

5 Обробка результатів
5.1 За результатами вимірювання реостатного датчика побудувати залежність IН = F1(α) при RН = 8 Ом і IН = F1'(α) при RН = 3 кОм.
5.2 Дослідні дані перевірити теоеретичним розрахунком за формулою (1), приймаючи UП = 5 В, RД = 470 Ом. Опір RХ (рис.1) розрахувати за значеннями кутів повороту движка D потенціометра RД із співвідношення
де αI і αMAX – значення кутів повороту з таблиці 1.
5.3 Для кожного вимірювання (αІ) визначити:
IН' – розрахунковий струм навантаження;
ΔI = IН' – IН – абсолютну похибку;
 –відносну
похибку.
–відносну
похибку.
Результати розрахунку занести до таблиць 1 і 2.
5.4 За результатами вимірювання індуктивного датчика побудувати залежність IН = F2(δ). При мінімальному (δ = 0) і максимальному (δ = 50 мм) значеннях переміщення осердя визначити величину індуктивності котушки LК датчика з формули (2), приймаючи UП = 12 В, f = 50 Гц, RЦ = 500 Ом, IН – із досліду. Скласти і записати розрахункову формулу.
5.5 За результатами вимірювання ємнісного датчика побудувати залежність IН = F3(α). Користуючись залежністю IН = k∙UГ∙2πfC, де UГ = 5 В – напруга генератора, k = 5 – коефіцієнт підсилення підсилювача, f = 25 кГц, IН – із досліду, визначити мінімальне (α = 0) і максимальне (α = 180о) значення ємності конденсатора датчика.
5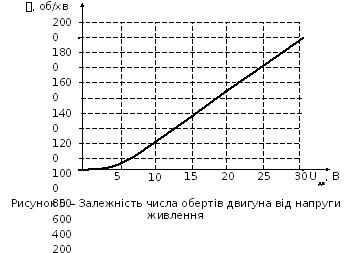 .6
За даними таблиці 5 і за допомогою графіка
(рис.5) визначити число обертів Ω
тахогенераторного датчика і занести
значення Ω у таблицю. За даними таблиці
побудувати залежність IН
= F4(Ω).
.6
За даними таблиці 5 і за допомогою графіка
(рис.5) визначити число обертів Ω
тахогенераторного датчика і занести
значення Ω у таблицю. За даними таблиці
побудувати залежність IН
= F4(Ω).
6 Зміст звіту
6.1 Назва, мета роботи і короткі теоретичні відомості.
6.2 Схеми дослідження реостатного, ємнісного, індуктивного і тахогенераторного датчиків.
6.3 Таблиці, результати розрахунків і розрахункові співвідношення відповідно до пунктів завдання.
6.4 Графічні залежності за результатами дослідження датчиків.
7 Контрольні запитання
7.1 Дайте визначення датчика.
7.2 Зазначте призначення датчиків.
7.3 Наведіть класифікацію датчиків за родом вхідної величини x(t).
7.4 Дайте визначення параметричних і генераторних датчиків.
7.5 Зазначте особливості дії вимірювальних і контрольних датчиків, датчиків із безпосереднім і з проміжним перетворенням.
7.6 Поясніть схему, принцип дії і наведіть основні співвідношення для датчиків, досліджуваних у лабораторній роботі:
а) реостатного;
б) індуктивного;
в) ємнісного;
г) тахогенераторного.
7.7 Поясніть, чому для ємнісних датчиків використовуються струми підвищених частот.
7.8 Наведіть вигляд функціональної залежності y(t) = F{x(t)} для реостатного, індуктивного, ємнісного і тахогенераторного датчиків.
Лабораторна робота № 2 Побудова динамічних характеристик електромагнітних реле
Мета роботи. Вивчити способи побудови механічних і тягових характеристик електромагнітних реле.
1 Короткі теоретичні відомості
При вмиканні електромагнитного реле (рис.1) на якір діє сила тяги електромагніта FЕ, від якої він переміщується, розмикаючи тилові контакти і замикаючи фронтові. При цьому переміщенні сила тяги переборює сили опору: вагу якоря і противаги Q, сили тертя, реакцію контактних пружин. Наприкінці ходу якоря на контактних пружинах створюється заданий контактний тиск РК. Отже, під час притягання якір переборює мінливі за величиною механічні зусилля.
