

ФОПИ _Чередов_1
.pdfФизические основы полученияинформации
Кратность изменения сопротивления – это отношение темнового сопро-
тивления к сопротивлению при определенной освещенности (как правило, 200 или 300 лк) n = RТЕМН /RЕ=200лк. Кратность для разных типов фоторезисторов лежит в пределах от единиц до сотен тысяч.
Темновое сопротивление RТЕМН – это сопротивление при ЕОПТ = 0. Сопротивление RТЕМН может иметь значение от 10 до 109 Ом.
Кратность может быть определена как отношение светового тока JСВ к темновому току JТЕМН (световой ток определяется, как правило, при освещенно-
сти 200 ±20 лк).
Световой ток – ток, протекающий через фоторезистор при рабочем напряжении и воздействии потока излучений заданной интенсивности.
Световая постоянная времени – это время, в течение которого сопротивление (фототок) фоторезистора изменяется при затемнении или при освещении в е раз по отношению к установившемуся значению.
Различают постоянные времени при затемнении СП и освещении Н фоторезистора. Значения постоянных времени СП, Н для разных типов фоторезисторов имеют значения от 10-8 с до 10-2 с.
Световая постоянная по спаду τсп – время, в течение которого световой ток уменьшается до значения 37 % от максимального при освещении фоторезистора в форме единичного импульса света.
Световая постоянная по нарастанию τн – время, в течение которого све-
товой ток увеличивается до 63 % от максимального при затемнении фоторезистора.
В табл. 4.5 представлены основные характеристики некоторых типов фоторезисторов [15].
|
|
|
|
|
|
Таблица 4.5 |
|
Тип |
UРАБ, B |
JСВ , мкА |
Jтемн, мкА |
τн, мкс |
τсп, мкс |
|
λmax, |
|
|
не более |
не более |
|
|
|
мкм |
СФ2-1 |
15 |
500 |
1 |
90 |
40 |
|
0,65 |
СФ2-12 |
15 |
200-1200 |
0,3 |
25 |
25 |
|
0,54±0,4 |
ФСК-1 |
50 |
1500 |
15 |
150 |
130 |
|
0,6 |
СФ3-1 |
15 |
750 |
0,5 |
20 |
60 |
|
0,79 |
СФ3-7Б |
1,5 |
1200 |
0,01 |
8 |
8 |
|
0,72 |
ФСД-1 |
20 |
1500 |
10 |
50 |
80 |
|
0,77 |
Погрешности фоторезистивных ПИП
Погрешности фоторезистивных ИП обусловлены следующими причинами: 1) нестабильностью свойств материала фоторезистора во времени; 2) изменением параметров и характеристик фоторезистора под действием температуры; 3) влиянием фоновой засветки.
~121 ~

Физические основы полученияинформации
При длительной эксплуатации фоторезисторов изменяются характеристики фоточувствительного слоя и необходима периодическая проверка и градуировка фоторезистивного ИП.
При изменении температуры фоторезистора изменяются его сопротивление, порог чувствительности (увеличивается с ростом температуры) и изменяются постоянные времени (с ростом температуры , как правило, уменьшаются). Для уменьшения этой погрешности фоторезисторы подвергают тренировке.
Погрешность, обусловленная фоновой засветкой, уменьшается применением специальных оптических фильтров.
4.4.5. Измерительные цепи резистивных ПИП
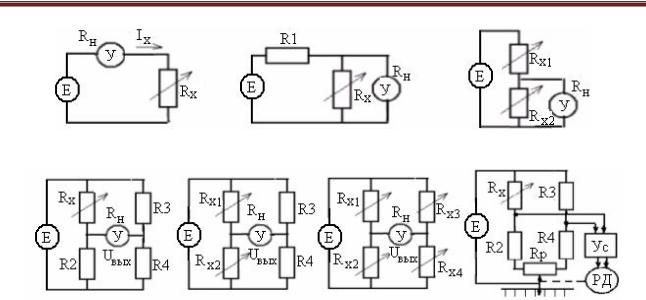
Для измерения выходного параметра резистивных ПИП – электрического сопротивления R – может быть использована любая цепь, предназначенная для измерения сопротивления. Наибольшее распространение находят следующие измерительные цепи [15]: 1) цепь последовательного включения преобразователя и измерительного прибора; 2) цепь резистивного делителя напряжения; 3) цепь неравновесного моста; 4) цепь автоматически уравновешиваемого моста; 5) частотно-зависимые цепи генераторов гармонических и релаксационных колебаний.
