

stanok 20.12.13 вечер
.docxКинематический анализ вертикально-сверлильного станка модели
2А150
Наиболее распространенный универсальный одношпиндельный вертикально-сверлильный станок (рис. 1) предназначен для работы в основных производственных цехах, а также в условиях индивидуального и мелкосерийного производства, в ремонтно-механических и индустриальных цехах.
Техническая характеристика:
наибольший диаметр сверления 50 мм;
число скоростей шпинделя 12;
пределы чисел оборотов 31—1350 об/мин;
число подач — 9;
пределы величин подач 0,106 —2,25 мм/мин;
мощность электродвигателя N = 7 квт.
На
фундаментной плите 1
смонтирована
колонна 2
коробчатой
формы. В ее верхней части размещена
шпиндельная головка 3,
несущая
электродвигатель 4,
шпиндель
5
с
инструментом 6.
На
вертикальных направляющих колонны
установлена шпиндельная бабка 7, внутри
которой размещен механизм подачи,
осуществляющий вертикальное
перемещение шпинделя. Поднимать и
опускать шпиндель можно механически
и вручную с помощью штурвала 8.
Для
установки заготовок и приспособлений
имеется стол
9,
который
может перемещаться по направляющим
колонны в зависимости от размеров
деталей, подвергающихся обработке.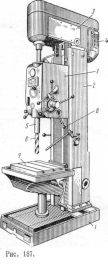
Изменение чисел оборотов шпинделя осуществляется с помощью коробки скоростей. Приемный вал I коробки скоростей получает вращение от электродвигателя 46 через ременную передачу 1—2. Движение валу II сообщает одна из четырех пар зубчатых колес 3—4, 5—6, 7—8, 9—10. Затем движение передается валу III зубчатой парой 11—12 и далее шпинделю по одной из трех кинематических цепей: 12—15, 16—17 или 13-14, 16-17, или 13-14,18-19. Колеса 17 и 19 вращают втулку 20, а вместе с ней и шпиндель V. Последний связан со втулкой шлицевым соединением. В итоге шпиндель имеет 12 различных скоростей. Реверсирование шпинделя, необходимое при производстве резьбонарезных работ, осуществляется переключением электродвигателя.
Рабочая подача шпинделя производится с помощью реечной передачи. Реечное колесо 41 находится в зацеплении с рейкой пиноли 43. При вращении колеса пиноль получает вертикальное перемещение вместе со шпинделем. Станок имеет девять подач, осуществляемых от шпинделя через цилиндрические зубчатые колеса 21—22, 23—24 и коробку подач.
Вращение валу VIII сообщает одна из трех передач 25 —26,
27—28 или 29—30 и далее вал X — одна из трех цепей зубчатых колес 30—31, 32—33 или 30 —31, 31—34, или 44 —35, 31—34. Зубчатые передачи 36—37 и червячная пара 40—42 сообщают вращение реечному колесу 41.
Кинематическое уравнение главного движения имеет вид.
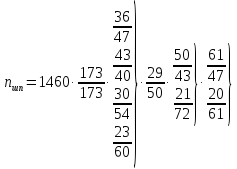
Z=4∙2∙2=16
Произведем расчет всех имеющихся передаточных соотношений.

















Из расчетов видно что несколько частот вращения повторяются. Таким образом в результате мы получаем 12 различных частот вращения шпинделя.
Построение графика частот оборотов.
Рассчитывается теоретический ряд частот вращения. Для этого находится знаменатель геометрического ряда:
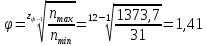
где Zф - фактическое число ступеней (берётся из паспорта);
nтах - максимальная частота вращения;
nтin - минимальная частота вращения.
По данному знаменателю строится теоретический ряд частот (12 значений), а также по результатам расчёта с помощью уравнения главного движения рассчитывается фактический, вычисляются отклонения, наибольшее из них сравнивается с допускаемым и делается вывод о соответствии друг другу двух рассчитанных рядов.
Теоретический ряд частот оборотов рассчитывается по принятому из стандартного ряда (1,06; 1,12; 1,26; 1,41; 1,58; 1,78; 2) знаменателю φ:
nz = n1 φz-1;
n1 = nmin;
n2 = n1 φ=31*(1,41)= 43,71;
n3 = n2 φ = n1 φ2=31*(1,41)2=61,6311;
n4 = n1 φ3=31*(1,41)3=86,8998;
n5 = n1 φ4=31*(1,41)4=122,5287;
n6 = n1 φ5=31*(1,41)5=172,7655;
n7 = n1 φ6=31*(1,41)6=243,599;
n8 = n1 φ7=31*(1,41)7=343,4752;
n9 = n1 φ8=31*(1,41)8=484,3;
n10 = n1 φ9=31*(1,41)9=682,8631;
n11 = n1 φ10=31*(1,41)10=962,8371;
n12 = n1 φ11=31*(1,41)11=1357,6.
Определяется наибольшее значение отклонения от фактического ряда по отношению к теоретическому

Вычисляем допустимое отклонение для данного φ:

Теоретический и фактический ряды соответственно, а также отклонения в %:
|
nт |
nф |
∆n |
||||||||||||||||||||||||||||||||||||
|
|
|
Сравнивая полученные отклонения и наибольшее из них с допускаемым, можно сделать вывод о том, что они находятся в допустимых пределах.
Построение графика частот оборотов .
На нулевой вал электромотора наносим логарифмическую шкалу с масштабом, обеспечивающим наиболее легкое восприятие графика. На каждый вал наносим рассчитанные частоты оборотов. На линиях соединения наносим передаточные отношения передачи. График частот оборотов для станка 2А150 показан в графической документации.
Построение лучевой диаграммы скоростей.
Лучевая диаграмма представляет собой зависимость скорости резания от диаметра заготовки или диаметра инструмента. Аналитическая зависимость выражается формулой:

Лучевая диаграмма служит для быстрого определения частоты вращения по заданной скорости и диаметру, а также для определения скорости по заданной частоте и диаметру. Обозначим диапазоны изменения диаметров.
Dmin=10мм. Dmax=400мм.
Механизм подач.
Рабочая подача шпинделя производится с помощью реечной передачи. Реечное колесо 41 находится в зацеплении с рейкой пиноли 43. При вращении колеса пиноль получает вертикальное перемещение вместе со шпинделем. Станок имеет девять подач, осуществляемых от шпинделя через цилиндрические зубчатые колеса 21—22, 23—24 и коробку подач.
Вращение валу VIII сообщает одна из трех передач 25 —26,
27—28 или 29—30 и далее вал X — одна из трех цепей зубчатых колес 30—31, 32—33 или 30 —31, 31—34, или 44 —35, 31—34. Зубчатые передачи 36—37 и червячная пара 40—42 сообщают вращение реечному колесу 41.
Кинематическое уравнение цепи подач имеет вид
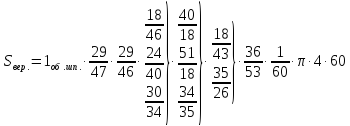
Определяем знаменатель геометрического ряда:
Вспомогательные движения.
Коробки скоростей и подач, шпиндель и механизм подач смонтированы внутри сверлильной головки, имеющей возможность перемещаться вдоль колонны при вращении соответствующей рукоятки через червячную и реечную пары. Вертикальное перемещение стола производят также вручную поворотом рукоятки через коническую и винтовую пары.

