

М-3 триф подвес (Восстановлен)
.docЛабораторная работа № M-3
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ГРУЗА
МЕТОДОМ ТРИФИЛЯРНОГО ПОДВЕСА
1 Цель работы
Целью работы является изучение кинематических характеристик вращательного движения, определение момента инерции J груза.
2 Оборудование и принадлежности
Трифилярный подвес, секундомер, образцы для определения момента инерции.
3 Теоретическая часть
3.1 Основные определения кинематики вращательного движения
Элементарные
углы поворота рассматривают как векторы.
Модуль вектора
![]() равен
углу поворота, а его направление
подчиняется правилу
правого винта (рисунок
1).
Векторы,
направления которых связываются с
направлением вращения, называются
псевдовекторами
или
аксиальными
векторами.
равен
углу поворота, а его направление
подчиняется правилу
правого винта (рисунок
1).
Векторы,
направления которых связываются с
направлением вращения, называются
псевдовекторами
или
аксиальными
векторами.
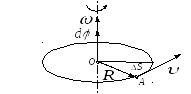
Рисунок 1 – Угловая скорость
Угловой
скоростью
![]() называется
векторная величина, равная первой
производной угла поворота тела по
времени:
называется
векторная величина, равная первой
производной угла поворота тела по
времени:
![]() .
.
При
повороте на угол
точка А,
движущаяся по окружности радиусом R
,
пройдет путь S,
равный длине дуги окружности. При этом
![]() .
.
Линейная
скорость этой точки
![]() ,
,
![]() или
в векторном виде
или
в векторном виде
![]() (1)
(1)
Если =const, то вращение равномерное и его можно характеризовать периодом вращения.
Период вращения Т – время, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2. Так как промежутку времени t=T соответствует =2, то = 2/Т, откуда
![]()
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения n:
![]() ,
,
![]()
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
![]() (2)
(2)
При вращении тела вокруг неподвижной оси вектор углового ускорения направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор сонаправлен вектору , при замедленном – противонаправлен ему.
Линейное ускорение a материальной точки, движущейся по криволинейной траектории, можно разложить на две составляющие: тангенциальную a и нормальную an (рисунок 2).
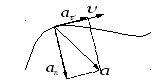
Рисунок 2 – Нормальная и тангенциальная составляющие ускорения
Тангенциальная
составляющая ускорения характеризует
быстроту
изменения скорости по модулю (направлена
по касательной к траектории) и равна
![]() .
.
Нормальная
составляющая ускорения
характеризует быстроту изменения
скорости по направлению (направлена
к центру кривизны траектории) и равна
![]()
Тогда
с учетом (1) и (2)
![]() и
и
![]()
Таким образом, связь между линейными (длина пути S, пройденного точкой по дуге окружности радиуса R, линейная скорость , тангенциальное ускорение а, нормальное ускорение аn ) и угловыми величинами (угол поворота , угловая скорость ω, угловое ускорение ) выражается следующими формулами:
![]() ,
, ![]() ,
,
![]() ,
, ![]() (3)
(3)
В случае равнопеременного движения точки по окружности ( =const)
![]() ,
,
![]() ,
,
где 0 — начальная угловая скорость.
Моментом инерции J материальной точки массой m относительно оси вращения называется величина, равная произведению массы точки на квадрат расстояния её до рассматриваемой оси:
![]() .
.
Моментом
инерции системы точек
(тела) относительно оси вращения
называется физическая величина, равная
сумме произведений масс n
материальных точек системы на квадрат
их расстояний до рассматриваемой оси:
![]() .
.
В
случае непрерывного распределения масс
эта сумма сводится к интегралу
![]() ,
где интегрирование производится по
всему объему тела. Величина r
в этом случае есть функция положения
точки с координатами x,
y,
z.
,
где интегрирование производится по
всему объему тела. Величина r
в этом случае есть функция положения
точки с координатами x,
y,
z.
Теорема
Штейнера:
момент инерции тела J
относительно любой оси вращения равен
моменту его инерции Jс
относительно параллельной оси, проходящей
через центр масс C
тела, сложенному с произведением массы
тела на квадрат расстояния а
между осями:
![]() .
.
В таблице 1 приведены значения моментов инерции для некоторых тел (тела считаются однородными, т — масса тела).
Кинетическая энергия вращающегося тела
![]() ,
(4)
,
(4)
где
![]() - момент инерции тела относительно
неподвижной оси вращения Z.
