

3.2 Классификация систем автоматического управления.
По принципу действия системы управления подразделяются на замкнутые, разомкнутые и комбинированные.
1) Замкнутые. В данных СУ в обязательном порядке контролируются выходные величины, но при этом не учитываются внешние возмущающие воздействия.
Ранее данные СУ классифицировались как системы по отклонению, т.к. в обязательном порядке контролировалось отклонение выходной величины.
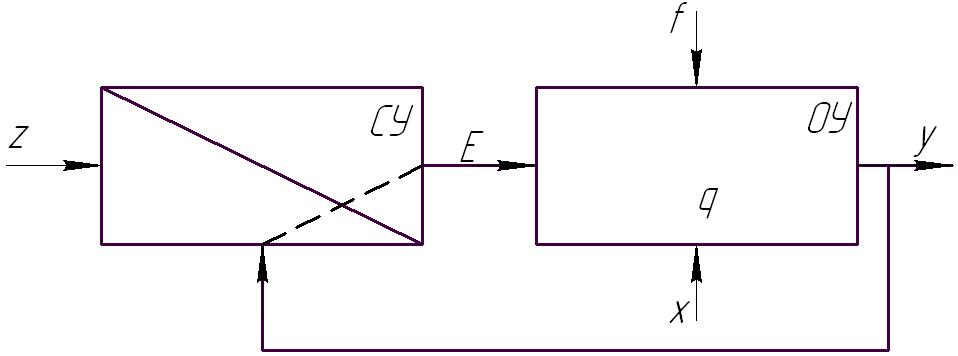
Рисунок 26
2) Разомкнутые. В этих СУ совершенно не контролируются выходные величины, а внешние возмущающие воздействия ликвидируются, регулируются или стабилизируются до поступления на объект управления.
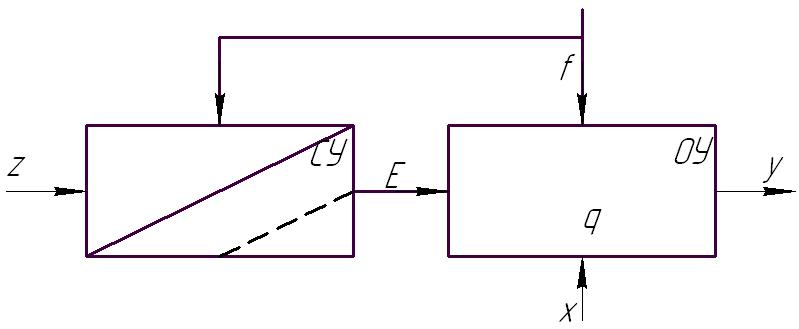
Рисунок 27
Ранее данные системы классифицировались как системы по возмущению, т.к. система управления осуществляла регулирующее воздействие по значениям внешних возмущающих воздействий.
3) Комбинированные. Они объединяют в себе достоинства замкнутых и разомкнутых систем.
3.3 Состав структурных схем автоматического управления.
Основными элементами структурных схем являются узлы суммирования, узлы разветвления и динамические звенья.
1) Узел суммирования: 2) Узел разветвления: 3) Динамическое звено:

Рисунок 28
В узле разветвления входная величина без изменения разветвляется по нескольким направлениям.
Динамическое звено- это устройство, в котором происходит количественное и качественное изменение входной величины. W(p)- передаточная функция звена (или всей системы в целом)- отношение лапласовых изображений выходной или входной величины. Прямым преобразованием Лапласа функции действительной переменнойf(t) называется функция комплексного переменногоF(p) которая записывается выражением:
![]() ,
,
где L- символ преобразования Лапласа;
f(t)- оригинал;
F(t)- изображение;
![]() .
.
Для практических расчетов данная формула используется в следующем виде:
y(p)=x(p)W(p).
3.4 Определение передаточной функции су при различных соединениях динамических звеньев.
Последовательное- соединение, при котором входной величиной каждого последующего звена является выходная величина каждого предыдущего звена.
![]()
Рисунок 29
y1(p)=x(p)W1(p);y2(p)=x(p)W1(p)W2(p);y3(p)=x(p)W1(p)W2(p)W3(p);WC(p)=![]()
Параллельное– соединение, при котором на входе находится узел разветвления, а на выходе узел суммирования.
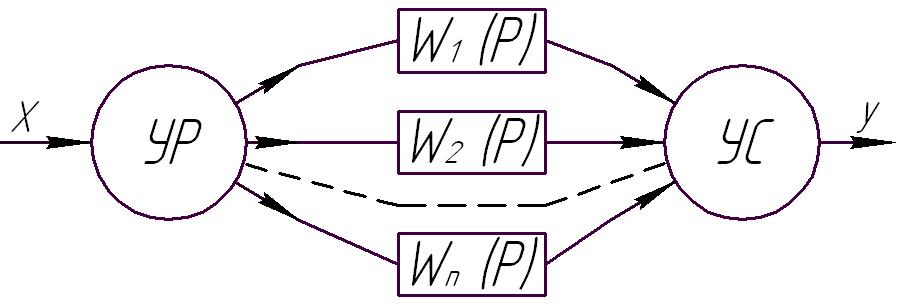
Рисунок 30
y1(p)=x(p)W1(p);y2(p)=x(p)W2(p);yn(p)=x(p)Wn(p);WC(p)=![]()
3.5 Соединения с замкнутой обратной связью
Соединение при котором входной величиной всей системы является входная величина 1-го звена, а выходной величиной всей системы является выходная величина k-го звена называется соединением с замкнутой обратной связью.
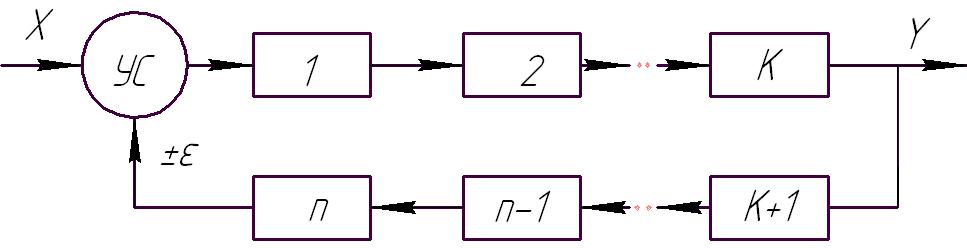
Рисунок 31
Звенья c1 поk- линия прямого преобразования, звенья сk+1 по n - линия обратного преобразования.
Если выходная величина n-го звена имеет знак «+», то обратная связь называется жёсткой положительной, если знак «-», то жёсткой отрицательной. Если выходная величина может принимать как «+» так и «-» значения, то обратная связь называется гибкой.
Обозначим через
![]() - передаточную функцию линии прямого
преобразования
- передаточную функцию линии прямого
преобразования![]() - передаточную функцию линии обратного
преобразования, тогда передаточная
функция всей системы определяется
выражением:
- передаточную функцию линии обратного
преобразования, тогда передаточная
функция всей системы определяется
выражением:
![]()
В данной формуле в знаменателе знак «+» используется для отрицательной обратной связи и «-» для положительной.