

Teoria_uprugosti_Ch2_Ledovskoy_12
.pdfМинистерство образования и науки Российской Федерации
Санкт-Петербургский государственный архитектурно-строительный университет
И. В. ЛЕДОВСКОЙ, В. В. РОЩИН, О. Б. ХАЛЕЦКАЯ, Г. С. ШУЛЬМАН
ТЕОРИЯУПРУГОСТИ
Учебно-методическое пособие
Часть II
Санкт-Петербург
2012
1

Теория упругости. Часть II
УДК539.3/8(07)
Рецензенты:
д-р техн. наук, профессор В. Б. Шпильман (СПбГПУ); канд. техн. наук, доцент Н. Б. Левченко (СПбГАСУ)
Ледовской, И. В.
Теория упругости: учеб.-метод. пособие. В 2 ч. Ч. II / И. В. Ледовской, В. В. Рощин, О. Б. Халецкая, Г. С. Шульман; СПбГАСУ. –
СПб., 2012. – 83 с.
ISBN 978-5-9227-0349-9
Пособиесостоитиздвухчастей:впервой–текстызадачкурсовойработы, во второй – методические указания по решению этих задач.
Предназначено для выполнения курсовой работы студентами, обучающимися по специальностям 270205 – автомобильные дороги и аэродромы и 270201 – мосты и тоннели, а также может быть использовано студентами других строительных специальностей при изучении основ теории упругости.
Табл. 4. Ил. 41. Библиогр.: 6 назв.
РекомендованоРедакционно-издательскимсоветомСПбГАСУ в качестве учебного пособия.
ISBN978-5-9227-0349-9 |
И. В. Ледовской, В. В. Рощин, |
|
О. Б. Халецкая, Г. С. Шульман, 2012 |
|
Санкт-Петербургский государственный |
|
архитектурно-строительный университет, 2012 |
Предисловие
Курсоваяработапотеорииупругостипредполагаетрешениеряда задач, и студенты должны представить эту работу до экзамена (зачета) в установленные сроки. Методические указания должны облегчить выполнение этих задач и повысить эффективность изучения теории упругости.
Вовторойчастиучебно-методическогопособияприведеныпри- меры решения следующих задач:
•исследование напряженно-деформированного состояния
вточке;
•определение статических и кинематических граничных условий на контуре пластинки;
•определение внешних нагрузок, приложенных к телу, в простейших задачах теории упругости обратным методом;
•исследование изгиба прямоугольной полосы;
•исследование поперечного изгиба тонких плит. Теоретический материал, необходимыйдля решения этих задач,
изложен в ряде учебников, список которых приведен в конце второй частиучебногопособия.Таккаквтеорииупругостииспользуютсяразличные обозначения даже в одной и той же системе координат, в методических указаниях приведенасистема обозначений,котораярекомендуется студентам при выполнении указанной работы (см. ч. 1).
Перед выполнением каждой задачи рекомендуется ответить на вопросы по самоконтролю, приведенные в первой части.
2 |
3 |
Теория упругости. Часть II
Задача 1. ИССЛЕДОВАНИЕ НАПРЯЖЕННОДЕФОРМИРОВАННОГО СОСТОЯНИЯ В ТОЧКЕ ТЕЛА
Цель решения задачи – усвоение основ теории напряжений и деформаций. При этом предполагается, что напряженно-деформи- рованное состояние тела было определено ранее расчетами или экспериментально.
1.1. Напряженное состояние в точке тела
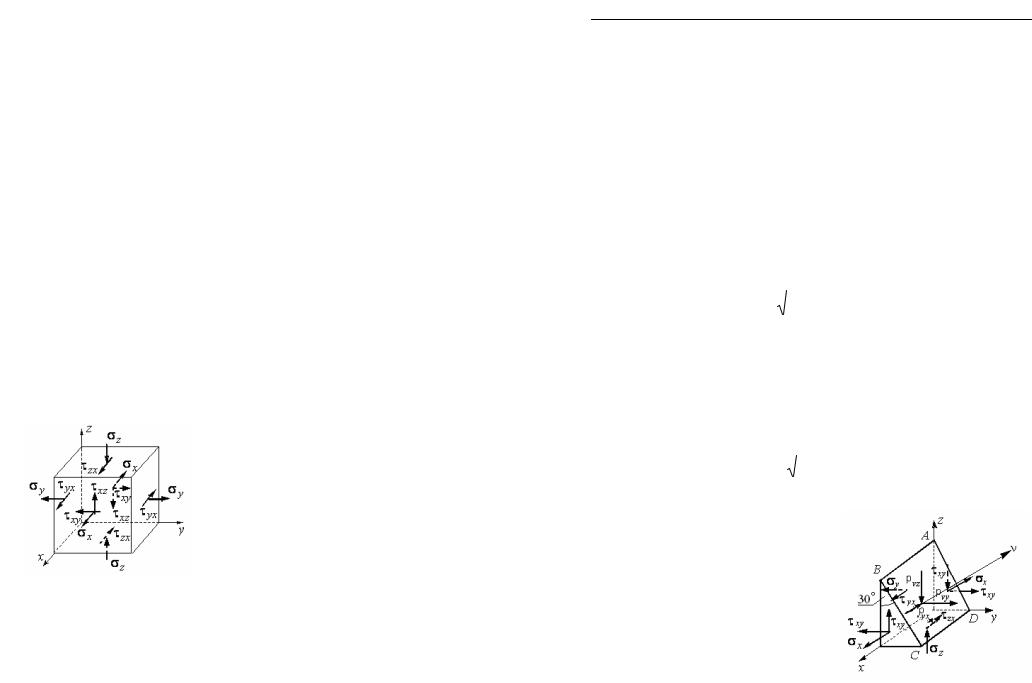
Мысленно вырежем в окрестности произвольной точки М нагруженного телаэлементарный (бесконечно малый) параллелепипед, грани которого перпендикулярны координатным осям x, y, z (рис. 1).
