

8. Модель двигателя постоянного тока и пример расчета.
В этом и следующих разделах пособия будут рассмотрены примеры использования программы АС 3.1 для моделирования часто встречающихся систем электропривода. В качестве объекта моделирования в этом и следующих разделах будем рассматривать электродвигатель постоянного тока параллельного возбуждения типа П62.
Данные двигателя взяты из справочника.
Номинальная мощность, Рн 8 кВт
Номинальная скорость, nн 1000 об/мин
Номинальный ток, Iн 43 А
Номинальное напряжение Uн 220 В
Сопротивление якоря, Ra = (rя+rДП) 0.328 Ом
Сопротивление возбуждения пар. обмотки, Rв 136 Ом
Число активных проводников якоря, N 558
Число параллельных ветвей якоря, 2а 2
Магнитный поток полюса полезный, Ф 10.7 мВб
Номинальный ток возбуждения пар. обмотки, Iвн 1.23
Максимально допустимая частота вращения, nmax 1500 об/мин
Момент инерции якоря, JД 0,65 кг·м2
Число полюсов, 2р 2
Коэффициент компенсации двигателя k 0,5
Так как технические данные электродвигателя приведены при температуре окружающей среды 20 °С, то необходимо пересчитать все сопротивления на рабочую температуру 80°С. Для расчета параметров использованы известные формулы. Кроме того, пусть приведенный момент инерции механизма JмравенJД, тогда суммарный момент инерцииJ= 2JД= 1.3 кг·м2. В итоге получаем:
Сопротивление якоря Ra = 1,24·(rя+rДП) = 0.4 Ом
Номинальная частота вращения ωн = nн∙2π/60 = 105 рад/с
Конструктивный коэффициент αФ = (Uн-IнRа)/ωн = 1.93 Вс/рад
Электромеханическая постоянная Тм = JRа/(αФ)2 = 0.14 с
Индуктивность якорной обмотки La = kUн/Iнpωн = 0,012 Гн
Электромагнитная постоянная Та = La/Ra = 0,03 с
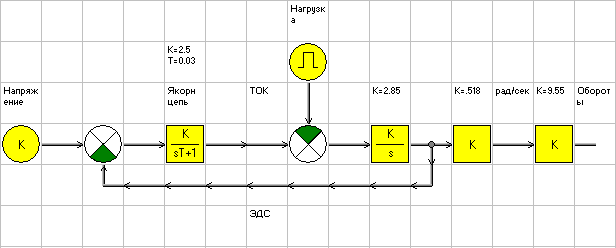
Модель
двигателя с указанием параметров
представлена на рис. 8.1. Звено 4 введено
для перевода угловой частоты вращения
в обороты. Звено 2 приведено к виду
![]() ,
где
,
где![]() .
.

а)
б)
Рис.8.1 a) расчетная модель ДПТ;
б) модель ДПТ в программе АС 3.1 (файл DPT1.sa).
Моделируются два последовательных режима: прямой пуск двигателя от сети постоянного тока напряжением 220 вольт на холостом ходу и последующее ступенчатое приложение номинальной нагрузки. Длительность каждого режима 1 секунды. Шаг интегрирования 0,001 с. При вводе нагрузки учитывается ее знак (вводится с минусом, т.к. направлена против направления вращения).
На рис. 8.2. представлена графическая форма вывода результатов. По результатам видно, что скорость холостого хода – 1090 об/мин, а переходные процессы не имеют колебательного характера. Из расчетов видно, что при прямом пуске (даже на холостом ходу), ток якоря на короткое время (около 0,1 с.) достигает 420 А, что почти в 10 раз превышает номинальное значение.
