

лабораторная работа 5 мехатроника
.docxБалтийский государственный технический университет «ВОЕНМЕХ» им. Д.Ф. Устинова
Кафедра мехатроники, автоматизации и управления
Лабораторная работа №5
Программирование системы управления мехатронного модуля с шаговым приводом
Выполнил:
Студент гр. К481
Черников А.А.
Преподаватель:
Кулёмин В.Ю.
Санкт – Петербург
2011
Цель работы: закрепление теоретического материала, приобретение навыков разработки программы управления движением рабочего органа мехатронного модуля, изучение способов задания скоростей, ускорений, положений рабочего органа мехатронного модуля.
-
Разработка программы движения рабочего органа мехатронного модуля:
- Создание новой программы позиционирования рабочего органа мехатронного модуля:
- Загрузка проекта программы в контроллер по ссылке Compile/Project и проверка программы.

- Проверка программы в пошаговом режиме Execute step и в цикле Start Continues Run.
-
Изучение способа задания скоростей, ускорений, положений рабочего органа с дискретных входов:
2.1. добавление значения позиции в регистр позиции:
Po_1: N001 G29 @1 X@10;
Po_2: N002 G29 @2 X@15;
Po_3: N003 G29 @3 X@25;
Po_4: N004 G29 @4 X@30.
Где @n – регистр позиции, X@n – используемый регистр позиции
2.2.задание скоростей:
N001 G01 X@1 FX10;
N002 G01 X@2 FX20;
N003 G01 X@3 FX15;
N004 G01 X@4 FX10.
Где X@n – регистр позиции, FXn – скорость позиционирования в % от максимальной скорости.
2.3. задание ускорений:
N001 G08 X@1 X10;
N002 G08 X@2 X15;
N003 G08 X@3 X15;
N004 G08 X@4 X20.
Где X@n – регистр позиции, Xn – ускорение в % от максимального ускорения.
-
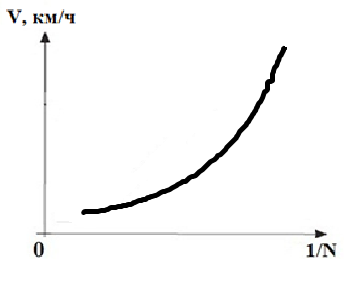
Графики параметров движения рабочего органа мехатронного модуля:
-
V = f (1/N)
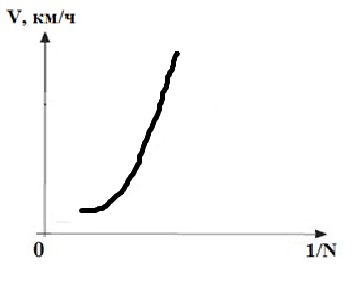
-
a = f (1/N)
4. Выводы:
1) Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя (более крупный шаг соответствует большей скорости движения;
2) Перемещение рабочего органа ограничено программируемыми контроллером критическими положениями;
3) Необходимая величина ускорения/торможения выбирается в процентном отношении от максимального значения и считается активным, пока не будет задано другое значение;
4) Запись в регистры позиций позволяет повысить производительность работы и уменьшить количество ошибок.