Условиезадачи.Компонентынапряжений,действующиепограням параллелепипеда, равны следующим величинам:
σx = 40 МПа; |
τxy = τyx = −40 МПа; |
|
σy =80 МПа; |
τyz = τzy = 0; |
(1.1) |
σz = −60 МПа; |
τzx = τxz = −50 МПа. |
|
Эти компоненты напряженного состояния показаны на рис. 1 |
||
|
сучетомправилазнаков,принятоговте- |
|
|
ории упругости (см. ч. 1). |
|
|
Совокупностьнормальныхикаса- |
|
|
тельных напряжений на трех взаимно |
|
|
перпендикулярных площадках |
|
|
|
σx, τxy |
|
|
|
||||
|
|
, τxz |
|||||||
|
|
τyx, σy |
, τyz |
||||||
|
|
τ |
zx, |
τ |
zy |
, σ |
z |
|
|
Рис. 1 |
|
|
|
|
|
||||
называют тензором напряжений. |
|||||||||
|
|||||||||
|
Напряженноесостояние НС в точ- |
||||||||
ке полностью определено, если известны шесть компонентов тензо-
ранапряжений σx ,σy , σz , τxy , τyz , τzx (см. рис. 1), т. е., зная эти шесть компонентов напряжений в точке, можно вычислить напряжения на
любой площадке, проходящей через эту точку.
4
Задача 1. Исследование напряженно-деформированного состояния в точке тела
1.1.1. Полное, нормальное и касательные напряжения на наклонной площадке
Найдем напряжения на некоторойнаклонной к осям x, y, z площадке, проходящей через заданную точку. Положение площадки относительно осей координат определяется направляющими косинусами l, m, n внешней нормали ν к этой площадке. Вначале вычисляем значения проекций на оси координат x, y, z полного напряжения pν по формулам
pνx = σx l + τxy m + τxz n; |
|
|||
pνy = τyx l + σy m + τyz n; |
(1.2) |
|||
pνz = τzx l + τzy m + σz n. |
||||
|
||||
Затем находим величину полного напряжения: |
|
|||
pν = |
|
. |
|
|
pν2x + pν2y + pν2z |
(1.3) |
|||
Зная проекции pνx , pνy , pνz полного напряжения, действующегопонаклоннойплощадке,можноопределить нормальное σν и касательное τν напряжения по формулам
σν = pνx l + pνy m + pνz n =
= σx l2 +σy m2 +σz n2 +2(τxy l m +τyz mn +τzx nl); |
(1.4) |
||
|
|
. |
(1.5) |
τν = |
(pν2 −σν2 ) |
||
Рассмотримприменениеформул(1.2)–(1.5),используяисходные |
|||
данные (1.1). |
|
|
|
Пустьположениевнешнейнор- |
|
||
мали к площадке ABCD (рис. 2) от- |
|
||
носительно координатных осейx, y, z |
|
||
определено следующими значениями |
|
||
направляющихкосинусов(см.табл.1.2 |
|
||
учебного пособия, ч. 1): |
|
|
|
l = cos(νx) = cos90 = 0; |
|
|
|
m = cos(νy) = cos30 = 0,866; |
|
||
cos(νz) = cos60 = 0,5. |
|
Рис. 2 |
|
|
5 |
|
|

Теория упругости. Часть II
Полезно проверить правильность величин направляющих косинусов подстановкой их в выражение
l 2 + m2 + n2 =1, |
(1.6) |
которое должно превращаться в тождество.
Подставляя значения напряжений и направляющих косинусов в формулы (1.2), получим:
pνx = 40 0 − 40 0,866−50 0,5 = −59,6 МПа;
pνy = −40 0 +80 0,866+0 0,5= 69,3 МПа; |
(1.7) |
pνz = −40 0 +0 0,866−60 0,5= −30,0 МПа.
Составляющие полного напряжения, имеющие знак «минус», противоположны направлениям осей x и z . Положительная состав-
ляющая pνy направлена вдоль положительной оси y (см. рис. 2).
Значения pν , σν и τν , вычисленные по формулам
(1.3)–(1.5) с учетом заданных напряжений (1.1) и направляющих косинусов, имеют следующие значения:
pν = 96,2 МПа, σν = 44,8МПa;
τν =85,0 МПа.
Напряжение σν имеет
знак «плюс». Следовательно, Рис. 3 оно будет направлено от сече-
ния (рис. 3).
1.1.2. Вычисление проекции касательного напряжения на заданное направление
Направление касательного напряжения τν в плоскости сечения
свнешнейнормалью ν относительнолюбыхдвухортогональныхосей
ξи χ, лежащих в той же плоскости, определяется следующим образом..