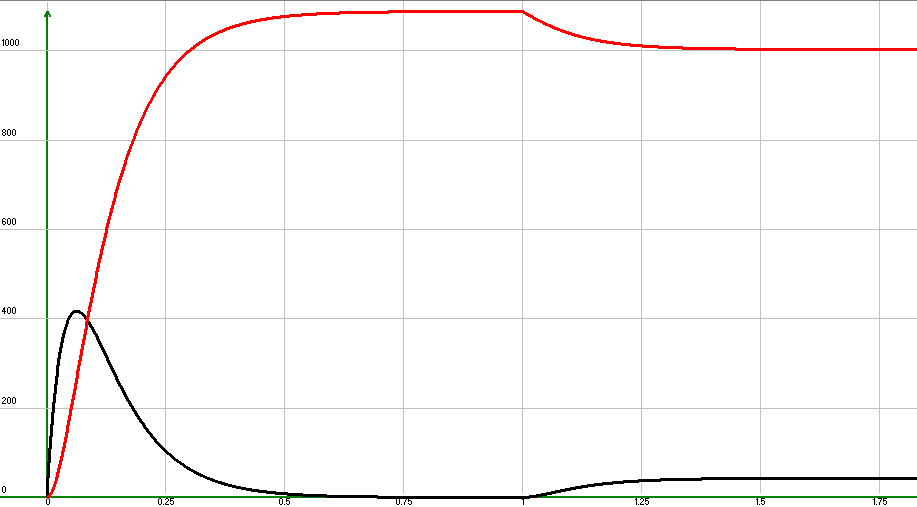
Рис. 8.2. Пример моделирования переходных процессов в ДПТ.
9. Моделирование двухконтурной системы тп-д.
Двухконтурные системы подчиненного регулирования широко применяют для управления скоростью ДПТ посредством изменения напряжения на якоре при постоянном потоке. Внутренний контур состоит из регулятора тока якоря, тиристорного выпрямителя, якорной цепи и датчика тока. Внешний контур, в зависимости от требований к приводу, к жесткости характеристик, – может быть реализован одним из трех вариантов: с обратной связью по частоте вращения (по скорости), с обратной связью по ЭДС двигателя и с обратной связью по напряжению.
Структурная схема системы с обратной связью по скорости и модель системы в программе АС 3.1 представлена на рис. 9.1.
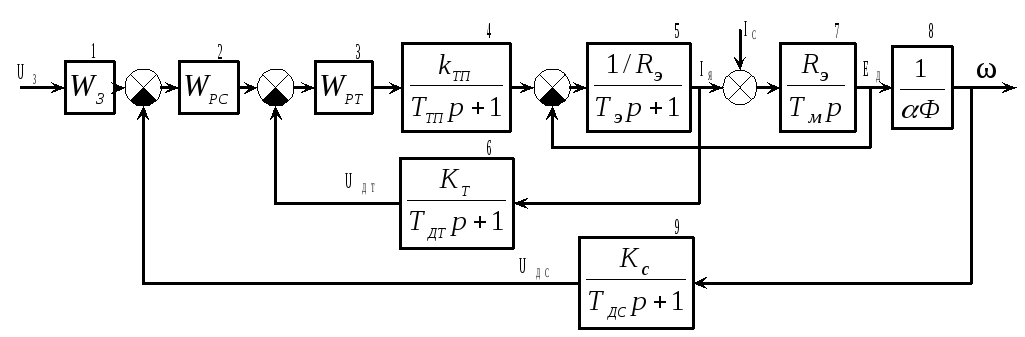
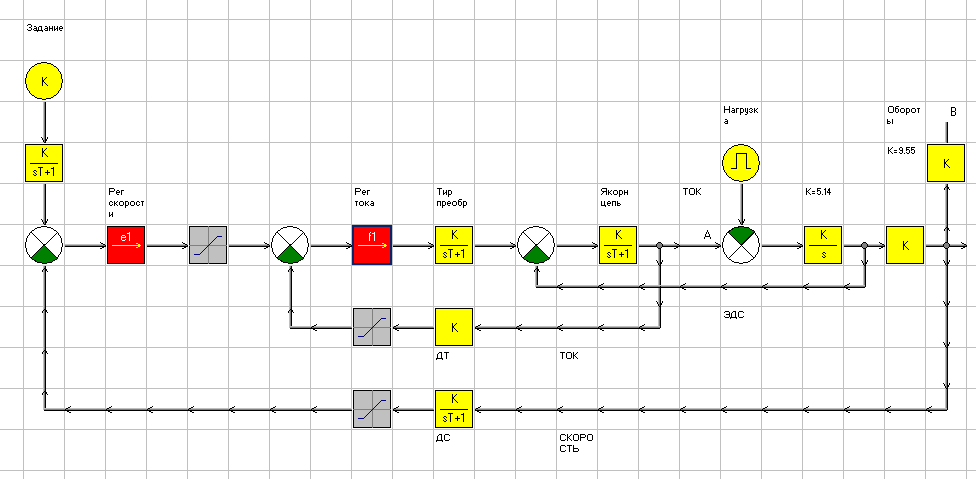
Рис.9.1 Пример моделирования двухконтурной системы с обратной связью по скорости.
