

1.2. Кинематический анализ сооружений
Прежде чем приступить к расчету модели сооружения, необходимо проверить: способна ли она воспринимать приложенную нагрузку, оставаясь в равновесии? При этом расчетная схема рассматривается как совокупность не деформируемых, а абсолютно жестких тел – дисков, и в отдельный класс выделяются системы, элементы которых обладают подвижностью, то есть могут смещаться относительно друг друга или относительно земли. Такое исследование структуры модели называется ее кинематическим анализом.
Поскольку подвижность системы зависит, очевидно, от вида связей, соединяющих ее элементы, вернемся к рассмотрению и уточнению этих понятий – уже встречавшихся в теоретической механике.
1.2.1. Связи и их реакции
Напомним, что под связью понимают тело, ограничивающее свободу перемещения выбранного рассматриваемого тела, а реакцией связи называют силу, с которой связь действует на это тело.
Будем называть связь линейной, если соответствующая ей реакция – сила и моментной, если соответствующая ей реакция – момент.
Для плоских стержневых систем можно ограничиться рассмотрением следующих видов связей.
Подвижная опора (рис. 1.1) помимо обозначения по ГОСТу (рис. 1.1, а) может на схемах изображаться так, как показано на рис. 1.1, б и 1.1, в. Она соответствует одной линейной связи, а ее реакция перпендикулярна заштрихованной опорной площадке (рис. 1.1, г).

Рис.1.1
Неподвижная опора (рис. 1.2) также допускает на схемах изображения, отличные от стандартного – на рис. 1.2, а. Очевидно, что она эквивалентна двум линейным связям (рис. 1.2, в – г).

Рис.1.2
Жесткое защемление (рис. 1.3, а) исключает не только перемещения закрепленной точки балки, но и ее поворот вокруг этой точки. Оно эквивалентно двум линейным связям и одной моментной (рис. 1.3, б), либо трем линейным связям при 0 (рис. 1.3, в).
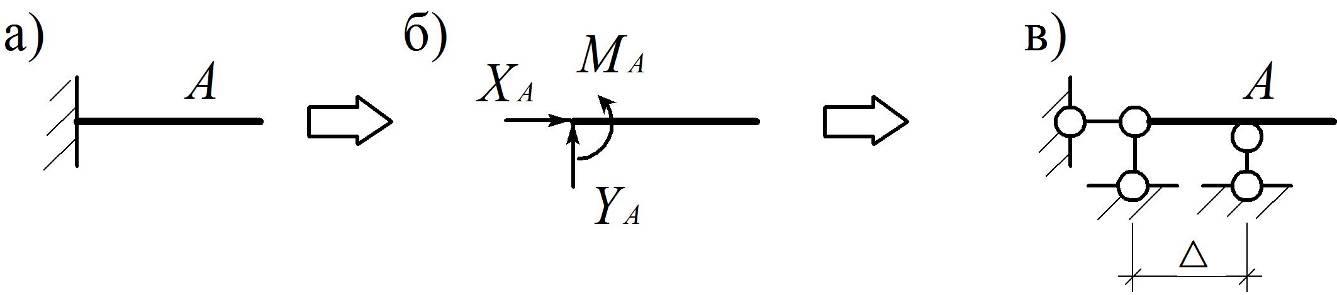
Рис.1.3
Скользящее защемление (рис. 1.4, а – б) в отличие от жесткого не препятствует смещению закрепленной таким образом точки в одном из направлений и эквивалентно линейной и моментной связям (рис. 1.4, в) либо двум линейным при 0 (рис. 1.4, г).
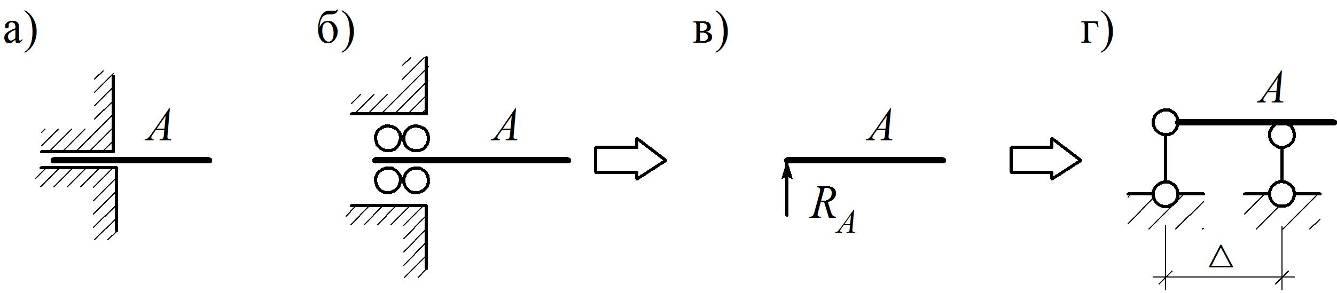
Рис.1.4
Кратный шарнир, соединяющий N дисков, (рис. 1.5, а) эквивалентен (N – 1) простому шарниру (рис. 1.5, б).