Задача 1. Исследование напряженно-деформированного состояния в точке тела
Вначале определяются проек- |
|
|
ции полного напряжения pν на оси |
|
|
ξ и χ в виде τνξ и τνχ (рис. 4). |
χ |
|
Затем угол α между касатель- |
||
|
||
ным напряжением τν и, например, |
|
|
осью χ найдем по формуле |
|
|
α = arctg(τνξ /τνχ). |
Рис. 4 |
|
Напомним, как найти, напри- |
|
мер, τνξ – проекцию полного напряжения pν на ось ξ. Обозначим
направляющие косинусы оси ξ как l1 , m1 , n1 и спроектируем |
|
pνx , pνy , pνz на ось ξ: |
|
τν ξ = pνx l1 + pνy m1 + pνz n1. |
(1.8) |
Подставляя в (1.8) вместо pνx , pνy, pνz их значения в виде (1.2), |
|
получим |
|
τνξ = σxl l1 +σymm1 + σznn1 + |
|
+ τxy (l m1 +l1 m)+ τyz (mn1 + m1 n)+ τzx (nl1 + n1 l). |
(1.9) |
Здесь l, m, n – направляющие косинусы внешней нормали ν
к площадке, по которой действует касательное напряжение τν . Рассмотрим вновь трехгранную призму, показанную на рис. 3.
Найдем проекцию касательного напряжения τx , действующую по
площадкеВСКнаось ξ, т.е. касательноенапряжение τx ξ (см. рис.3). Внешняя нормаль к площадке ВСК совпадает с положительной
осью x, и ее направляющие косинусы |
|
|
l =1; m = 0; |
n = 0. |
(1.10) |
Направляющие косинусы оси ξ имеют следующие значения: |
||
l1 = 0; m1 = 0,5; |
n1 = −0,866. |
(1.11) |
Вычислим касательное напряжение τxξ по формуле (1.9) с уче-
том (1.1), (1.10) и (1.11):
τx ξ = 40 1 0 +80 0 0,5−60 0 (−0,866)−(−40)[1 0,5+0 0] +
+0[0 (−0,866)+0 0] +50[0 0 +(−0,866) 1] = −63,3 МПа.
6 |
7 |
|
|
Теория упругости. Часть II |
||
Поскольку внешняя нормаль к площадке совпадает с положитель- |
||||
ной осью x , то отрицательное касательное напряжение τxξ будет на- |
||||
правленовсторону,противоположнуюнаправлениюосиξ (см.рис.3). |
||||
1.1.3. Главные напряжения, определение положения |
||||
|
|
главных площадок |
||
Однойизважнейшихзадачинженерныхрасчетовявляетсяоцен- |
||||
ка прочности материалов в наиболее напряженных точках конструк- |
||||
ций. Для решения этой задачи применяют теории прочности, в кото- |
||||
рых используются главные напряжения. |
||||
|
3 |
σ2 |
В окрестностях любой точки на- |
|
3 |
груженного тела всегда имеются три |
|||
|
||||
|
|
|
взаимно перпендикулярные площад- |
|
|
σ1 |
σ1 |
ки, на которых касательные напряже- |
|
|
нияобращаютсяв ноль,асоответству- |
|||
|
σ2 |
|
||
|
|
ющие полные напряжения перпенди- |
||
|
|
|
||
|
σ3 |
1 |
кулярны этим площадкам. Такие |
|
2 |
|
|
площадкиназываютсяглавными, нор- |
|
|
Рис. 5 |
|
мали к ним – главными осями, а нор- |
|
|
|
мальные напряжения – главными на- |
||
|
|
|
||
пряжениями (рис. 5). Главные напряжения обозначим в порядке убы- |
||||
вания σ1 ≥ σ2 ≥ σ3 . |
|
|
||
Полные напряжения, действующие по множеству площадок, |
||||
проходящих в окрестности исследуемой точки, находятся в интерва- |
||||
ле σ1 ≥ pν ≥ σ3 . Величины главных напряжений являются корнями кубического уравнения
|
σ3 − I1σ2 + I2σ − I3 = 0, |
(1.12) |
где |
I1 = σx + σy + σz ; |
|
I 2 |
= σ x σ y + σ y σ z + σ z σ x − τ2xy − τ2yz − τ2zx ; |
(1.13) |
I3 = σxσyσz + 2τxyτyzτzx −τ2xyσz −τ2yzσx −τ2zxσy .
I1, I2 , I3 – инварианты напряженного состояния, которые не меняются при повороте координатных осей.
