

4. Методы распознавания в технической диагностике
4.1. Основные понятия
В общем случае задача распознавания диагнозов формулируется следующим образом [2, 3, 26].
Технический объект (система) может находиться в n состояниях, то есть для этого объекта может наблюдаться совокупность диагнозов D = (D1, D2,..., Di ,..., Dn), где i = 1...n.
Каждое техническое состояние (диагноз Di) описывается комплексом признаков K = (K1, K2,..., Kj,..., KL), где j = 1...L. Каждый j-й признак обладает mj разрядами.
Требуется построить решающее правило, с помощью которого объект, предъявленный для диагностики технического состояния, по полученному комплексу mj - разрядных признаков мог быть отнесен к одному из возможных диагнозов Di.
Для наглядности описания задач распознавания диагнозов удобно дать им геометрическую интерпретацию. При этом учтем, что в зависимости от свойств объекта диагностики, законов изменения параметров технического состояния, законов изменения диагностических параметров и, следовательно, диагностических признаков существуют два подхода к решению задач распознавания диагнозов: детерминистский и вероятностный.
Детерминистский подход имеет место в том случае, если каждый диагноз может быть описан конкретным набором диагностических признаков, которые принимают строго определенные значения. При этом этот набор значений признаков имеет место только для данного диагноза. С детерминистскими методами мы уже сталкивались на примере составления таблицы состояния.
Дадим геометрическую интерпретацию задачам распознавания диагнозов для детерминистского подхода. Пусть в результате оценки технического состояния определены конкретные значения диагностических признаков, то есть получено, что объект диагностирования характеризуется комплексом признаков K = (K1, K2,..., Kj,..., KL). Пусть признак Kj определяет значение j-й координаты некоторого вектора в L-мерном пространстве. Тогда набор признаков (K1, K2,..., Kj,..., KL) определяет вектор, соединяющий начало координат и точку с соответствующими координатами в L-мерном пространстве. При таком представлении каждому диагнозу будет соответствовать строго определенная точка в L-мерном пространстве признаков. Предыдущие рассуждения будут справедливы и для случая, если в качестве координат L-мерного пространства использовать понятие «диагностический параметр». Поэтому описания диагнозов в L-мерном пространстве диагностических признаков или диагностических параметров эквивалентны.
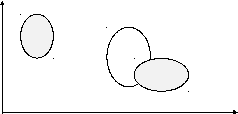
Отметим, что поскольку практически значения параметров получаются с учетом погрешностей измерений, то для каждого диагноза как в пространстве параметров, так и в пространстве признаков мы будем иметь не точку, а некоторую область. Но главной особенностью детерминистской постановки задачи является то, что области различных диагнозов не пересекаются. Например, на рис.4.1 изображен случай (сплошные линии), когда объект диагностики может находиться в двух диагнозах D1 и D2, а его техническое состояние описывается двумя признаками (параметрами) K1 и K2.
K2
D1
D1
D2
K1
Рис.4.1. Представление областей диагнозов
в пространстве признаков
Таким образом, при детермимистком подходе задача разработки решающего правила сводится к разделению пространства признаков (или параметров) на области диагнозов.
При детерминистском подходе для описания постановки диагностической задачи можно воспользоваться понятиями теории вероятностей. В случае перехода к понятиям теории вероятностей трактовка будет следующей. Если мы имеем набор признаков, принявших определенное значение, то вероятность диагноза, в область которого попала точка, определенная этим набором признаков, равна единице.
Такая трактовка предполагает, что и каждый признак принимает конкретное значение только при одном диагнозе. При других диагнозах он принимает другое значение.
К сожалению, детерминистская постановка диагностической задачи зачастую невозможна, так как на диагностические параметры (а следовательно, и на сформированные на их основе диагностические признаки) воздействует огромное количество случайных факторов (изготовление элементов систем в пределах допусков, внешние условия работы, точность измерения и т.п.). В результате диагностические признаки (параметры) имеют существенный разброс значений даже для случая, когда объекты находятся в одном и том же диагнозе. Поскольку диагностический признак обладает существенным разбросом, то он становится величиной, которая только с некоторой вероятностью определяет появление конкретного диагноза.
В такой ситуации используется вероятностный подход к решению задач технической диагностики. При использовании вероятностных методов постановка задач распознавания диагнозов формулируется следующим образом.
1. Имеется технический объект, который может находиться в одном из n диагнозов D = (D1, D2,..., Di ,..., Dn). Появление конкретного диагноза Di в данный момент времени случайно и определяется соответствующей вероятностью P(Di).
2. Известна совокупность признаков K = (K1, K2,..., Kj,..., KL), каждый из которых является случайной величиной и возможность его появления характеризуется вероятностью P(Kj).
3.Требуется сформулировать правило, с помощью которого можно по заданному комплексу признаков отнести объект к одному из диагнозов. То есть определить вероятность нахождения объекта в i-м диагнозе (появления события Di) при условии, что экспериментально получен конкретный набор значений признаков K* = (K*1, K*2,…, K*j,…, K*L), где K*j - конкретная реализация случайной величины Kj.
В геометрической интерпретации ситуация, соответствующая вероятностному подходу означает, что области диагнозов пересекаются, как это показано на рис.4.1 пунктирной линией для диагноза D1 .
Вероятностные методы распознавания являются более общими. Поэтому ниже подробно рассмотрены наиболее широко используемые методы, относящиеся к этому классу.