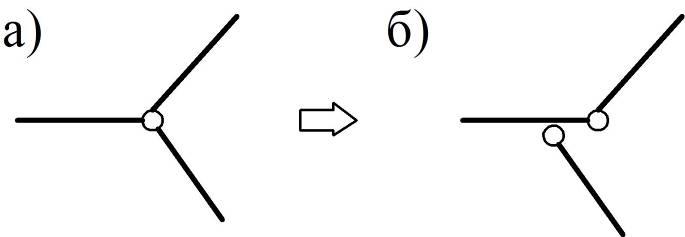
Рис.1.5
Примечания:
1. Результаты расчета можно улучшить, если учесть податливость соединений элементов системы.
2. Построение расчетной схемы действующего сооружения может оказаться непростой задачей, соизмеримой по сложности с самим расчетом.
1.2.2. Степени свободы и статическая определимость системы
Все системы в механике можно разделить на два класса: неизменяемые системы (НС) и изменяемые системы (ИС).
Определение 1.1. Неизменяемыми или неподвижными будем называть системы, элементы которых не могут перемещаться относительно друг друга или относительно земли, если они являются абсолютно твердыми, то есть недеформируемыми.
Изменяемыми или подвижными будем называть системы, элементы которых могут перемещаться относительно друг друга или относительно земли, оставаясь абсолютно твердыми
НС могут воспринимать любую нагрузку, ИС – только определенные виды нагрузок.
Например, рама на рис. 1.10, а является НС и может воспринимать как горизонтальную, так и вертикальную нагрузку, оставаясь в положении равновесия. А раму на рис. 1.10, б можно загрузить вертикальной нагрузкой, но она не способна воспринимать горизонтальную нагрузку, под действием которой она придет в движение – подобно незакрепленному на рельсах монтажному крану под действием ветра.
Нетрудно догадаться, что в строительстве в основном применяют неизменяемые системы – изменяемые здесь используют довольно редко и с большой осторожностью (в отличие от машиностроения, где наоборот интерес представляют изменяемые или подвижные системы).
Все неизменяемые системы делятся на статически определимые (СОС) и статически неопределимые системы (СНС).
Напомним, что СОС – это системы, для которых число неизвестных реакций внешних и внутренних связей не превышает максимально допустимого числа уравнений статики, которые можно составить для их определения.
Если число неизвестных больше максимально допустимого числа уравнений, система называется СНС. При этом разность между числом неизвестных и числом уравнений называется степенью статической неопределимости системы.
Чтобы описать изменяемые системы введем следующее
Определение 1.2. Под степенью свободы системы – W будем понимать минимальное число параметров, определяющих ее положение в пространстве.
Очевидно, что для неподвижных систем W = 0, а для подвижных W ³ 1. Для точки на плоскости W = 2, и в качестве параметров можно выбрать ее декартовы координаты. Чтобы однозначно определить положение твердого тела (диска) на этой плоскости нужно задать уже три параметра. Например – координаты фиксированной точки A этого диска xA , yA и угол наклона j принадлежащего ему отрезка AB (рис. 1.6). Таким образом, для диска W = 3, а система N дисков на плоскости будет иметь 3N степеней свободы.
Если два свободных диска на плоскости (W = 6) соединить одной линейной связью C1C2, получим систему с пятью степенями свободы (рис. 1.7), поскольку к трем параметрам для первого диска добавятся углы j1 и j2, определяющие положение стержня C1C2 относительно диска Д1 и диска Д2 относительно точки C2. Аналогично, система двух дисков, соединенных двумя линейными связями (или шарниром) будет иметь 4 степени свободы.
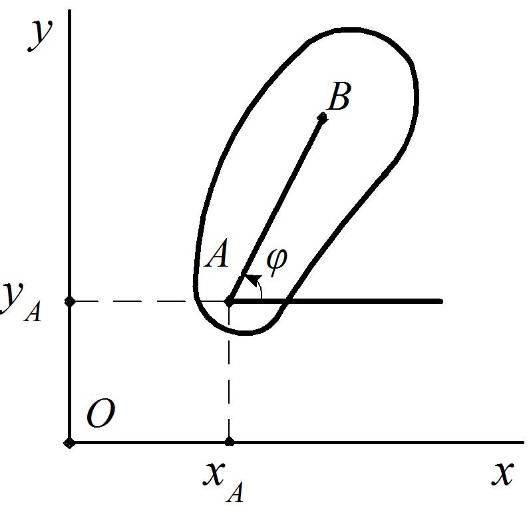
Рис.1.6

Рис.1.7
Естественно предположить, что всякое наложение дополнительной связи уменьшает степень свободы системы на единицу, поэтому для произвольной плоской системы ее можно найти по формуле:
W* = 3Д 2Ш СО , (1.1)
где W* – предполагаемая или условная степень свободы системы;
Д – число дисков;
Ш – число простых шарниров, соединяющих диски друг с другом;
СО – число опорных связей.