Задача 1. Исследование напряженно-деформированного состояния в точке тела
Используя заданные напряжения (1.1), вычислим инвариан-
ты (1.13):
I = 60 МПа; |
I |
2 |
= −8100 МПа2 ; |
I |
3 |
= −296 000 МПа3. |
(1.14) |
1 |
|
|
|
|
|
||
Подставим значения инвариантов в кубическое уравнение (1.12) |
|||||||
и получим: |
|
|
|
|
|
|
|
σ3 −60σ2 −8100σ + 296000 = 0. |
(1.15) |
||||||
Чтобыуменьшить величиныкоэффициентов вуравнении(1.15),
воспользуемсяподстановкой σ =10x .Послепреобразованийполучим уравнение
x3 − 6x2 −81x − 296 = 0. |
(1.16) |
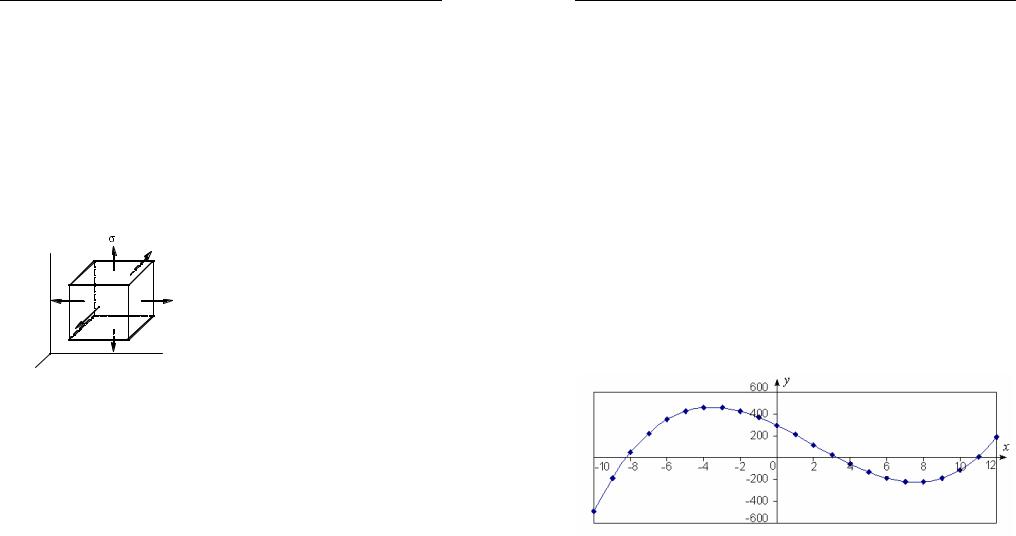
Для отыскания корнейкубического уравнения имеются готовые формулы (см. справочники по математике), но ими пользоваться неудобно. В наше время можно пользоваться какой-либо вычислительной программой, например Mathcad. В этой программе очень просто построить график функции:
f (x) = x3 −6x2 −81x − 296.
Точки пересечения графика этой функции с осью абсцисс дадут корни полинома, т. е. значения, как это показано на рис. 6.
Рис. 6
Если устудента нет компьютераилион неумеетпользоваться комплексом Mathcad, то можно решить уравнение (1.15) «вручную», т. е. сначала путем подбора надо найти одно значение, обращающее в ноль полином в правой части (1.16). Допустим, этоx = 3,29. Затем де-
ление полинома (1.16) на (y −3,29) приводит к квадратномууравнению
8 |
9 |

Теория упругости. Часть II
x2 − 2,71x −89,916 = 0. |
(1.17) |
Корнями этого уравнения будут два числа: –8,22 и 10,9. Следовательно, корнями уравнения (1.16) являются числа
x1 =3,29; x2 = −8,22; |
x3 =10,9. |
|
Числа x1, x2 , x3 , |
увеличенные в 10 раз, являются главными на- |
|
пряжениями σ1 , σ2 , σ3 . Полагая σ1 > σ2 > σ3 , получим |
|
|
σ1 =109 МПа; |
σ2 = 32,9 МПа; σ3 = −82,2 МПа. |
(1.18) |
Выполним проверку найденных значений главных напряжений, вычисливинварианты напряженного состоянияи сравнивих сисходными значениями (1.14):
I1 = σ1 +σ2 +σ3 = 60;
I2 = σ1σ2 +σ2σ3 +σ3σ1 ≈8090;
I3 = σ1σ2σ3 ≈ 296 000.
Разница междуинвариантамиприповороте осейкоординатвозникает за счет приближенного вычисления напряжений (1.18), и в нашем случае она меньше 1 %.
Если площадка, наклонная к осям x, y, z , является главной, то полное напряжение, действующее по этой площадке, будет перпен-
дикулярно к ней, т. е. pν = σν и его составляющие по осям координат
x, y, z равны |
|
pνx = σν l; pνy = σν m; pνz = σν n, |
(1.19) |
где l, m, n – направляющие косинусы нормалиν к главной площадке. Направляющие косинусы нормали ν к главной площадки найдем следующим образом. Подставим в уравнения (1.5) вместо pνx ,
pνy , pνz их выражения в виде (1.19) и получим систему уравнений
(σx −σν)l + τxy m + τxz n = 0; |
|
τyz l +(σy −σν ) m + τyz n = 0; |
(1.20) |
τzx l + τzy m + (σz −σν) n = 0.
Тривиальное решение системы уравнений (1.20) в виде l = m = n = 0 не может быть искомым решением, так как не будет выполняться соотношение (1.6)
Задача 1. Исследование напряженно-деформированного состояния в точке тела
l 2 + m2 + n2 =1.
Найдем искомые значения l, m, n , решая систему, состоящую из уравнения (1.6) и любых двух уравнений (1.20) (например, первых двух) при условии, что σν = σ1 =109МПа, а компоненты напряжения имеют значения в виде (1.1):
l2 + m2 + n2 =1; |
|
(40−109,3)l −40 m +50 n = 0; |
(1.21) |
−40l +(80−109,3) m = 0.
Используя два последних уравнения (1.21), выразим l и n через m иподставим ихв первое уравнение (1.21). Такимобразом, получим квадратное уравнение относительно m, из которого определяем два значения m. После определения l и n из двух последних уравнений (1.20) получим окончательное решение системы уравнений (1.21) в виде
l = −0,582; |
m = 0,789; |
n = −0,171 |
или |
|
|
l1 = 0,582; |
m1 = −0,789; |
n1 = 0,171. |
Возникновение двух наборов направляющих косинусов в качестве решения уравнений (1.21) связано с тем, что при повороте на 180° нормали к любой главной площадке изменяются только знаки направляющих косинусов этойнормали(рис.7).Точ-
ность вычисления l, m, n – направляющих косинусов нормали к первой главной площадке – проверяется путем подстановки в урав-
нение (1.6).
