

Сведение недетерминированного автомата к детерминированному
Недетерминированность автомата локально проявляется в том, что из екоторого его состояния qi исходит несколько дуг, помеченных одним и тем же символом хj, как показано на рис.2.
xr
qi
ql
qk
xj
xp
xj
xs
Рис. 2. Пример устранения недетерминированности
В этом случае недетерминированность устраняется склеиванием двух состояний ql и qk в одно – ql,k . При этом ql,k инцидентны все исходящие дуги xs, xp, xr, являющиеся исходящими дугами вершин ql и qk .
xs
В результате применения алгоритма нахождения детерминированного автомата, от автомата рис. 1 можно перейти к эквивалентному детерминированному автомату, таблица переходов которого приведена в табл. 5, а соответствующий ей граф переходов – на рис. 4.
Таблица 5.
|
q |
x0 |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
x7 |
|
q0 |
q1,3 |
|
|
q7 |
|
|
|
q10 |
|
q1,3 |
|
q2 |
|
|
|
|
|
q4 |
|
q2 |
|
|
|
|
q5 |
|
|
|
|
q4 |
|
|
|
|
|
q6 |
|
|
|
q5 |
|
|
q19 |
|
|
q8 |
|
|
|
q6 |
|
|
q19 |
|
|
q9 |
|
|
|
q7 |
|
|
q19 |
|
|
q9 |
q11,17 |
q14 |
|
q8 |
q0 |
q19 |
|
|
|
|
|
|
|
q9 |
q0 |
q19 |
|
|
|
|
|
|
|
q10 |
q14 |
|
|
|
|
q17 |
q11 |
|
|
q11 |
|
|
|
q12 |
|
|
|
|
|
q12 |
|
|
|
q13 |
|
|
|
|
|
q13 |
|
|
|
q19 |
|
|
|
|
|
q14 |
|
|
|
q15 |
|
|
|
|
|
q15 |
|
|
|
q16 |
|
|
|
|
|
q16 |
|
|
|
q19 |
|
|
|
|
|
q17 |
|
|
|
q18 |
|
|
|
|
|
q18 |
|
|
|
q19 |
|
|
|
|
|
q19 |
|
|
|
|
|
|
|
|
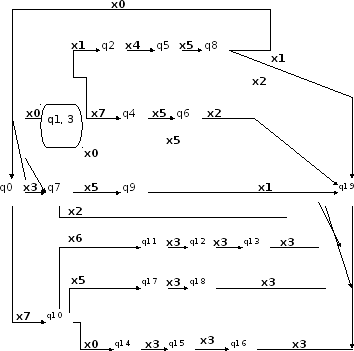
Рис. 4: Граф переходов детерминированного автомата, эквивалентного исходному.
Минимизация автомата
Построение минимального (по числу состояний) автомата, эквивалентного полученному полностью определенному детерминированному конечному автомату, осуществляется в два этапа. На первом находится разбиение на классы эквивалентности, а на втором строится минимальный автомат.
Вначале составляется треугольная таблица (табл. 6), клетки которой соответствуют всем парам (qi, qj), i≠j рабочих состояний. Она заполняется следующим образом. Если для рабочих состояний qi и qj в табл. 5 существует входной символ xk, при котором переход из qi осуществляется в одно из рабочих состояний, а из qj – в состояние ОШИБКА, то состояния qi и qj не эквивалентны, и соответствующая им клетка помечается крестом. Иначе, если какие-либо две строчки табл. 5 содержат разное число рабочих состояний или отличаются позициями, то обозначающие эти строки состояния не эквивалентны. В противном случае в клетку табл. 6 с координатами qi, qj запишем каждую пару состояний (qv, qw), v≠w, в которые автомат может перейти из qi и qj при подаче одного и того же входного символа.
