки.
»
от центра тяжести до точки подвеса
определяют с помощью масштабной линейки.
2.2. Определение центра тяжести крупных
звеньев, имеющих ось симметрии
Звено 1(см. рис. 3) подвешивают на
нити2, привязанной к его концам. В
точке подвеса прикрепляют отвес3.
Точка пересечения нити отвеса с осью
симметрии звена![]() и определит центр тяжести звена.
и определит центр тяжести звена.
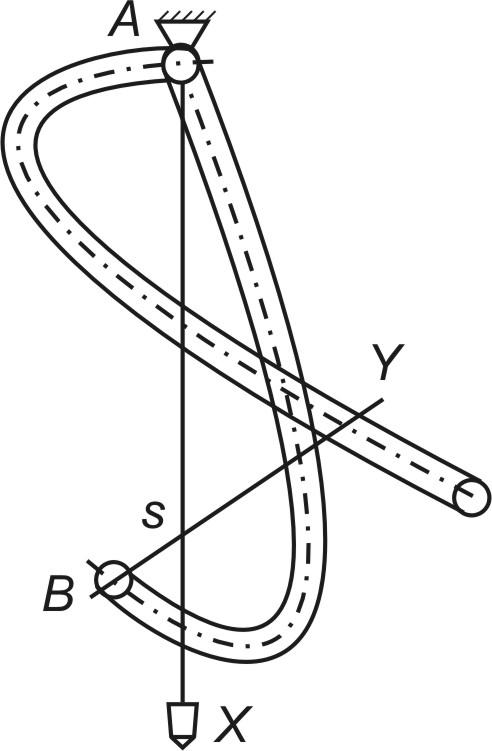
2.3. Определение центра тяжести звеньев,
не имеющих оси симметрии
Определение положения центра тяжести
производится при помощи последовательного
подвешивания звена на двух точках (рис.
4). При каждом подвешивании с помощью
отвеса отмечают линии
![]() и
и![]() .
Точка
.
Точка![]() пересечения линий
пересечения линий![]() и
и![]() будет
искомым центром тяжести.
будет
искомым центром тяжести.
|
|
Рис. 3. Определение центра тяжести больших звеньев, имеющих ось симметрии
|
|
|
Рис. 4. Определение центра тяжести звеньев, не имеющих оси симметрии |
3. ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ ДЛЯ РАБОТЫ