Таким образом, два набора направляющих косинусов соответствуют противоположным граням
элементарного параллелепипеда. Рис. 7
10 |
11 |
Теория упругости. Часть II
1.2. Деформированное состояние в точке тела
При нагружении в теле возникнут не только напряжения, но и деформации – изменения взаимногорасположения точектела. Рас-
смотрим деформации элементарного параллелепипеда со сторонами dx, dy, dz в окрестности точки тела М (рис. 8), по граням которого
действуют заданные компоненты тензора напряжений (1.1).
Связь между деформациями и напряжениями определяется линейными соотношениями обобщенного закона Гука:
εx = |
1 |
|
[ σx −µ(σy + σz )]; |
γxy = |
|
1 |
|
τxy ; |
|
||
E |
|
G |
|
||||||||
|
|
|
|
|
|
|
|
||||
εy = |
1 |
|
[ σy − µ(σz + σx )] ; |
γyz = |
1 |
|
τyz ; |
(1.22) |
|||
E |
|
|
G |
||||||||
|
|
|
|
|
|
|
|
||||
εz = |
1 |
|
[ σz −µ(σx + σy )] ; |
γzx = |
1 |
|
τzx , |
|
|||
E |
|
G |
|
||||||||
|
|
|
|
|
|
|
|
||||
где E – модуль упругости материала; µ – коэффициент Пуассона,
модуль сдвига G = 2(1E+µ).
По формулам(1.22) компоненты деформации в точке при задан-
ныхкомпонентахнапряжений(1.1)и E = 2 105 МПa, µ = 0,25 имеют следующие значения:
εx =1,75 10−4; |
εy = 4,25 10−4; |
εz |
= −4,5 10−4; |
(1.23) |
γxy = −5 10−4; |
γyz = 0; |
γzx |
= 6,25 10−4. |
(1.24) |
Согласно результатам вычислений отрезки MK и MD, направленные соответственно вдоль осей x и y на рис. 8, удлинятся, а отрезок МА укоротится; прямой угол между ребрами параллелепипеда вплоскости xy увеличится, вплоскости xz уменьшится, а в плоскости yz останется без изменений.
Рис. 8
Задача 1. Исследование напряженно-деформированного состояния в точке тела
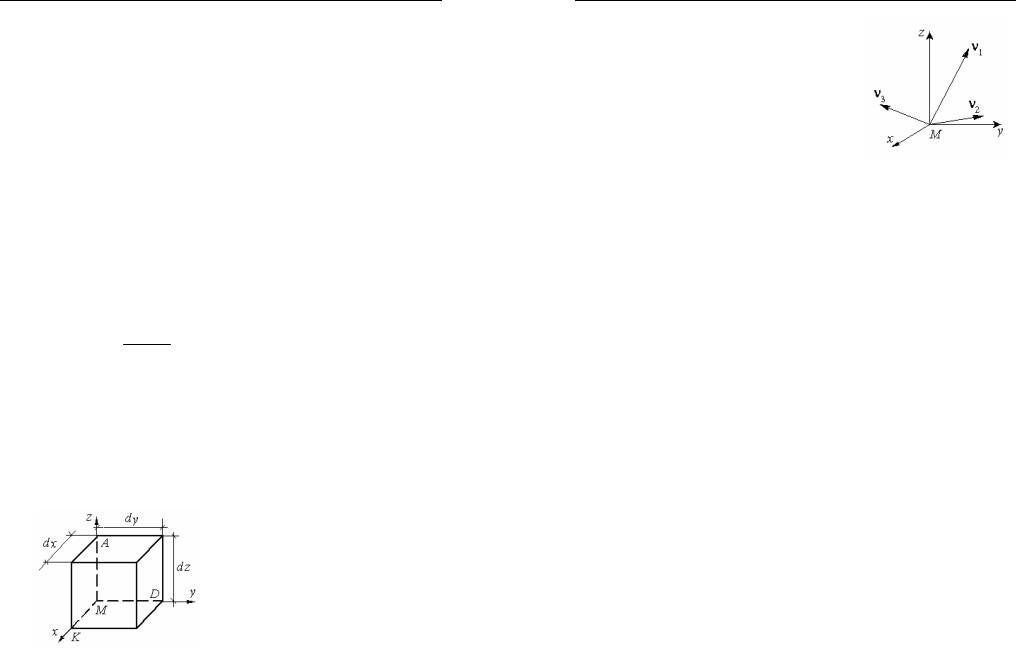
Если известны три компоненты линейнойдеформации εx , εy , εz итрикомпо-
ненты угловой деформации γxy , γyz , γzx
в данной точке, то можно определить линейную деформацию в любом направлении и искажение угла между любыми взаимно перпендикулярными бесконечно малыми отрезками, проведенными из этой
точки. Рис. 9 Например,пустьизнекоторойточкиM
(рис. 9) нагруженного тела проведены три луча ν1,ν2 ,ν3 , имеющие соответствующие направляющие косинусы:
ν1(l1, m1, n1), ν2 (l2 , m2 , n2 ), ν3 (l3 , m3 , n3 ).
Ни один из этих лучей не параллелен осям x, y, z и, кроме того, лучи ν2 иν3 взаимноперпендикулярны,т.е.имеетместосоотношение
l2 l3 + m2 m3 + n1 n2 = 0.