Таблица 6.
q12; q15
q12; q13
|
1,3 |
X |
|
q8 ,q9; q19
q8 ,q9; q19
|
|
|
q12; q16
q12; q18
q12; q19
q13; q15
|
| |||||||||||||||
|
2 |
X |
X | ||||||||||||||||||||
|
4 |
X |
X |
X |
| ||||||||||||||||||
|
5 |
X |
X |
X |
X |
q13; q19
q13; q16
q13; q18
q19; q15
| |||||||||||||||||
|
6 |
X |
X |
X |
X |
|
| ||||||||||||||||
|
7 |
X |
X |
X |
X |
|
| ||||||||||||||||
|
8 |
X |
X |
X |
X |
X |
X |
X | |||||||||||||||
|
9 |
X |
X |
X |
X |
X |
X |
X |
|
q19; q16
| |||||||||||||
|
10 |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
|
q19; q18
| ||||||||||
|
11 |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
q15; q16
q15; q18
q15; q19
| |||||||||||
|
12 |
X |
X |
X |
X |
X |
X |
Х |
X |
X |
X |
| |||||||||||
|
13 |
X |
X |
X |
X |
Х |
Х |
X |
X |
X |
X |
|
|
q16; q19
| |||||||||
|
14 |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
|
|
q16;q18
|
q19; q18
q18; q18
|
| ||||||
|
15 |
X |
X |
X |
X |
X |
X |
Х |
X |
X |
X |
|
|
|
|
| |||||||
|
16 |
X |
X |
X |
X |
Х |
Х |
X |
X |
X |
X |
|
|
|
|
| |||||||
|
17 |
X |
X |
X |
X |
Х |
Х |
X |
X |
X |
X |
|
|
|
|
|
| ||||||
|
18 |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
|
|
| ||||
|
19 |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
X |
Х | ||||
|
|
0 |
1,3 |
2 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 | ||||
Не вычеркнутые клетки результирующей таблицы соответствуют всем парам эквивалентных состояний. Класс эквивалентности образуется состояниями, которые попарно эквивалентны. В данном случае получаем 6 пар, попарно эквивалентных состояний: q5 и q6, q8 и q9, q12 и q15, q13 и q16, q13 и q18, q16 и q18. Эти состояния образуют четыре классов эквивалентности {q5, q6}; {q8, q9};{q12, q15 };{q13, q16, q18} . Каждое состояние, не вошедшие ни в один класс эквивалентности, эквивалентно лишь само себе и само образует этот класс. В моем примере к перечисленным пяти классам необходимо добавить еще шесть классов эквивалентности: q1,3; q2; q4; q10; q19; q0.
Состояния минимального автомата обозначим буквами “r” с индексами:
r0 = {q5, q6, q7}, r1 = { q8, q9}, r2 = {q12, q15, q17}, r3 = {q13, q16, q18}, r4 = {q1,3}, r5 = {q2}, r6 = {q4}, r7 = {q10}, r8 = {q11}, r9 = {q14}, r10 = {q19}, r11 = {q0};
Граф переходов этого автомата приведен ни рис.5, а таблица переходов – в табл. 7.

Рис. 5 Граф переходов минимального распознающего автомата
Таблица 7.
|
r |
x0 |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
x7 |
|
r0 |
|
|
r10 |
|
|
r1 |
|
|
|
r1 |
r11 |
r10 |
|
|
|
|
|
|
|
r2 |
|
|
|
r3 |
|
|
|
|
|
r3 |
|
|
|
r10 |
|
|
|
|
|
r4 |
|
r5 |
|
|
|
|
|
r6 |
|
r5 |
|
|
|
|
r0 |
|
|
|
|
r6 |
|
|
|
|
|
r0 |
|
|
|
r7 |
r9 |
|
|
|
|
r2 |
r8 |
|
|
r8 |
|
|
|
r2 |
|
|
|
|
|
r9 |
|
|
|
r2 |
|
|
|
|
|
r10 |
|
|
|
|
|
|
|
|
|
r11 |
r4 |
|
|
r0 |
|
|
|
r7 |