

Lektsii_El_privod
.pdfРис.6.6. Механические характеристики двухскоростного
асинхронного двигателя при пуске и торможении.
При ступенчатом торможении путем изменения числа пар полюсов с на
2 |
АД сначала переходит на работу по характеристике 2, при которой он |
|||||
тормозится до угловой скорости |
|
с отдачей энергии |
||||
в сеть. Потери на этом этапе ( при |
|
= -1, |
=0) |
|||
|
W |
J 2 |
/ 2 J 2 |
/ 8. |
|
(6.41) |
|
2c1 |
02 |
01 |
|
|
|
На следующем этапе путем изменения чередования фаз при том же числе
пар |
полюсов |
осуществляется |
торможение |
противовключением |
||
(характеристика 4), при котором ( |
= 2, |
= 1) потери составят |
||||
|
W |
3J 2 |
3J 2 / 8. |
|
(6.42) |
|
|
2c2 |
01 |
01 |
|
|
|
Суммарные потери при ступенчатом торможении
W |
W |
W |
J 2 |
/ 2, |
(6.43) |
2c |
2c1 |
2c2 |
01 |
|
|
т.е. при ступенчатом торможении потери в три раза меньше, чем при прямом торможении. Пропорционально этому снижаются потери в статоре и суммарные потери в АД.
Можно показать, что и при динамическом торможении в две ступени потери энергии уменьшатся в 2 раза [12].
Следует иметь в виду, что момент инерции многоскоростного двигателя значительно выше момента инерции односкоростного двигателя с той же мощностью и номинальной частотой вращения, поэтому замена односкоростного двигателя многоскоростным только для уменьшения потерь энергии представляется нецелесообразной. Можно говорить только о сравнении прямого и ступенчатого пуска для одного и того же многоскоростного асинхронного двигателя.
Еще более эффективным путем снижения потерь является непрерывное управление угловой скоростью идеального холостого хода путем изменения частоты питающего АД напряжения в системе ППЧ - АД.
Представим переходный процесс пуска АД вхолостую при изменении частоты напряжения на статоре так, чтобы сформировать закон изменения скорости идеального холостого хода в виде :
|
0 |
(t) 0 |
нач |
t |
при |
0 |
0ном ; |
(6.44) |
|
|
0 |
(t) 0 |
|
|
при |
0 |
0ном , |
||
|
ном |
|
|
||||||
где |
- ускорение электропривода, обеспечивающее заданное время |
||||||||
переходного процесса |
|
= J |
/М при постоянном моменте двигателя М, |
||||||
= d |
/dt |
= |
/ |
. |
|
|
|
|
|
На рис.6.7 показаны графики переходных характеристик при частотном пуске АД вхолостую.

При постоянном моменте М, выбранном исходя из допустимого ускорения или по перегрузочной способности двигателя или преобразователя, такое управление обеспечивает в меди ротора потери энергии:
W |
M |
|
|
|
J 2 |
|
2 |
0нач |
|
|
t |
|
0 |
|
|
. |
(6.45) |
||||
п.п |
|
|
|
|
||||||
2M |
|
0нач |
|
2 |
|
0ном |
|
|||
|
|
|
|
|
|
|
||||
Эти потери по сравнению с прямым пуском снижаются пропорционально 2
0нач / 0ном
Рис. 6.7. Переходные характеристики при частотном пуске асинхронного двигателя вхолостую.
В зависимости от мощности и типа двигателя потери могут уменьшиться в
5 - 10 раз.