Линейная деформация εν1 в направлении луча ν1 вычисляется по формуле
ε |
ν |
= ε |
l 2 +ε |
y |
m2 +ε |
n2 + |
|
|
|
x 1 |
1 |
z 1 |
|
||
|
1 |
|
|
|
|
|
|
+ γxy l1 m1 + γyz m1 n1 + γzx n1 l1. |
(1.25) |
||||||
Деформация сдвига между лучами ν2 и ν3 определяется из сле- |
|||||||
дующего выражения: |
|
|
|
|
|
|
|
γν2,ν3 = 2(εxl2l3 +εym2m3 +εzn2n3 )+ |
|
||||||
+ γxy (l2m3 +l3m2 )+ γyz (m2n3 + m3n2 )+ γzx (n2l3 + n3l2 ). |
(1.26) |
||||||
1.2.1. Определение линейной, угловой и объемной деформаций
Компоненты деформаций в точке тела M имеют, например, значения (1.23) и (1.24). Требуется вычислить линейную деформацию в
направлении ν1 (см. рис. 9), заданном направляющими косинусами относительно осей x, y, z (см. табл. 1.2 пособия, ч. 1):
12 |
13 |
Теория упругости. Часть II
l = 0,8; |
m = 0,5; |
n = −0,332. |
(1.27) |
Подставляявформулу(1.25)значениякомпонентовдеформации (1.23) и направляющих косинусов (1.27), получим
εν =1,75 10−4 0,82 + 4,25 10−4 0,52 − 4,5 10−4(−0,332)2 − −5 10−4 0,8 0,5+6,25 10−4 0,5(−0,332) = −1,35 10−4.
Знак «минус»означает, что в направлении ν1 произойдет укоро-
чение бесконечно малого отрезка, проведенного из точки М.
ДляопределенияугласдвигамеждуотрезкамиBAи BCна рис. 2
совместим с этими отрезками оси ξ |
и η: |
|||
для оси |
ξ |
l1 = 0; |
m1 = 0,5; |
n1 = −0,866; |
для оси |
η |
l3 = −1; |
m3 = 0; |
n3 = 0. |
Подставляязначениякомпонентовдеформацииинаправляющих косинусов в (1.26), получим
γηξ = 2[1,75 10−4 0(−1)+ 4,25 10−4 0,5 0 −4,5 10−4(−0,866)0] −
−5 10−4[0 0 +(−1)0,5] +6,25 10−4[(−0,866)(−1)+ 0 0] = 7,91 10−4.
По закону Гука (1.22)
τηξ = Gγηξ = 0,8 10+5 7,9125 10−4 = 63,3 MПа.
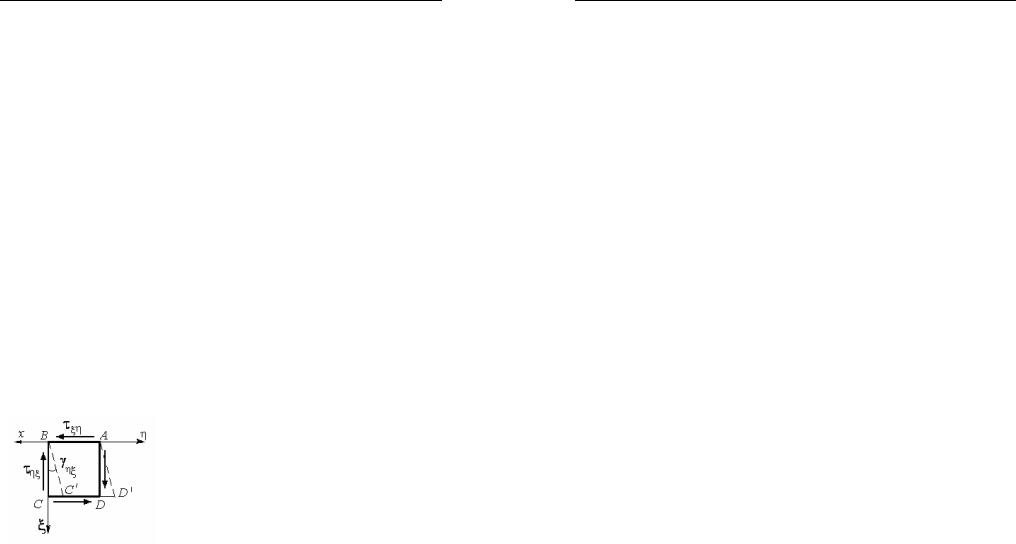
|
Поскольку деформация сдвига поло- |
|
жительна, то произойдет уменьшение пря- |
|
мого угла междуBA и BC на величину γηξ |
|
(см. рис. 2). Угловая деформация γηξ по- |
|
казана на рис. 10 при условии, что в про- |
|
цессе деформации положение отрезка BA |
Рис. 10 |
остается неизменным. |
Ранее было вычислено касательное |
напряжение τxξ = −63,3 МПа (см.рис.3),прикоторомуголмеждуося-
ми х и ξ увеличился. Так как ось η имеет направление, противоположное направлению оси х, то и
τηξ = −τxξ.
Задача 1. Исследование напряженно-деформированного состояния в точке тела
Объемная деформация |
|
εV = εx + εy + εz |
(1.28) |
не зависит от ориентации осей x, y, z . Если подставить в (1.28) вместо εx , εy , εz их значения в виде (1.23), то получим εV =1,5 10−4 . Так
как эта деформация оказалась положительной, то в окрестности рассматриваемой точки произойдет увеличение объема.