Цепь последовательного включения (рис. 4.16а) состоит из РИП RX и со-
противления нагрузки RH (например, амперметра). Выходной величиной измерительной цепи является ток. В общем случае сопротивление резистивного ПИП является функцией измеряемой величины Х и может быть записано в виде RX = R0 RX. Уравнение преобразования цепи будет
IX = E/[RН + R0 RX]. |
(4.44) |
Измерительная цепь последовательного включения характеризуется нелинейной зависимостью между IX и R(X). Погрешность линейности может быть уменьшена при работе на начальном участке характеристики IX = F( R).
Цепь резистивного делителя напряжения показана на рис. 4.16б. Уравне-
ние преобразования цепи имеет вид
UВЫХ |
|
ERH (R0 RX ) |
|
||||
|
|
|
|
, |
(4.45) |
||
(R R |
X |
)(R1 R |
) R1 |
||||
|
0 |
|
H |
|
|
|
|
где R1– сопротивление, ограничивающее ток в цепи.
В качестве нагрузки RН может быть использован вольтметр. Если сопротивление вольтметра RВ = RН RХ, получим
UВЫХ = E(R0 RX)/(R1+ R0 RХ). |
(4.46) |
~122 ~

Физические основы полученияинформации
Измерительные цепи последовательного включения и резистивного делителя напряжения характеризуются нелинейной зависимостью между выходной величиной ( IX, UX) и изменением RХ. Погрешность линейности уменьшается при работе на начальном участке характеристики преобразования. Эта погрешность также может быть уменьшена при включении в цепь делителя напряжения дифференциального преобразователя (рис. 4.16в). Полагая, что RX1 = R0/2 - RX; RX2 = R0/2 + RX и Rу RХ2, для цепи с дифференциальным преобразователем получим линейную зависимость UВЫХ от RX:
UВЫХ = E(R0 + 2 RX)/2R0. |
(4.47) |
Недостатком рассмотренных измерительных цепей является то, что нулевому значению измеряемой величины (Х = 0) соответствует ненулевое значение выходной величины (IX 0; UВЫХ 0). При измерении переменных величин этот недостаток устраняется использованием разделительных конденсаторов. Результирующие погрешности цепей последовательного включения и делителя напряжения зависят от погрешности преобразователя, погрешности от нестабильности параметров источника питания и нагрузки.
Рассмотренные измерительные цепи могут работать как на постоянном, так и на переменном токе.
Мостовые измерительные цепи выполняются в виде неравновесных и равновесных мостов. В неравновесных мостах (рис. 4.16г, д, е) в исходном состоянии осуществляется компенсация начального значения выходного сигнала так, чтобы при Х = 0 он был равен нулю. При отклонении измеряемой величины Х от нуля изменяется сопротивление RX = R0 + RX и мост выходит из состояния равновесия.
Выходное напряжение мостовой цепи (рис. 4.16г) определяется как
Uвых E |
|
|
RX R4 R2R3 RH |
|
. (4.48) |
RH |
(RX |
R2)(R3 R4) RX R2(R3 R4) R3 R4(RX |
|
||
|
R2) |
||||
Резистивные датчики могут быть включены в одно (рис. 4.17а), два (рис. 4.16д) и четыре (рис. 4.16е) плеча моста. Как видно из формулы (4.48), выходное напряжение моста при заданном напряжении питания Е в общем слу-
чае нелинейно зависит от RX для всех вариантов включения датчиков.