- момент инерции тела относительно
неподвижной оси вращения Z.
Таблица 1 – Моменты инерции некоторых тел
|
Тело |
Ось |
Момент инерции |
|
Полый тонкостенный цилиндр радиуса R (кольцо) |
Ось симметрии |
|
|
Сплошной цилиндр радиуса R (диск) |
Ось симметрии |
|
|
Прямой тонкий стержень длиной l |
Ось перпендикулярна стержню и проходит через его середину |
|
|
Шар радиуса R |
Ось проходит через центр шара |
|
|
Квадратная пластина со стороной а |
Ось проходит через центр масс перпендикулярно квадратному основанию |
|
3.2 Описание экспериментальной установки
Трифилярный подвес представляет собой круглую платформу радиуса R, подвешенную на трех симметрично расположенных нитях одинаковой длины (рисунок 3). Наверху эти нити также симметрично прикреплены к диску несколько меньшего размера (радиуса r). Платформа может совершать крутильные колебания вокруг вертикальной оси OO′ , перпендикулярной к ее плоскости и проходящей через ее центр. Такое движение платформы приводит к изменению положения ее центра тяжести по высоте.
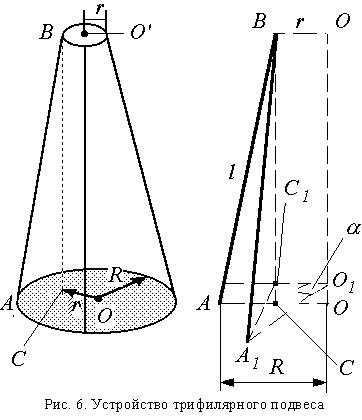
Рисунок 3 – Трифилярный подвес
Если платформа массы m, вращаясь в одном направлении, поднялась на высоту h , то приращение потенциальной энергии будет равно
![]() ,
(5)
,
(5)
где g - ускорение свободного падения.
Вращаясь в другом направлении, платформа придет в положение равновесия (h=0) с кинетической энергией, равной
![]() ,
(6)
,
(6)
где J - момент инерции платформы, ω0 - угловая скорость вращения платформы в момент прохождения ею положения равновесия.
Пренебрегая работой сил трения, на основании закона сохранения механической энергии имеем:
![]() ,
(7)
,
(7)
Считая, что платформа совершает гармонические крутильные колебания, можно записать зависимость углового смещения платформы от времени t в виде
![]() ,
(8)
,
(8)
где 0 - угол максимального поворота платформы, т.е. амплитуда углового смещения;
T - период колебания;
![]() -
циклическая частота колебания.
-
циклическая частота колебания.
Т.к. угловая скорость ω является первой производной по времени от величины углового смещения, то
![]() .
(9)
.
(9)
В
момент прохождения платформы через
положение равновесия (t
=
0;
![]() ;
;
![]() и т.д.)
величина ω(t)
будет максимальна и равна по модулю
и т.д.)
величина ω(t)
будет максимальна и равна по модулю
![]() .
(10)
.
(10)
Из выражений (7) и (10) следует, что
![]() .
(11)
.
(11)
Если l - длина нитей подвеса, R - расстояние от центра платформы до точек крепления нитей на ней, r - радиус верхнего диска (рисунок 3), то высота подъема платформы
![]() .
(12)
.
(12)
Так
как
![]() ,
то можно принять ВС
+ ВС1
=
2l,
тогда (12) запишется в виде
,
то можно принять ВС
+ ВС1
=
2l,
тогда (12) запишется в виде
![]() . (13)
. (13)
Далее:
![]() (14)
(14)
![]()
Из![]() ,
тогда
,
тогда
![]() . (15)
. (15)
Подставляя (14) и (15) в (13), получаем высоту подъема платформы
 . (16)
. (16)
При
малых углах отклонения φ0
значение синуса угла
![]() заменим просто значением
заменим просто значением
![]() .
Тогда (11) примет вид:
.
Тогда (11) примет вид:
![]() ,
откуда
,
откуда
![]() (17)
(17)
По формуле (17) можно экспериментально определить момент инерции пустой платформы или платформы с телом, положенным на нее, так как все величины в правой части формулы непосредственно измеряются. Следует помнить, что m - это суммарная масса платформы и исследуемого тела, положенного на нее.
4. Порядок выполнения работы
-
Ознакомьтесь с параметрами системы, приведенными в таблице 2.
