

5.2. Схема и назначение выводов
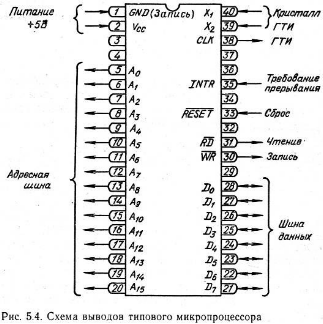
Микропроцессор заключен в DIP-корпус с 40 двухрядными выводами. Эта ИС питается
напряжением +5 В по выводам 1 и 2. ВыводыХ1 иХ2 вверху справа предназначены для подсоединения
кристалла управления частотой ГТИ МП. Для наиболее распространенных устройств характерно наличие
ГТИ на кристалле МП, тогда как для более старых устройств был необходим внешний ГТИ. Выход CLK
(вывод 38) предназначен для выдачи сигналов ГТИ в систему. Частота сигнала на выводе38 (CLK),
очевидно, подчинена частоте внутреннего ГТИ.
Адресная шина системы будет подсоединена к выводам ИС Ао—Ахь (рис. 3.4). Эти 16 адресных
линий (может быть и другое количество) могут обеспечить доступ к 65 536 (216) ячейкам памяти или/и
портам ВВ.
Поток данных и команд от микропроцессора и в него обеспечивается выводами Do—D7 на ИС рис.
5.4. Эти выводы (21—28) двунаправленные, т. е. являются то выходами, то входами. Кроме того, обычно
они могут переводиться в третье состояние (высокого сопротивления).
Вывод 30 является выходом управления записью. Сигнал L-уровня на выходеWR указывает, что
данные, имеющиеся на шине данных, должны быть записаны в область памяти или выбранное УВВ. Выход
управления считыванием RD (вывод31) активизируется L-сигналом, который указывает, что избранные
места в памяти или УВВ должны быть считаны.
Результатом активизации входа сброса является остановка работы МП по текущей программе и
переход к подпрограмме сброса. Сигнал L-уровня на входе RESETМП сбрасывает счетчик команд до
заранее предопределенного адреса, например 0000Н. Другие внутренние регистры МП могут быть также
сброшены или их содержимое изменяется в течение операции сброса. Когда вход RESET переходит в
состояние HIGH, МП начинает выполнение команд с нового адреса памяти, т. е. с адреса 0000Н в данном
случае (или с другого заранее предопределенного адреса памяти).
Этот адрес соответствует началу подпрограммы новой инициализации системы, содержащейся
обычно в ПЗУ.
Большинство микропроцессоров находятся в фазе с ГТИ, следовательно, они являются
синхронными. Вход RESET МП асинхронный и может вмешаться и приостановить наполовину
выполненную команду.
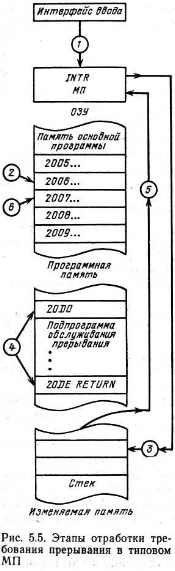
Вход требования прерывания помещен на вывод 35. ВходWTR отвечает на Н-сигнал внешнего
устройства. Предположим, что устройство интерфейса ввода на рис. 3.5 загружено 8 бит параллельных
данных, готовых для передачи в МП: процесс может быть продолжен в порядке, показанном на рис. 5.5.
1. Интерфейс ввода выдает сигнал требования прерывания в направлении МП.
2. Микропроцессор завершает выполнение текущей команды, находящейся в памяти по
адресу 2006Н.
3. Поскольку управление должно обеспечить последующее обращение к команде по адресу
2007Н, содержимое счетчика команд (именно 2007Н) и содержимое большинства регистров
МП помещается в специальную зону ОЗУ, называемую стеком. Это содержимое будет позже извле-
чено в определенном порядке в регистры МП и в счетчик команд.
4. МП разветвляется в предопределенный адрес памяти и начинает выполнение подпрограммы
обслуживания прерывания (в нашем примере 20DOH). Микропроцессор выполняет тогда команды
подпрограммы, которые всегда в нашем примере обеспечивают выполнение операций ввода. По адресу
20DEH МП находит конец этой подпрограммы обслуживания и получает приказ вернуться в основную
программу.
5. Перед возвращением в основную программу данные регистров и счетчик команд, помещенные в
стек, возвращаются в МП.
6. Теперь счетчик команд отсылает МП в память по адресу 2007Н, т. е. в основную программу, и
нормальное выполнение ее продолжается.
Прерывание является очень полезным способом, позволяющим периферии вмешаться и заставить
МП выполнять требуемую операцию почти сразу. Многие микропроцессоры обладают одним или
несколькими прерываниями. Входы прерывания могут быть названы также сбросами, новым запуском,
маскируемыми прерываниями или сетками.