~123 ~
Физические основы полученияинформации
а |
б |
в |
г |
д |
е |
ж |
Рис. 4.16
При включении дифференциального преобразователя (рис. 4.16д), если начальные сопротивления RX1, RX2 равны R0 и равны R3, R4, т.е. RX1 = RX2 = R3 = R4 = R0 и RН >> R0, уравнение преобразования мостовой цепи будет линейным.
Выходное напряжение для равноплечего моста при RН R0 может быть определено по формулами: UВЫХ1 = E RX/4R0 (рис. 4.16г); UВЫХ2 = E RX /2R0 (рис. 4.16д); UВЫХ4 = E RX /R0 (рис. 4.16е), то есть выходное напряжение линейно зависит от изменения сопротивления RX.
К достоинствам мостовой цепи можно отнести возможность получения нулевого выходного сигнала при значении измеряемой величины, равной нулю.
Мостовые цепи работают как на постоянном, так и на переменном токе, причем питание может осуществляться как от источника напряжения, так и от источника тока.
На рис. 4.16ж показана цепь автоматически уравновешиваемого моста. При отсутствии входного сигнала мост уравновешен и движок реохорда Rр находится в определенном начальном положении. При изменении входного сигнала мостовая цепь выходит из состояния равновесия. Сигнал разбаланса усиливается усилителем Ус и поступает на вход реверсивного двигателя РД. Двигатель приходит во вращение и перемещает движок реохорда Rp до тех пор, пока не наступает новое состояние равновесия в мостовой цепи. Шкала указателя на валу двигателя и реохорда градуируется в единицах входной величины.
Основными причинами погрешностей мостовых цепей являются: временная и температурная нестабильность нерабочих плеч моста; нестабильность источника питания; погрешности ИП.
При малых величинах сопротивлений резистивных преобразователей (единицы и десятки ом) появляется погрешность из-за изменения сопротивления
~124 ~
Физические основы полученияинформации
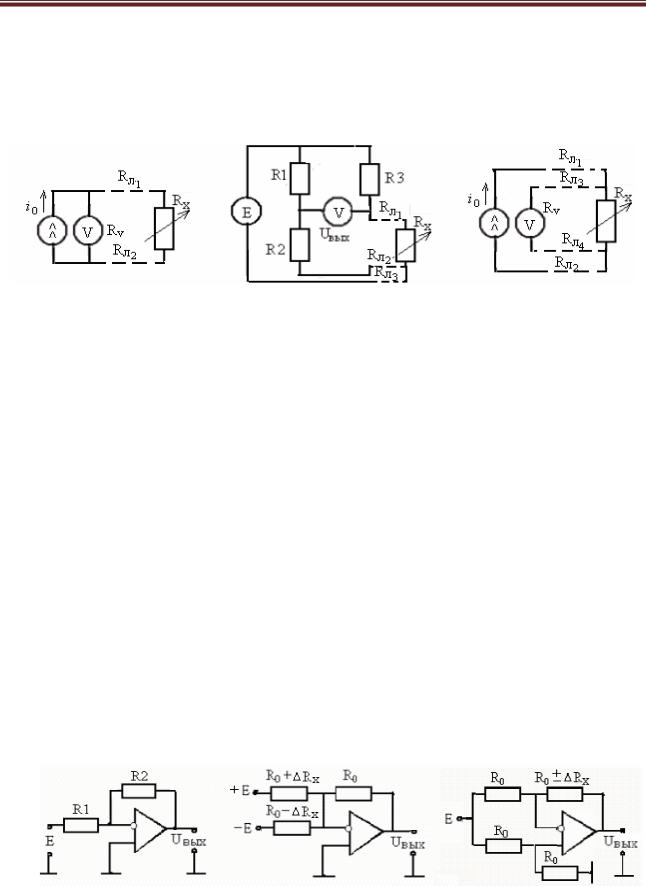
соединительных проводов под действием температуры. Для уменьшения этой погрешности применяют многопроводные линии связи, когда к резистивному преобразователю подводится больше двух проводов. На рис. 4.17 показаны примеры двухпроводной (рис. 4.17а), трехпроводной (рис. 4.17б) и четырехпроводной (рис. 4.17в) линий связи.