-
Необходимо сначала определить момент инерции J0 ненагруженной платформы. Для этого нужно сообщить прибору при помощи шнура небольшие отклонения, и измерить при помощи секундомера продолжительность некоторого числа n колебаний (n = 40 - 50). Занесите результат измерения в таблицу 2.
-
Повторите пункт 2 еще дважды.
-
Для определения момента инерции груза Jг необходимо определить момент инерции платформы вместе с грузом J=J0+Jг. Поместите груз в виде круглой пластины на платформу так, чтобы центры тяжести платформы и груза совпадали.
-
Сообщите прибору при помощи шнура небольшие отклонения, и измерьте при помощи секундомера продолжительность n колебаний. Занесите результат измерения в таблицу 3.
-
Повторите пункт 5 еще дважды.
-
Проведите опыт (пункты 4-6) для квадратной пластины.
5. Обработка результатов
-
Вычислите период колебаний ненагруженной платформы:
 .
. -
Определите среднее значение периода колебаний ненагруженной платформы.
-
По формуле (17) определите момент инерции ненагруженной платформы J0. Здесь T – средний период колебаний ненагруженной платформы, m=m0 – масса платформы.
-
Вычислите период колебаний нагруженной платформы (круглая пластина).
-
Определите среднее значение периода колебаний нагруженной платформы.
-
По формуле (17) определите момент инерции нагруженной платформы. Здесь T – средний период колебаний нагруженной платформы J, m=m0 +mг– масса платформы вместе с грузом.
-
Повторите пункты 4-6 для квадратной пластины.
-
Заполните таблицу 3 расчетных значений.
Таблица 2 - Параметры системы
|
Наименование |
Значение |
|
Радиус платформы |
R = 75 мм |
|
Радиус верхнего диска |
r = 40 мм |
|
Длина нити |
l= 1,125 м |
|
Масса платформы |
m0 = 110 г |
|
Параметры груза в виде круглой пластины: |
|
|
Масса |
mг= 693 г |
|
Радиус |
Rг = 50 мм |
|
Параметры груза в виде квадратной пластины: |
|
|
Масса |
mг= 674 г |
|
Сторона квадрата |
а = 95 мм |
Таблица 3 – Результаты измерений
|
|
N опыта |
n |
t, с |
tср, с |
Тср, с |
m, кг |
J, кгм2 |
|
Ненагруженная платформа |
1 |
50 |
110.60 |
111.35 |
2.22 |
0.110 |
J0=3.6-4 |
|
2 |
50 |
111.40 |
|||||
|
3 |
50 |
112.05 |
|||||
|
Нагруженная платформа (круглая пластина) |
1 |
50 |
72.57 |
72.42 |
1.49 |
0.6928 |
|
|
2 |
50 |
71.78 |
|||||
|
3 |
50 |
73.32 |
|||||
|
Нагруженная платформа (квадратная пластина) |
1 |
50 |
82.20 |
82.12 |
1.64 |
0.674 |
|
|
2 |
50 |
80.41 |
|||||
|
3 |
50 |
83.75 |
-
Вычислите момент инерции первого груза как разницу моментов инерции нагруженной и ненагруженной платформы:
 .
. -
Определите теоретическое значение момента инерции
 первого груза, представляя его в виде
сплошного цилиндра (таблица 1).
первого груза, представляя его в виде
сплошного цилиндра (таблица 1).
-
Сравните теоретическое и экспериментальное значения моментов инерции первого груза:
 .
. -
Вычислите момент инерции второго груза как разницу моментов инерции нагруженной и ненагруженной платформы:
 .
. -
Определите теоретическое значение момента инерции
 второго груза (таблица 1).
второго груза (таблица 1).
-
Сравните теоретическое и экспериментальное значения моментов инерции второго груза:
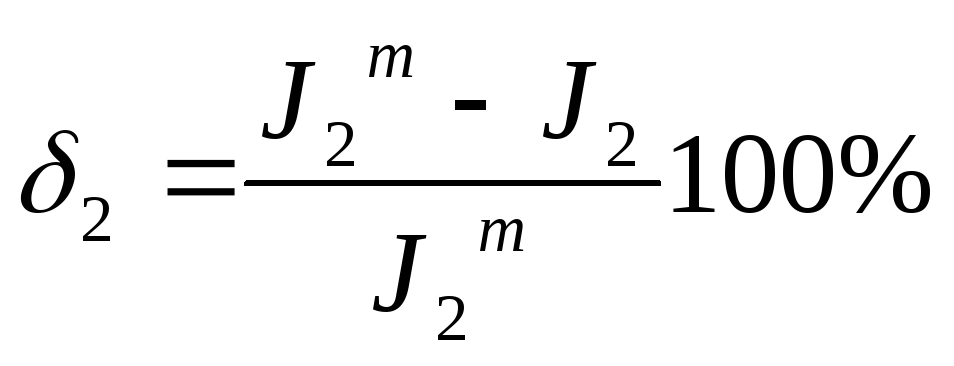 .