14 |
15 |
Теория упругости. Часть II
Задача 2. ПОСТАНОВКА КИНЕМАТИЧЕСКИХ И СТАТИЧЕСКИХ ГРАНИЧНЫХ УСЛОВИЙ
Задачей теории упругости является определение напряжений, деформаций и перемещений в любой точке тела, возникающих при заданных объемных и поверхностных нагрузках, а также кинематических граничных условиях на его поверхности.
Рассмотрим вопрос о том, как задаются граничные условия на поверхности тела.
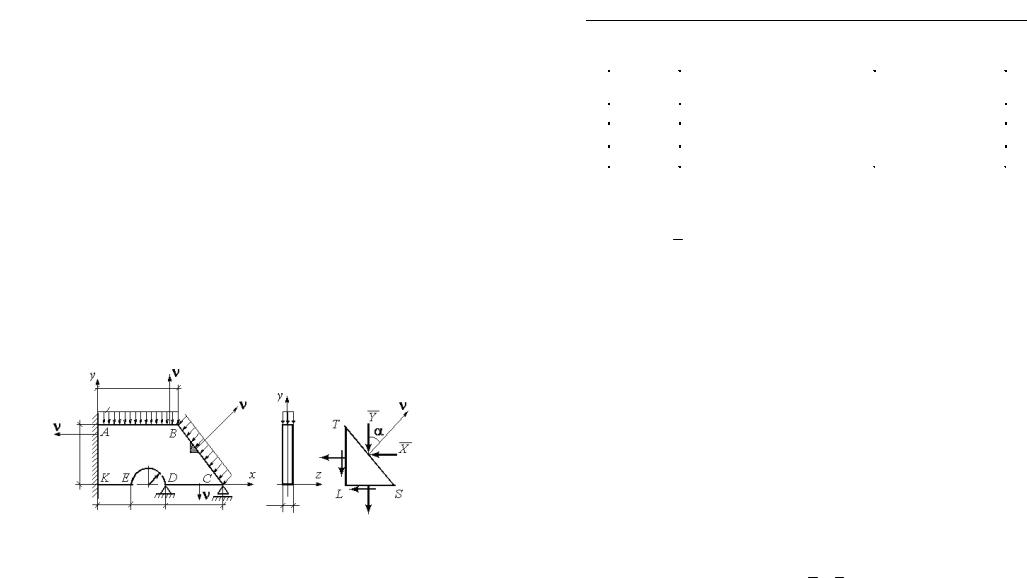
На тонкую пластинку, показанную на рис. 11, наложены связи, препятствующие перемещению пластинки как жесткого тела в плоскости xy . Любые перемещения точек пластинки происходят лишь за счет ее деформации. Эти перемещения разложим на составляющие u, v, w, параллельные соответствующим осям координат x, y, z . Ограничения, которыесвязинакладываютнаперемещенияточекконту-
ра пластинки, называют кинематическими граничными условиями.
a) |
c |
|
б) |
в) |
q1 =1 кН/м2 |
|
|
|
|
h |
|
|
q2 = 2 кН/м2 |
|
|
|
|
|
|
|
r |
|
|
|
a |
2r |
2a |
t |
|
Рис. 11
На участке AK контура пластинки (рис. 11, а) имеется жесткая связьпластинкиснеподвижнымиабсолютнотвердымтелом,длявсех точекконтактаобоихтелсоблюдаютсяусловия u = v = 0 .Контурпластинки в точках C и D имеет дискретные связи с тем же абсолютно твердымтелом.ПеремещенияточкиD контурапластинкиравнынулю, т. е. u = v = 0 . Из двух перемещений точки C в плоскости пластинки лишь одно, параллельное оси y , равно нулю, а другое, параллельное осиx,врезультатедеформацийпластинкиможетиметьместо(табл.2.1).
Задача 2. Постановка кинематических и статических граничных условий
|
|
|
Таблица 2.1 |
|
|
Кинематическиеграничныеусловия |
|||
|
|
|
|
|
Участок |
Уравнения участка |
Перемещение |
|
|
контура |
контура |
|
||
|
|
|||
АK |
x = 0; |
0 ≤ y ≤ h |
u = v = 0 |
|
|
y = 0; |
x =3a + 2r |
uC ≠ 0; vC = 0 |
|
Точка C |
|
|||
|
y = 0; x = a + 2r |
uD = vD = 0 |
|
|
Точка D |
|
|||
Кпластинке приложены поверхностные нагрузки, параллельные
ееплоскости ираспределенныеравномерно по ее толщинеt (рис. 11,б). Проекция интенсивности поверхностных нагрузок вдоль оси z равна
нулю, т. е. Z = 0 ; кроме того, равны нулю и объемные силы X =Y = Z = 0 . В связи с этим напряженное состояние в любой точке
определяется только тремя компонентами напряжения: σx ,σy , τxy , лежащимиводнойплоскости.Этинапряженияможносчитатьпостоянными по толщине (составляющие напряжения σz , τzx , τzy равны
нулю в точках, прилегающих к боковым поверхностям пластинки, и без существенной ошибки можно предположить, что они обращаются в нуль и по толщине пластинки). Таким образом, в пластинке имеет место плоское напряженное состояние.