а |
б |
в |
|
Рис. 4.17 |
|
В схеме (рис. 4.17б) резистивный датчик Rх подключается к мостовой цепи так, чтобы два сопротивления соединительных линий Rл1 и Rл2 вошли в разные (соседние) плечи моста, а третье сопротивление линии Rл3 оказалось включенным последовательно с источником питания Е. При работе измерительной цепи в равновесном режиме метод дает полную компенсацию погрешности от изменения сопротивления линии. При работе в неравновесном режиме эта погрешность существенно меньше, чем в двухпроводной линии.
Падение напряжения на резистивном ПИП Rх (рис. 4.17) U = RХ i0 измеряется вольтметром с большим входным сопротивлением (Rv >> Rх, Rл3, Rл4) . При этом подключение резистивного ПИП с помощью четырех проводов обеспечивает практически полную независимость показаний от сопротивления линии.
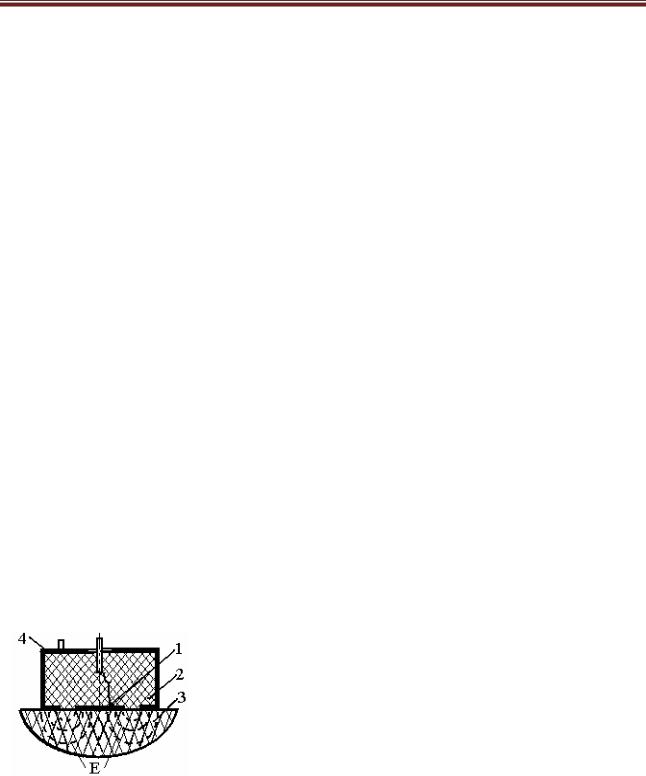
В настоящее время очень широкое применение находят измерительные цепи резистивных ИП, использующие операционные усилители. На рис. 4.18 приведены примеры схем преобразователей сопротивления в напряжение. Схема с двухпроводной линией связи (рис. 4.18а) применяется в тех случаях, когда измеряются большие сопротивления или когда резистивный ПИП находится в непосредственной близости от измерительной схемы. Для данной цепи выходное напряжение Uвых = -Е.R2/R1 [26]. Датчик может быть включен вместо любого из резисторов схемы.
а б в Рис. 4.18
~125 ~

Физические основы полученияинформации
Измерительная цепь, показанная на рис. 4.18б, может быть использована для дифференциальных резистивных датчиков. Выходное напряжение этой измерительной цепи может быть определено по формуле UВЫХ = 2Е. RХ/R0. На рис. 4.18в показана схема моста с ОУ. Уравнение преобразования измерительной цепи имеет вид UВЫХ = -2 RХ/(2R0) [27].
~126 ~
Физические основы полученияинформации
4.5. ЕМКОСТНЫЕ ПИП
Емкостные ИП (ЕИП) относятся к группе электростатических преобразователей, у которых входная измеряемая величина связана с изменением емкости системы или с величиной электрического заряда.