. -
Заполните таблицу 4.
Таблица 4 – Моменты инерции тел
|
|
Экспериментальное значение J, кгм2 |
Теоретический
момент инерции
|
δ, % |
|
Круглая пластина |
|
|
|
|
Квадратная пластина |
|
|
|
6 Контрольные вопросы
-
Что называется моментом инерции вращающейся точки?
-
Момент инерции тела относительно неподвижной оси.
-
Угловая скорость и угловое ускорение.
-
Тангенциальная и нормальная составляющие ускорения.
-
Связь между линейными и угловыми величинами.
-
Решите приведенные ниже тестовые задания.
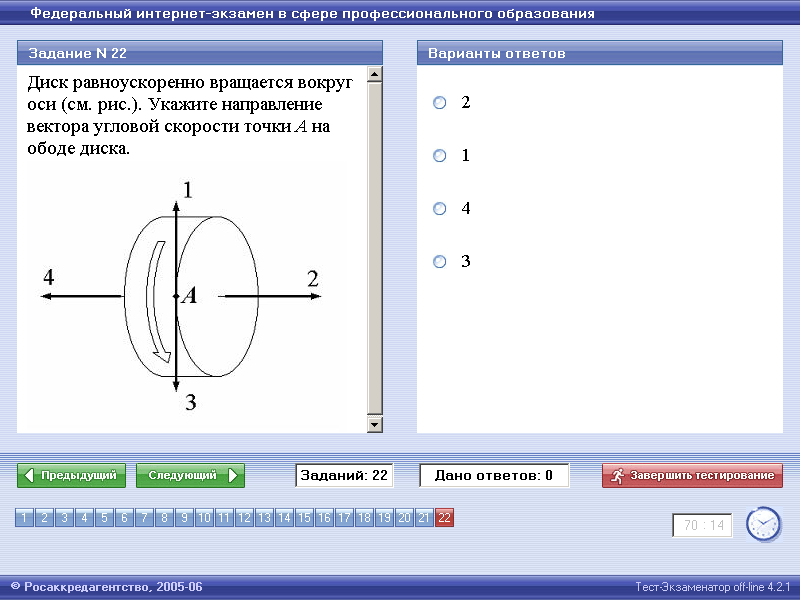
Задание 1
|
Диск равнозамедленно вращается вокруг оси как показано на рисунке. Укажите направление вектора тангенциального ускорения точки А на ободе диска.
|
|
Задание 2
|
Материальная
точка М движется по окружности со
скоростью
|
|
|
|
|
|
Задание 3
|
Материальная
точка движется по окружности согласно
уравнению:
(в рад/с) |
|
|
|
|
|
Задание 4
|
Диск радиуса R начинает вращаться из состояния покоя в горизонтальной плоскости вокруг оси Z, проходящей через его центр. Зависимость проекции угловой скорости от времени показана на графике. Тангенциальные ускорения точек на краю диска в моменты времени t1=2с и t2=7с…
|
|

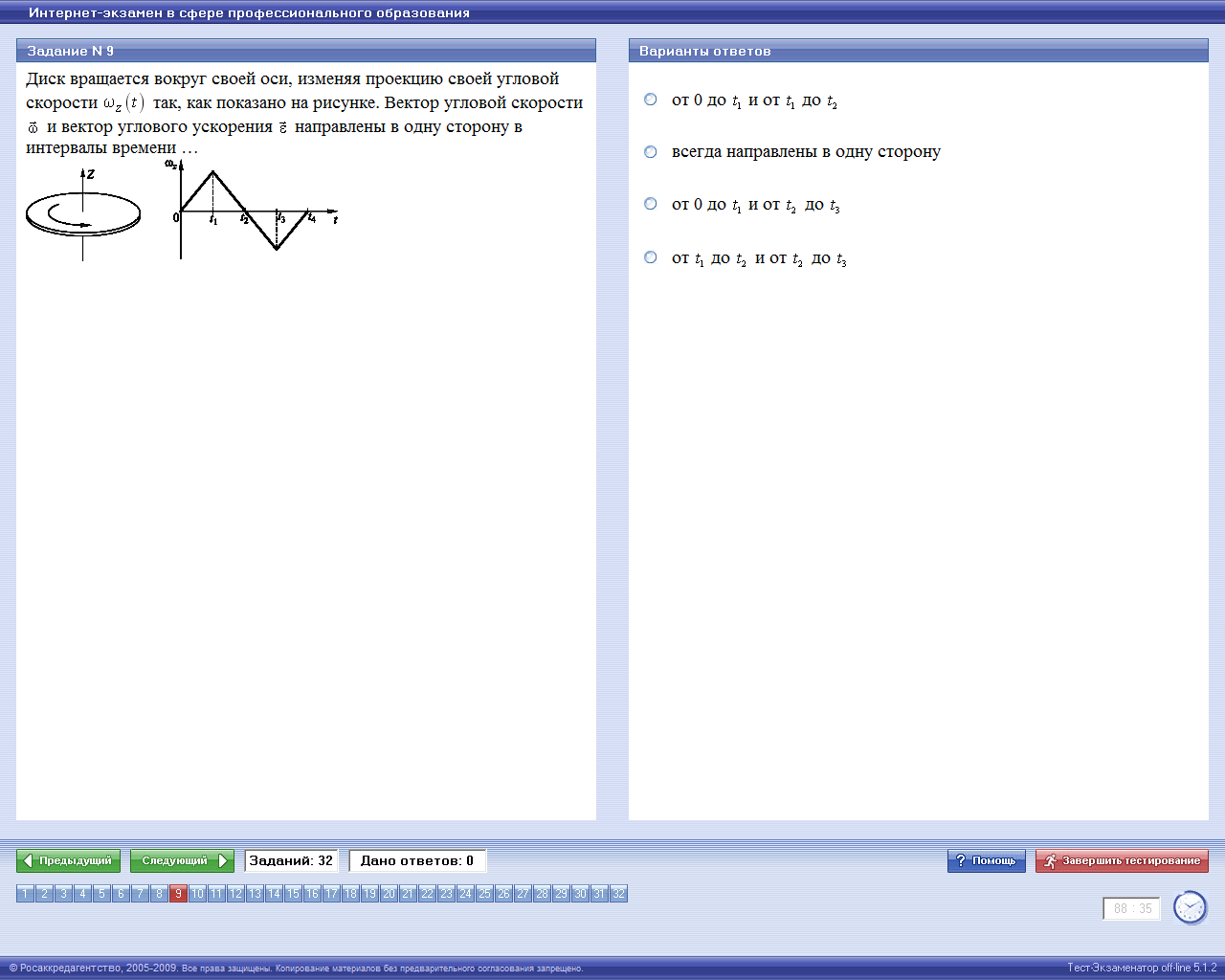
Задание 5
|
Диск
вращается вокруг своей оси, изменяя