Для расчета коэффициентов передачи и постоянных времени звеньев модели использованы справочные данные двигателя и преобразователя. Получены следующие параметры модели (примем Rтп=0.8Ra; Lтп=La):
Суммарное сопротивление якорной цепи Rэ = Rа+RТП = 1,8Rа = 0.72 Ом
Суммарная индуктивность Lэ = Lа+LТП = 1,6Lа = 0,024 Гн
Электромагнитная постоянная Тэ = Lэ/Rэ = 0,033 с
Электромеханическая постоянная Тм = JRэ/(αФ)2 = 0,25 с
Коэффициент тирист. преобразователя kТП = 28
Постоянная преобразователя ТТП = 0,01 с
Коэффициент обратной связи по току kТ = Uу/2,5Iн = 0,093
Коэффициент обратной связи по скорости kс = Uу/ωmax = 0,063
Максимальная частота вращения ωmax = nmax·2π/60 = 157 с-1
Постоянная времени в канале ОС по скорости ТДС = 0,03 с
Для расчета коэффициента преобразователя использовано соотношение:
![]() .
.
Максимальное напряжение тиристорного преобразователя UВпринято равным 280 В, а максимальное напряжение регулятора токаUу– 10 В. Постоянная преобразователя принята равной 0,01 с. (Здесь и далее унифицированный уровень напряжения принят равным 10 В; на этом уровне ограничены задающие напряжения и выходные напряжения датчиков и регуляторов. В действительности уровень ограничения напряжения для различных элементов системы может быть разным, что должно учитываться при расчетах параметров модели и вводе ограничений.
Будем считать обратную связь по току безынерционной, т.е. ТДТ=0. Коэффициент обратной связи по току рассчитан по формуле:
![]() .
.
Максимальная скорость вращения двигателя принята равной
1500
об/мин. Соответственно
![]() .
Тогда коэффициент обратной связи по
частоте вращенияkс
будет равен:
.
Тогда коэффициент обратной связи по
частоте вращенияkс
будет равен:
![]() .
.
Постоянная времени фильтра в канале обратной связи по скорости ТДС принята равной 0,03 с.
При
использовании ПИ-регулятора тока с
передаточной функцией
![]() и настройке контура на оптимум по модулю,
параметры регулятора тока будут
следующими:
и настройке контура на оптимум по модулю,
параметры регулятора тока будут
следующими:
ТРТ = Тэ = 0,033 с.
![]()
здесь В0 = 2ТТП = 0,02 с.
Таким образом, регулятор тока будет следующим:
![]()
Коэффициент пропорционального регулятора скорости при настройке контура частоты вращения на оптимум по модулю можно рассчитать по формуле:
![]()
здесь Bос = 2(2ТТП+ТДС) = 2(0,02 + 0,03) = 0,1 с.
Таким образом, рассмотрены все звенья модели, представленной на рис.9.1 (файл OSS1.sa и макрос mc_pirt1.sa).
Моделировались два последовательных режима: отработка задающего напряжения UЗ = 7 В на холостом ходу в течение 2 секунд и последующее ступенчатое приложение нагрузки -43 А. Длительность второго режима 1 с. Расчет проводился с шагом интегрирования 0,001 с.