1) приборы ТММ25 и ТММ25а; 2) секундомер однострелочный типа СМ-60; 3) металлическая масштабная линейка; 4) весы; 5) шнур с отвесом; 6) звено (шатун, кривошип, рычаг), для которого определяется момент инерции.
4. ОПИСАНИЕ ПРИБОРОВ
|
|
|
|
Рис. 5. Схема прибора ТММ25 1 – призма, 2 – стойка, 3 – штатив, 4 – установочный винт, 5 – клиновидная планка, 6 – уровень |
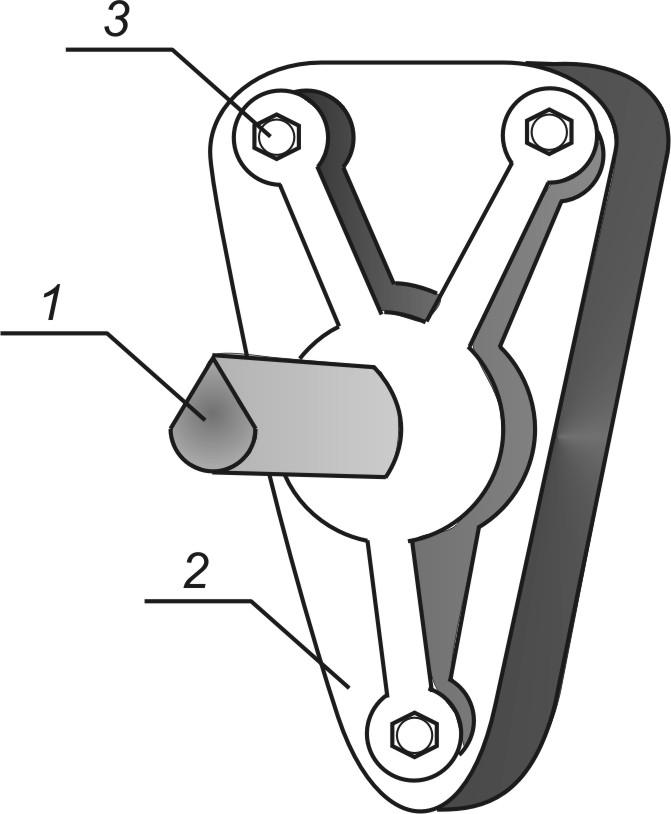
Рис. 6. Схема прибора ТММ25а 1 – призма, 2 – кронштейн, 3 – болт
|
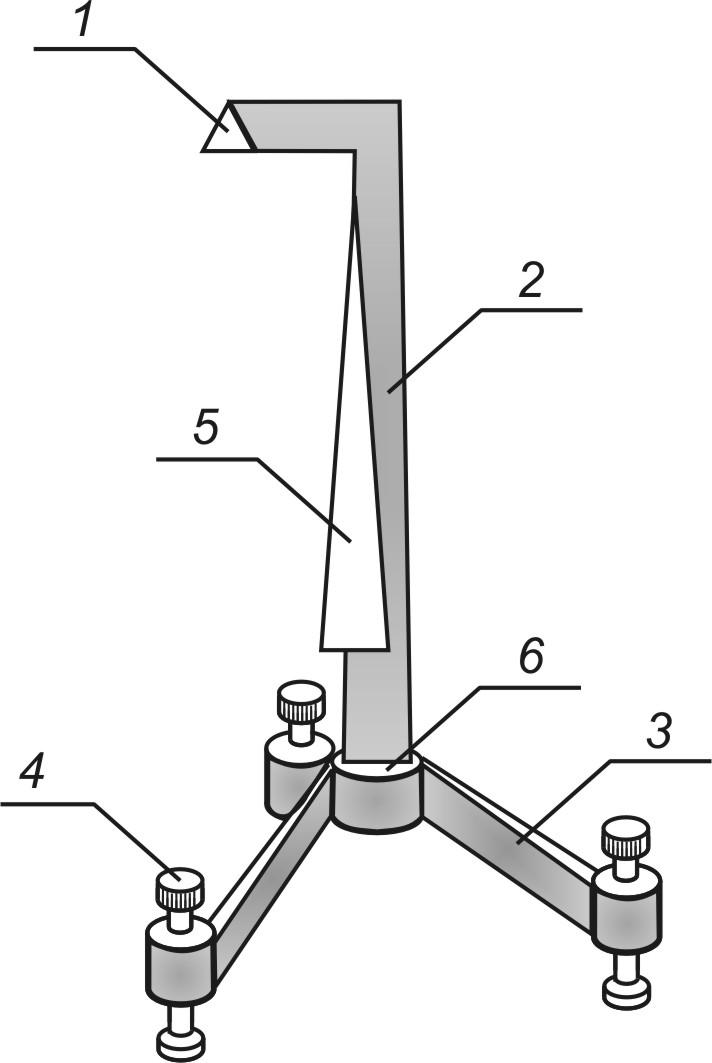
Основной частью прибора ТММ25 (рис. 5) является закаленная и отшлифованная стальная призма 1, закрепленная на стойке2таким образом, чтобы рабочее ребро было обращено вверх. Стойка2установлена на штативе3, снабженном двумя установочными винтами4и круглым уровнем6для приведения рабочего ребра призмы в горизонтальное положение. Под призмой на стойке2закреплена клиновидная планка5, которая служит указателем максимально допустимых амплитуд качания звена.
Прибор ТММ25а (см. рис. 6) состоит из кронштейна 2, наглухо закрепленного на стене анкерными болтами3. Призма1заделана в кронштейне2.