

Гироскоп. Ориент-ие
.docxГироскопическое ориентирование.
Гирокомпас — это по существу гироскоп, то есть вращающееся колесо (ротор), установленное в кардановом подвесе, который обеспечивает оси ротора свободную ориентацию в пространстве.
Предположим, ротор начал вращаться вокруг своей оси, направление которой отлично от земной оси. В силу закона сохранения момента импульса, ротор будет сохранять свою ориентацию в пространстве. Поскольку Земля вращается, неподвижный относительно Земли наблюдатель видит, что ось гироскопа делает оборот за 24 часа. Такой вращающийся гироскоп сам по себе не является навигационным средством. Для возникновения прецессии ротор удерживают в плоскости горизонта, например, с помощью груза, удерживающего ось ротора в горизонтальном положении по отношению к земной поверхности. В этом случае сила тяжести будет создавать крутящий момент, и ось ротора будет поворачиваться на истинный север. Поскольку груз удерживает ось ротора в горизонтальном положении по отношению к земной поверхности, ось никогда не может совпадать с осью вращения Земли (кроме как на экваторе).
История создания.
Разработка и применение в геодезии и маркшейдерском деле гироскопического метода ориентирования были бы невозможны без создания гироскопических приборов, отвечающих требованиям геодезического и маркшейдерского производства. Суть этих требований обычно сводится к точности и времени однократного определения азимута, надежности и удобству прибора в эксплуатации. Современный гирокомпас представляет собой сложный прибор, и для его создания потребовались многие десятилетия упорной работы. Поэтому небезынтересно бросить взгляд назад и, хотя бы коротко, проследить этот путь, тем более что многие сведения, связанные с отдельными этапами развития гирокомпаса, помогут нам в дальнейшем понять принцип работы современных приборов гироскопического ориентирования. Первые попытки создания подобных приборов были направлены на разработку гироскопического компаса, удовлетворяющего требованиям маркшейдерского производства, где проблемы ориентирования подземных съемок стояли наиболее остро, при этом основное внимание уделялось достижению заданной точности прибора. Ограничение по времени определения азимута в первые годы создания этих приборов не накладывалось. Прототип современного гирокомпаса создан в Германии (запатентован в 1908 г.) и в США (Э. Сперри, патент 1911 г.). Правда, это были гирокомпасы для кораблей. Но многие идеи и конструктивные решения, примененные в них, использовались на первых порах и в наземных приборах гироскопического ориентирования.
Конструктором первого наземного гирокомпаса является немецкий ученый-механик Максимилиан Шулер – сотрудник фирмы «Аншютц». В 1919-1921 годах эта фирма изготовила гирокомпас, масса которого составила 350 кг, а время измерения одного азимута – 6 ч. В 1924-1925 годах в Германии разрабатывается более совершенная модель прибора, известная под названием «гирокомпас Шулера – Лемана»
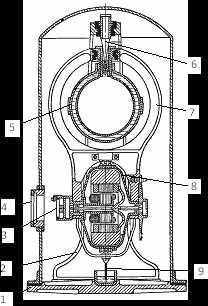
Рисунок 1 - Гирокомпас фирмы «Аншютц» ( 1 – опорная плита; 2 – нижняя подковообразная обойма; 3 – зеркало ЧЭ; 4 – окно для наблюдения за ЧЭ; 5 – сосуд с ртутью; 6 – центрирующая шпилька; 7 – верхняя обойма; 8 – кожух с гиромотором; 9 – контактный штифт.
В настоящее время наиболее совершенные модели гироскопических приборов для ориентирования подземных сетей выпускают в Германии и Японии. Гиротеодолит GYROMAT-2000 немецкой фирмы DMT является полностью автоматизированным прибором, обладающим превосходными характеристиками.
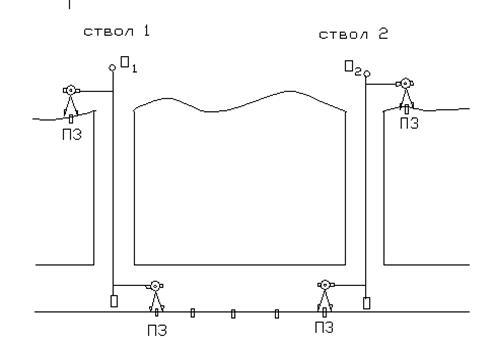
Гироскопический способ является одним из самых прогрессивных способов автономного ориентирования. Этот метод позволяет в любое время, на различной глубине и при произвольном расстоянии от ствола определять азимут или дирекционный угол направления в подземных выработках. В этом случае также отпадает необходимость остановки работы в стволе или прекращения подземных строительных работ на время ориентирования, как это делается при других видах ориентирования.
Гироскопическое ориентирование выполняют при помощи гиротеодолитов или гиронасадок. Непосредственно перед ориентированием и сразу после него на линии с известным дирекционным углом (сторона триангуляции или линия основной полигонометрии), расположенной вблизи ствола, определяют постоянную поправку гиротеодолита.
Постоянную поправку гиротеодолита ∆ вычисляют по формуле
∆ = αисх - αгир.исх + γисх - δисх,(27.22)
где αисх - дирекционный угол исходного направления, по которому определяется постоянная поправка; αгир.исх - азимут исходного направления, определенный гиротеодолитом; γисх - сближение меридианов для исходного направления; δисх - поправка за уклонение отвесных линий в исходное направление.
Длина стороны, используемой в качестве исходной для определения постоянной поправки гиротеодолита, должна быть не меньше 100 м, а длина определяемой стороны - более 30 м. В подземных выработках определяют прямой и обратный дирекционные углы, переставляя гиротеодолит с одной конечной точки линии полигонометрии на другую.
При выполнении специальной программы гироскопического ориентирования высокоточным гиротеодолитом можно определить дирекционный угол направления со средней квадратической ошибкой 5 - 10’’.