Действие емкостных преобразователей основано на преобразовании входной величины в изменение емкости конденсатора. Информативными выходными параметрами емкостных ИП могут быть электрическая емкость С и тангенс угла диэлектрических потерь tgδ, которые связаны с различными физикомеханическими свойствами объекта измерения (контроля): относительной диэлектрической проницаемостью εr, размерами и формой, плотностью, наличием и размерами нарушений сплошности (пустот, включений) и др.
4.5.1. Конструкции и основные характеристики емкостных датчиков
ЕИП в общем случае состоит из электродов, между которыми располагается диэлектрический материал, выводов и различных конструктивных элементов. Диэлектрик может находиться в жидком, твердом и газообразном состоянии. Электроды могут выполняться в виде прямоугольных, круговых, кольцеобразных пластин, коаксиальных цилиндров и других конструкций и форм. Конструктивные элементы – различные электроизоляционные материалы и элементы защиты конденсатора от внешних факторов.
По взаимному расположению объекта измерения и электродов ЕИП подразделяются на накладные и проходные преобразователи [12]. В накладных преобразователях электроды расположены с одной стороны объекта измерения,
впроходных – электроды охватывают объект с разных сторон.
Внакладных преобразователях электроды, которые представляют собой металлические пластины определенной формы, накладываются на поверхность объекта измерения. На рис. 4.19 показан пример расположения на объекте электродов накладного преобразователя с цилиндрически-
ми электродами. Электрическая емкость между электродами 1 и 4 зависит от размеров электродов, диэлектрической проницаемости окружающей среды ε1 (верхнего полупространства) и диэлектрической проницаемости объекта измерения ε2. Если толщина объ-
екта и размеры пространства над электродами значительно превышают глубину области, в которой действует поле электродов, то комплексная емкость С первичного преобразователя, учитывающая реактивную и активную составляющую тока между электродами, обусловленную активными потерями в диэлектрике, находится как
~127 ~

Физические основы полученияинформации
C C/ jC// |
0 |
l(A |
1 |
A |
2 |
), |
(4.49) |
|
1 |
2 |
|
|
где С/ и С// – действительная и мнимая составляющие комплексной емкости; l – длина электродов; А1 и А2 – геометрические коэффициенты, определяющие емкости окружающей и измеряемой среды.
В общем случае относительная диэлектрическая проницаемость ε содержит ε/ и мнимую ε// составляющие [12], т. е. ε = ε/ - j ε//.
Тангенс угла диэлектрических потерь определяется выражением
tgδ = ε//ε//. |
(4.50) |
Из (4.49) и (4.50) можно получить для объекта измерения следующие характеристики:
|
/ |
|
|
|
|
C/ |
|
|
|
|
1 |
|
A |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
1 |
; |
|
|
|
|
(4.51) |
|||
2 |
|
0 |
l A |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
A / |
|
|
A / |
|
|
. |
(4.52) |
||||||
tg |
|
tg 1 |
1 |
1 |
|
|
|
1 |
|
1 |
tg |
|
||||||||
|
A / |
A / |
|
|||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
2 |
2 |
|
|
|
2 |
|
2 |
|
|
|
|
||
Для объектов с плоскими и цилиндрическими поверхностями и воздушной окружающей среде А1 = А2 = А; 1/ 1 1, tgδ1 = 0.
Для многих диэлектриков диэлектрические потери очень малы и tgδ → 0 и можно считать, что емкость преобразователя С = С/, С// → 0.
Исключая влияние паразитных емкостей на результат измерения, можно записать выражения для определения εм = ε2 и tgδм = tgδ2 материала объекта измерения в виде
м (Сp С0 )/C0 1; |
(4.53) |
tg м (tg p tg 0 )(1 1/ м ), |
(4.54) |
где Ср и С0 – емкость преобразователя с объектом измерения и начальная емкость (без объекта) преобразователя; tgδр и tgδ0 – тангенс угла диэлектрических потерь преобразователя с объектом измерения и без объекта измерения.
По значению ε и tgδм можно судить о величинах, связанных с ними: составе, влажности, температуре объекта измерения и др.
Накладные преобразователи могут также применяться для измерения линейных размеров диэлектрических объектов.