Как видим, при рассмотрении любой системы возможны три варианта:
1) W* > 0 – система заведомо подвижна;
2) W* = 0 – система имеет минимальное число связей, необходимых для ее неизменяемости;
3) W* < 0 – система содержит избыточные связи.
На самом деле наше предположение о том, что в формуле (1.1) W* = W неверно. Дело в том, что не всякая дополнительная связь уменьшает степень свободы системы – нетрудно представить связь, которая просто дублирует наложенную ранее, не меняя степени свободы системы.
Итак, условие W* £ 0 является необходимым, но недостаточным для образования неподвижной системы.
Если все же при условии W* < 0 система окажется неподвижной, то она одновременно будет и статически неопределимой, а число ее лишних связей можно найти по формуле:
Л = W* = СО + 2Ш 3Д (1.2)
Пример 1.1. Определить число лишних связей рамы (рис. 1.8).
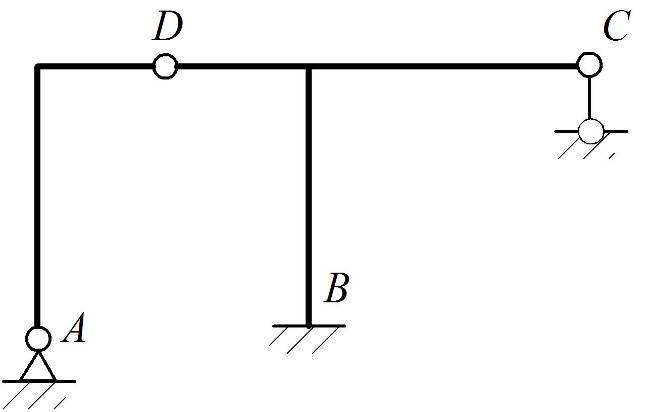
Рис.1.8
Решение. 1) Методом теоретической механики: общее число неизвестных реакций в опорах А, В, С и соединительном шарнире D равно восьми, максимально допустимое число уравнений для их определения – 6 (по три для каждого из дисков AD и DBC), число лишних связей Л = 8 – 6 = 2.
2) По формуле (1.2):
Л = 6 + 2×1 – 3×2 = 2.
Для плоских ферм применять формулы (1.1) и (1.2) неудобно: если С – число стержней фермы, а У – число ее узлов, то во-первых будет слишком много дисков Д = С, а во-вторых почти все шарниры будут кратными.
Гораздо проще найти степень ее свободы из следующих соображений: каждый узел имеет две степени свободы, а каждый стержень, как линейная связь, уменьшает общее число степеней свободы на единицу, откуда получим:
W* = 2У – С – СО (1.3)
Л = W* = С + СО 2У. (1.4)
Пример 1.2. Определить степени свободы системы (рис. 1.9).
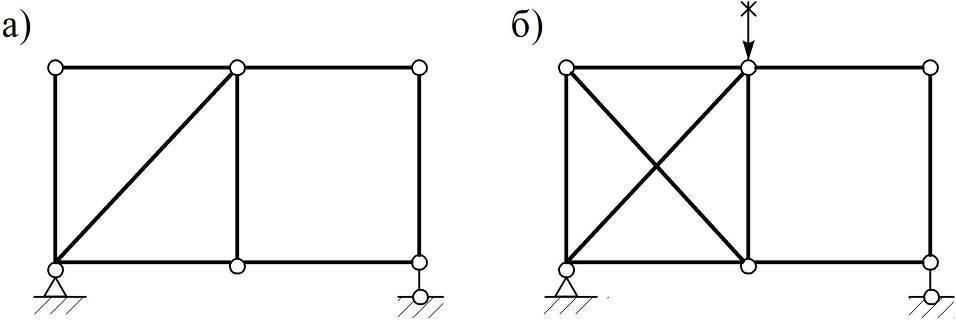
Рис.1.9
Решение. По формуле (1.3) находим:
– для схемы а): W* = 2×6 – 8 – 4 = 0;
– для схемы б): W* = 2×6 – 9 – 3 = 0.
Таким образом, необходимое условие неизменяемости выполняется для каждой из ферм, но только первая из них будет неподвижной. Система на рис. 1.9, б является изменяемой, и не может воспринимать показанную нагрузку, оставаясь в состоянии равновесия.
Примечания:
1. Мы выяснили, что степень свободы зависит не только от того, какие элементы образуют систему, но и как они соединяются друг с другом. При неправильном образовании в одной части системы связи дублируют друг друга, а в другой – их недостаточно и система в целом оказывается изменяемой, как в примере на рис. 1.9, б. Вопрос о том, какие системы будут неподвижными, остается открытым.
2. Полезно рассмотреть еще одно
Определение 1.3. Степень свободы системы W равна минимальному числу дополнительно введенных связей, превращающих ее в неизменяемую систему.