2. Линеаризация нелинейных моделей систем управления.
Для упрощения исследований САУ нелинейные дифференциальные уравнения во многих случаях можно приближенно заменить линейными. Процесс преобразования нелинейных уравнений в линейные называют линеаризацией.
Основой возможности линеаризации нелинейных уравнений является то, что в течение процесса управления происходят лишь достаточно малые отклонения всех величин от их установившихся значений. Этот метод получил название метода малых отклонений. Математической основой метода малых отклонений является разложение нелинейных функций в ряд Тейлора.
Если в системе имеются нелинейные звенья, то при исследовании системы и ее проектировании, ее линеаризуют, т.е заменяют линиями.
![]()
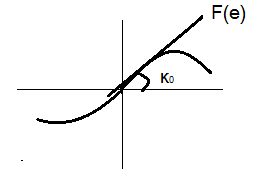
Различают нелинейные системы с линейными уравнениями:
Линеаризованные системы , где нелинейные звенья заменены линейными;
Существенно нелинейные системы, которые не поддаются линеаризации астатическим характеристикам, например, сигнатура.
Пространство состояний и фазовая траектория.
Обычно рисуют в n- мерном пространстве.
Пусть дано уравнение системы при n=2

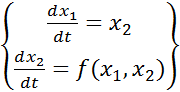
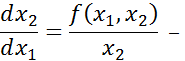
Поделим 2-ое уравнение на 1-ое.
![]()
![]()
![]()
Фазовый портрет- это семейство траекторий для разных начальных состояний.
Для
консервативного звена: ![]()