Результат, выведенный на график, представлен на рис.9.2. Согласно графику, статическая просадка скорости при приложении нагрузки составила примерно 60 об/мин.
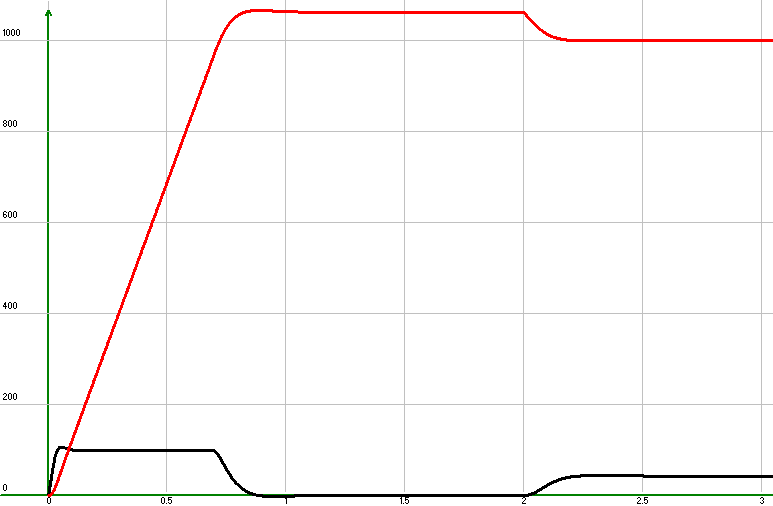
Рис. 9.2. Результаты моделирования двухконтурной системы с обратной связью по скорости с П-регулятором скорости.
Второй вариант расчета проводился для двухкратноинтегрирующей системы с ПИ-регулятором скорости и фильтром на входе регулятора. Коэффициент регулятора остается неизменным и равным 9.9. Постоянная регулятора при настройке контура на симметричный оптимум рассчитана по формуле:
ТРС = 4Тµс = 0,14 c.,
где
![]() с.
с.
![]()
В канал задания введен фильтр с такой же постоянной времени. Контур регулирования тока якоря не изменялся.
Результаты представлены на рис. 9.3. Основное отличие переходных процессов заключается в том, что задание отрабатывается с перерегулированием 4%, а скорость привода после приложения нагрузки восстанавливается, причем за короткое время (примерно 0,5 – 1 секунды). Система с П-регулятором скорости имеет более высокое быстродействие, чем система с ПИ-регулятором (OSS1_PI.sa с макросом mc_pirs1.sa).
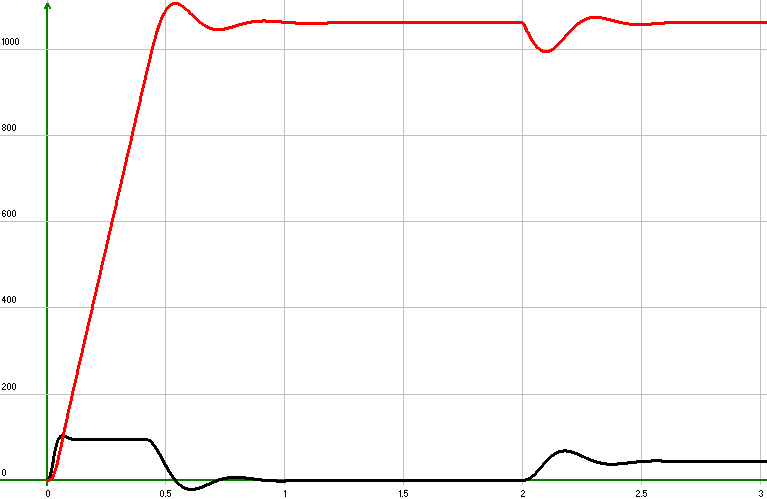
Рис. 9.3. Результаты моделирования двухконтурной системы с обратной связью по скорости с ПИ-регулятором скорости.