

1.3. Расчет скоростей методом планов
По известному значению угловой скорости кривошипа 1 определяем линейную скорость точки А [1]:
![]() .
(1.2)
.
(1.2)
Вектор скорости VA направлен перпендикулярно звену OА в сторону его вращения.
Шатун совершает плоскопараллельное движение. В связи с этим скорости его точек В и А связаны зависимостью [1.3]
→ → →
VB=VA+VBA, (1.3)
где VA – переносная скорость; VBA – относительная скорость; VB – абсолютная скорость точки В.
Относительная скорость VBA направлена перпендикулярно шатуну, т.к. последний в относительном движении вращается вокруг мгновенно неподвижной точки А.
Вектор VB направлен параллельно направляющей ползуна.
Уравнение (1.3) содержит два неизвестных и может быть решено. Графическое его решение называется планом скоростей.
Для построения плана скоростей надо выбрать масштабный коэффициент μV.
где рvа – длина отрезка, которым скорость VA изображается на плане скоростей.
μv
=
![]() =0,1
=0,1
![]()
Графическое решение уравнения (1.3) для третьего положения приведено на рис. 4.
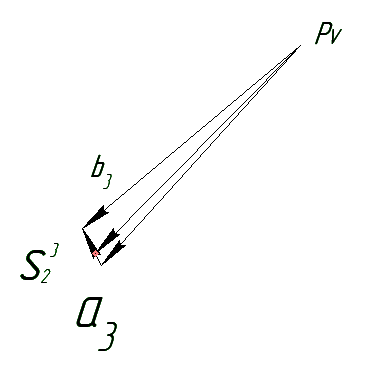
Рис. 4
Скорость Vs2 центра масс шатуна определяется по свойству подобия плана скоростей.
![]()
![]()
![]()
Отрезок as2 откладываем на плане скоростей от точки а4 (рис. 4). Полученную точку s2 плана соединяем с полюсом рv. Отрезок pvs2 изображает VS2.
Расчет скоростей в третьем положении механизма:
VBA = a3b3∙μv =46.1*0.1 =4.61 м/с;
VB = pvb3∙μv = 6.8*0.1 = 0.68м/с;
VS2 = pvs2∙μv =47.3*0.1 =4.73 м/с;
Расчет скоростей выполнен для 12 положений механизма. Результаты представлены в табл. 1.
Таблица 1.
-
Скорость
№ п/п
VA
VBA
VB
VS2
ω1
м/с
1/c
0
4,8
0
4.80
3,20
80
1
3,20
3,89
3,91
2
4,77
1,91
4,70
3
4,61
0,68
4,73
4
3,32
3,04
4,12
5
1,69
4,50
3,44
6
0
4,80
3,20
7
1,75
3,92
3,60
8
3,64
1,92
4,35
9
5,09
0,74
4,90
10
5,05
3,14
4,66
11
3,09
4,54
3,74
1.4. Расчет ускорений методом планов
При расчете ускорений считаем, что кривошип вращается с постоянной угловой скоростью, тогда ускорение точки А кривошипа вычисляется по формуле [1, 3]
аА = ω12r =802*0.060=384 м/с2. (1.4)
Ускорение аВ точки В шатуна связано с ускорением точки А кривошипа зависимостью [1, 3].
→ → → →
аВ = аА + аnВА+ аτАВ , (1.5)
где аА – переносное ускорение; аnВА и аτАВ – нормальная и тангенциальная составляющие относительного ускорения.
Ускорение аА направлено параллельно кривошипу из точки А к центру О вращения звена, ускорение аnВА – параллельно шатуну, а аτАВ – перпендикулярно АВ.
Ускорение точки В шатуна направлено параллельно направляющей ползуна.
Уравнение (1.5) имеет два неизвестных. Графическое его решение для третьего положения механизма приведено на рис. 5.
Масштабный коэффициент плана ускорений:
![]() =1.92
=1.92
![]()
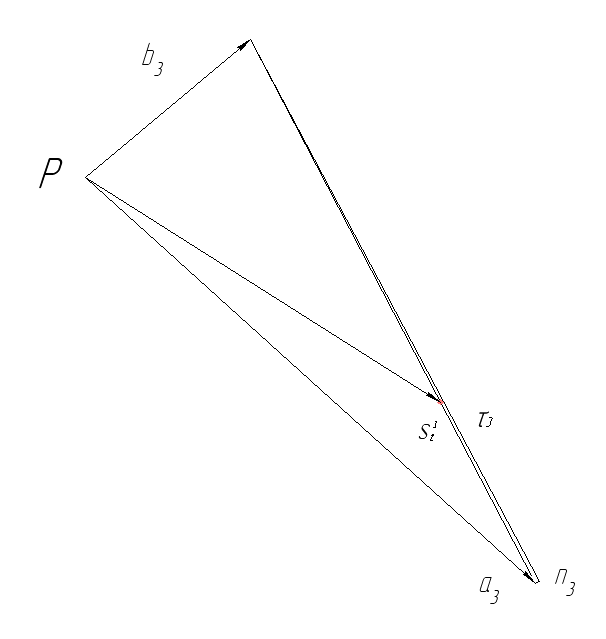
Рис. 5
Длина отрезка n3a3, которым изображается на плане ускорений anBA, вычисляется следующим образом:
N3a3 = anBA/μа =2.53 м/с2.
Ускорение аS2 центра масс шатуна определяется по свойству подобия плана ускорений. Составляем пропорцию:
![]()
![]()
Отрезок а4s2 откладываем на плане ускорений на отрезке а4b4 от точки а4. Полученную точку s2 соединяем с полюсом pa плана. Отрезок s2pa изображает в масштабе μа ускорение центра масс шатуна.
Расчет ускорений:
аτBA = n3b3∙μa =202.81*1.92 =389.39м/с2;
aBA = a3b3∙μa = 202.8*1.92=389.37м/с2;
aB = pab3∙μa =70.99*1.92=136.30м/с2;
aS2 = pas2∙μa =138.6*1.92=266.11м/с2.
Расчет углового ускорения шатуна:
![]() =
=
![]() =2163
1/с2.
=2163
1/с2.
Расчет ускорений выполнен для двух положений механизма. Результаты приведены в табл. 2.
Таблица 2
-
Ускоре-ние
№ п/п
aA
anBA
aτBA
aBA
aS2
aB
ε2
м/с2
1/с2
3
384
2.53
389.39
389.37
266.11
136.3
2163