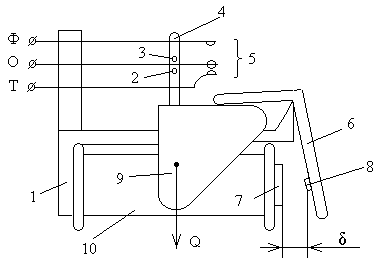
Рисунок 1 – Конструкція нейтрального реле
Залежність механічних зусиль, що переборюються при переміщенні якоря, від величини повітряного зазору, називається механічною характеристикою реле FМ = f(δ), де δ – повітряний зазор між якорем і осердям реле. Різноманітні типи реле відрізняються один від одного конструкцією магнітопроводу, кількістю контактних груп, пружністю контактних пружин, характером руху якоря, але методи побудови їх механічних характеристик однакові. Розглянемо принцип побудови механічної характеристики на прикладі конструкції реле НМШ.
У вихідному положенні, коли реле знеструмлено (рис.1) і якір 6 опущений, під дією сили ваги Q якоря з вантажем верхній штифт 3 контактної тяги 4, пов'язаної з якорем, тисне на пружину О і згинає її. Пружина О торкається пружини Т, тисне на неї і частково згинає. При цьому створюється необхідний контактний тиск РКТ між загальним і тиловим контактами (О і Т). Нескомпенсовану частину ваги якоря і вантажу Q' сприймає ярмо 1.
Отже, для руху якоря до нього необхідно спочатку прикласти силу, рівну частині ваги якоря Q', що залишилася. Початку руху якоря відповідає точка а на рис.2.
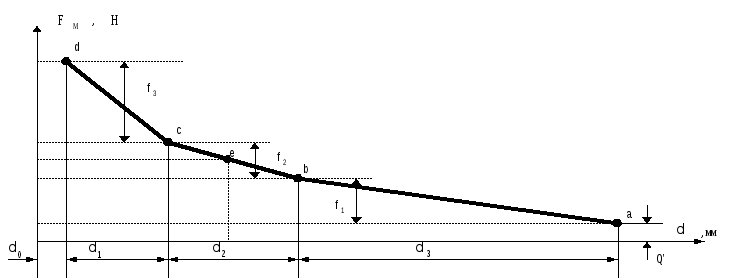
Рисунок 2 – Механічна характеристика нейтрального реле
Точці а механічної характеристики відповідає максимальний повітряний зазор δ = δmax. Ділянка аb характеристики відповідає першому етапові руху якоря, коли розпрямляються пружини О і Т, рухаючись спільно. У точці b відбувається розмикання тилового контакту. Отже, сила f1 являє собою контактний тиск РКТ на тиловий контакт. Ділянку bс можна розділити на дві частини: bе – пружина О розгинається; ес – пружина О згинається під тиском на неї знизу штифта 2 контактної тяги. У точці e пружина О не зігнута, і на якір не діють сили реакції контактних пружин. Тому в точці е механічні зусилля опору визначаються головним чином вагою якоря з вантажем Q.
Кут нахилу характеристики на ділянці bс визначається коефіцієнтом пружності пружини О. У точці с пружина О торкається верхньої пружини Ф, при цьому замикається фронтовий контакт. Ділянка сd відповідає сумісному вигину пружин О і Ф до створення між ними заданого контактного тиску РКФ. Тому РКФ = f3. У точці d повітряний зазор мінімальний δ = δmin і визначається висотою δ0 антимагнітного штифта 8. Цей штифт призначений для того, щоб виключити залипання якоря під дією залишкового магнітного потоку осердя (намагнічування осердя).
Механічна характеристика необхідна для розрахунку параметрів електромагніта реле. Тягове зусилля FЕ, що розвивається електромагнітом, повинно бути більше сили FМ, що перешкоджає притяганню якоря, при всіх значеннях повітряного зазора. Тому умова спрацьовування реле FЕ > FМ, при δ0 ≤ δ ≤ δmax.
Другою основною характеристикою реле є тягова або електромеханічна характеристика. Тяговою характеристикою реле називається залежність сили притягання якоря, утворюваної електромагнітом, від значення повітряного зазора при постійній магніторушійній силі: FЕ = φ(δ) при ІW = const.
Тягову характеристику реле значно легше будувати за допомогою сімейства навантажувальних характеристик. Навантажувальна характеристика являє собою залежність сили притягання якоря реле від магніторушійної сили при постійному (визначеному) повітряному зазорі: F'Е= ψ(IW) при δ =const.
Звичайно будується не менше трьох навантажувальних характеристик для різних значень повітряного зазору (рис.3). По навантажувальних характеристиках графічно будуються тягові характеристики. Для вибору оптимальної тягової характеристики з урахуванням умови FЕ > FМ, вони графічно сполучаються з механічними. Для надійної роботи реле необхідно, щоб FЕ = (1,2 – 4,0)FМ. Надмірне збільшення сили притягання якоря викликає значні удари якоря по


осердю, вібрацію контактів і розклепування антимагнітного штифта, а також призводить до втрат енергії на нагрівання реле.