В дальнейшем обсуждении толщина пластинки не имеет значения, и этот размер полагается равным единице. Компоненты напря-
жения σx ,σy , τxy меняются непрерывно от точки к точке по всей
пластинке; при достижении границ последней они должны быть такими, чтобы уравновесить внешние силы, приложенные по контуру. Рассмотрим малую трехгранную призму TSL (рис. 11, в). Ее грань TS совпадаетсграницейпластинки(см.рис.11,а).Проекциинаоси x и y интенсивности поверхностных нагрузок, приложенных к контуру
пластинки,равнысоответственно X иY .Условияравновесиянаконтуре пластинки будут иметь следующий вид (см. рис. 11, в):
|
|
|
= σx l + τxy m; |
|
|
X |
(2.1) |
||||
|
|
|
|
||
Y |
= τxy l + σy m, |
||||
|
|||||
где l и m – направляющие косинусы нормали ν к контуру пластинки.
16 |
17 |
Теория упругости. Часть II
Уравнения (2.1) называютсястатическимиграничнымиусловиями.
Контур пластинки состоит из пяти прямолинейных участков и полуокружности. Значения проекции поверхностных нагрузок
X иY и направляющих косинусов l и m нормалей ν к отдельным
участкам контура пластинки приведены в табл. 2.2.
Таблица 2.2
Значения X,Y , l, m наконтурепластинки
Уча- |
Уравнение участка контура |
l |
m |
|
|
|
|
|
|
|||
|
X |
|
Y |
|
||||||||
сток |
|
|
|
|
|
|
|
|
|
|
|
|
AB |
y = h; 0 ≤ x ≤ c |
0 |
|
1 |
0 |
|
–1 |
|||||
BC |
y =(3a + 2r − x) tg α, |
sin α |
cos α |
−2sin α |
−2cos α |
|||||||
c ≤ x ≤ (3a + 2r) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
CD |
y = 0;(a + 2r) < x < (3a + 2r) |
0 |
|
–1 |
0 |
|
0 |
|
||||
|
|
|||||||||||
|
y2 +[х−(a + r)]2 = r2, |
|
|
|
|
|
|
|
|
|
|
|
ED |
− |
y |
(a + r)− x |
0 |
|
0 |
|
|||||
a ≤ x ≤ (a + 2r) |
r |
|
r |
|
|
|||||||
KE |
y = 0 при0 ≤ x < a |
0 |
|
–1 |
0 |
|
0 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекция интенсивности поверхностных нагрузок X (Y ) имеет знак «плюс», если совпадает с положительной осью координат x (y), и знак «минус», если противоположна положительной оси x (y).
Такимобразом,рольграничныхусловийвтеорииупругостизаключается в следующем:
•при помощи статических граничных условий(2.1) обеспечивается равновесие внутренних и внешних сил на поверхности нагруженного тела (см. рис. 11, в);
•при помощи кинематических граничных условий соблюдается совместимость перемещений точек тела в результате деформаций с наложенными на тело связями (см. рис. 11, а);
•при интегрировании дифференциальных уравнений теории упругости появляются постоянные интегрирования (или функции интегрирования), которые определяются из граничных условий.
Задача 3. РЕШЕНИЕ ПРОСТЕЙШИХ ЗАДАЧ В ТЕОРИИ УПРУГОСТИ ОБРАТНЫМ МЕТОДОМ. ОПРЕДЕЛЕНИЕ НАГРУЗОК, ПРИЛОЖЕННЫХ К ТЕЛУ
3.1.Основные уравнения теории упругости
1.Статические уравнения (дифференциальные уравнения равновесия внутри тела – уравнения Навье):
∂σ |
x |
+ |
∂τxy |
+ |
∂τ |
xz |
+ X = 0; |
|
||||||
|
|
|
∂y |
|
|
|
||||||||
∂x |
|
|
|
|
|
|
∂z |
|
|
|||||
∂τyx |
+ |
|
∂σy |
|
+ |
|
∂τyz |
+Y = 0; |
(3.1) |
|||||
∂x |
|
∂y |
|
|
∂z |
|||||||||
|
|
|
|
|
|
|
|
|||||||
∂τ |
zx |
+ |
|
∂τzy |
|
|
+ |
|
∂σ |
z |
+ Z = 0. |
|
||
|
|
∂y |
|
|
|
|
|
|||||||
∂x |
|
|
|
|
|
|
∂z |
|
|
|||||
При выводе уравнений (3.1) использованы допущения о сплошности материала и малости деформаций.
2. Геометрические уравнения (соотношения между деформациями и перемещениями – уравнения Коши):
εx = |
∂u |
; |
γxy = |
∂u |
+ |
|
∂v |
; |
|
|
∂x |
|
|
∂y |
|
|
∂x |
|
|
εx = |
∂v |
; |
γyz = |
∂v |
+ |
∂w |
; |
(3.2) |
|
|
∂y |
|
|
∂z |
|
|
∂y |
|
|
εx = |
∂w ; |
γzx = |
∂w + |
∂u . |
|
||||
|
∂z |
|
|
∂x |
|
|
∂z |
|
|
При выводе уравнений (3.2) также использованы допущения о сплошности материала и малости деформаций.
Таккакшесть компонент деформацийвыражаютсятолькочерез три компоненты смешения u, v, w, то деформации не могут быть независимымидруготдруга.Зависимости,выражающиенепрерывность деформаций тела без трещин, – это условия сплошности Сен-Венана в виде шести уравнений совместности деформаций:
18 |
19 |