На рис. 4.20 приведены конструкции и схемы измерения толщины диэлектрического и электропроводящего объектов с помощью накладных ЕИП.
При выполнении электродов 1 и 2 (рис. 4.20а) в виде плоских металлических пластин, емкость преобразователя с диэлектрическим объектом, находящимся в зазоре между электродами, может быть найдена по формуле [15]
~128 ~

Физические основы полученияинформации
C |
r 0 S |
, |
(4.55) |
d (1 ) h |
|||
где εr – относительная диэлектрическая проницаемость объекта |
измерения; |
||
S – площадь электродов. |
|
|
|
Подобные преобразователи позволяют измерять толщину различных объектов (например, картона) в процессе производства с разрешающей способностью 1 мкм [12].
а б 1 и 2 – электроды; 3 – экранирующий корпус; 4 – объект измерения
Рис. 4.20
На рис. 4.20б показана схема толщины h плоского электропроводящего объекта с помощью двух накладных ЕИП. В ЕИП роль одного из электродов выполняет объект измерения. Измерив значения емкостей С1 и С2, можно определить значения зазоров d1 и d2 и затем толщину h объекта:
h = d – (d1 + d2). |
(4.56) |
Проходные преобразователи имеют разнообразные конструкции и применяются для контроля линейных размеров как диэлектрических, так и электропроводящих объектов.
Измерение (контроль) электропроводящих объектов основано на использовании зависимости электрической емкости системы запряженных проводящих электродов, включающей объект измерения, от размеров поперечного сечения объекта измерения. Одним из электродов может служить электропроводящий объект.
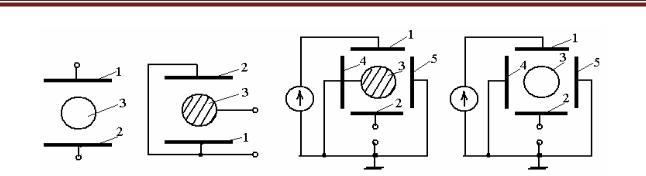
Примеры схем расположения электродов проходных емкостных датчиков показаны на рис. 4.21 [12].
Схемы на рис. 4.21б, в применимы только для электропроводящих объектов, схемы на рис. 4.21а, г – для любых [15]. Для уменьшения полей рассеяния используются дополнительные охранные электроды, при этом уменьшаются погрешности измерения.
~129 ~
Физические основы полученияинформации
а |
б |
в |
г |
1, 2 – электроды; 3 |
– объект измерения; 4, 5 – охранные электроды |
||
|
|
Рис. 4.21 |
|
Диапазон измерения толщины составляет от единиц микрометров до единиц миллиметров. Погрешность составляет значение от десятых долей до единиц процентов.
ЕИП широко применяются для измерения влажности различных твердых и сыпучих материалов. От влажности зависит значение относительной диэлектрической проницаемости материала. Преобразователи имеют различные конструкции в зависимости от контролируемого объекта. Диапазон измерения достигает 80 %. Погрешность измерения составляет от десятых долей до единиц процентов.
Широкое применение ЕИП получили для измерения линейных и угловых перемещений.
Наиболее часто используются две конструкции емкостных ПИП. Первая представляет собой конденсатор с плоскими параллельными электродами
(рис. 4.22а), емкость которого, если пренебречь краевыми эффектами:
C 0S / x, |
(4.57) |
где S – площадь перекрытия электродов.
Вторая конструкция представляет собой цилиндрический конденсатор (рис. 4.22д), емкость которого находится как
C(х) |
2 0 x |
, |
(4.58) |
|
|||
|
ln(D/ d) |
|
|
где D – диаметр внешнего цилиндрического электрода; d – диаметр внутреннего цилиндрического электрода; х – длина перекрытия обоих электродов.
В основу принципа действия ЕИП перемещения могут быть положены: 1) изменение расстояния между электродами; 2) изменение площади перекрытия электродов; 3) изменение диэлектрической проницаемости диэлектрика между электродами или части его.
~130 ~