проекцию своей угловой скорости
|
|
Задание 6
Шар и полый цилиндр (трубка), имеющие одинаковые радиусы, скатываются без проскальзывания с горки высотой h. Тогда верным утверждением относительно времени скатывания к основанию горки является следующее:
-
быстрее скатится шар
-
быстрее скатится полый цилиндр
-
оба тела скатятся одновременно
Задание 6
|
Два
маленьких массивных шарика закреплены
на концах невесомого стержня длины
d.
Стержень может вращаться в горизонтальной
плоскости вокруг вертикальной оси,
проходящей через середину стержня.
Стержень раскрутили до угловой скорости
|
|
Угловой
скоростью
![]() называется
векторная величина, равная первой
производной угла поворота тела по
времени:
называется
векторная величина, равная первой
производной угла поворота тела по
времени:
![]() .
.
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
Тангенциальная
составляющая ускорения характеризует
быстроту
изменения скорости по модулю (направлена
по касательной к траектории) и равна
![]() .
.
Нормальная
составляющая ускорения
характеризует быстроту изменения
скорости по направлению (направлена
к центру кривизны траектории) и равна
![]()
Таким образом, связь между линейными и угловыми величинами выражается следующими формулами:
![]() ,
, ![]() ,
,
![]() ,
, ![]() (3)
(3)