При определении полных потерь энергии за время переходного процесса асинхронного двигателя необходимо учитывать, что к переменным потерям относятся и потери в меди статора. С учетом (6.32) потери энергии в меди АД (переменные потери)
составят
|
|
|
|
|
J |
2 |
|
|
|
|
|
|
R |
t |
п.п |
|
|||
W |
|
|
|
0 |
(s 2 |
s 2 |
) 1 |
1 |
|
|
|
|
|||||||
M |
2 |
|
R |
|
|
|
|
||||||||||||
|
|
|
|
|
нач |
|
кон |
|
|
t |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
п.п0 |
(6.46) |
|||
|
J 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
R |
|
M |
|
|
|
|
||||||||
|
|
|
0 |
(s 2 |
s 2 |
) 1 |
|
1 |
|
|
|
|
|
|
|
, |
|
||
|
|
|
R |
M M |
|
|
|||||||||||||
|
|
2 |
|
|
нач |
|
кон |
|
|
|
c |
|
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
а суммарные потери в двигателе с учетом |
постоянных потерь составят |
|
W в WM |
( Pc Pмех )tп.п . |
(6.47) |
Выражения (6.46) и (6.47) |
оценочные, так как получены при определенных |
|
допущениях. С их помощью можно при проектировании и модернизации асинхронного электропривода выбирать такие технические решения,
благодаря которым можно обеспечить минимизацию потерь энергии при переходных режимах работы электропривода.
Глава 7.
Подбор двигателей к рабочим машинам и
тепловые режимы двигателей
7.1. Общие сведения
Правильный выбор мощности двигателей во многом определяет первоначальные затраты и стоимость эксплуатационных расходов в электроприводах. Применение двигателя недостаточной мощности может привести к нарушению нормальной работы механизма, к снижению его производительности, возникновению аварий и преждевременному выходу двигателя из строя. В свою очередь использование двигателей завышенной мощности ухудшает экономические показатели установки, ведет к ее удорожанию и большим потерям энергии. В этом случае не только повышается первоначальная стоимость электропривода, но увеличиваются и потери энергии за счет снижения КПД двигателя, а в установках переменного тока, кроме того, ухудшается коэффициент мощности, значение которого непосредственно влияет на непроизводительную загрузку распределительных сетей и генераторов электрических станций,
производящих энергию. Весомость вопроса становится понятным, если представить, какое огромное число механизмов приводится электрическими двигателями во всех областях хозяйственной деятельности.
Мощность электродвигателя выбирается, исходя из необходимости обеспечить выполнение заданной работы электропривода, при соблюдении нормального теплового режима и допустимой механической перегрузки
двигателя.
Выбор мощности электродвигателей требует также расчета нагрузки привода не только при установившейся работе, но и в периоды переходных режимов. С этой целью обычно строятся так называемые нагрузочные диаграммы, под которыми понимаются зависимости вращающего момента,
мощности и тока двигателя от времени, т. е.
М = f(t) ; Р = f(t) и I = f (t) .
В каждом случае двигатель, выбранный в соответствии с заданной нагрузочной диаграммой, должен быть полностью загружен и при этом работать без перегрева сверх допустимых пределов. Аналогичным образом он должен обеспечивать нормальную работу при возможных временных перегрузках и обладать достаточным пусковым моментом для обеспечения требуемой длительности пуска рабочего механизма.
7.2.Нагрев и охлаждение двигателя
Вподавляющем числе случаев мощность двигателя выбирают по нагреву,
азатем его проверяют по перегрузочной способности, как показано ниже.
Нагревание двигателя происходит за счет потерь, возникающих в нем при преобразовании электрической энергии в механическую.
Потери энергии в стали, меди и потери на трение вызывают нагревание различных частей машины; при этом происходит также взаимное нагревание отдельных частей машины. Эти потери могут быть записаны в общем виде одним из следующих равенств:
|
P P |
P |
P (1 ) k v |
x2 |
v |
(a x2 ), |
(7.1) |
|
|
1 |
2 |
1 |
í |
|
í |
|
|
где |
и |
соответственно мощность, подведенная к двигателю, и |
||||||
мощность на его валу; |
|
|
|
|
|
|||
- КПД; k - |
постоянные потери (в стали, подшипниках и вентиляционные), |
||
практически не зависящие от нагрузки; |
- переменные потери (потери в |
||
меди) при номинальной нагрузке; а = k/ |
- коэффициент постоянных потерь; |
||
х = |
/ |
номинальная мощность двигателя. |
|
Вследствие выделения теплоты при нагрузке температура двигателя
постепенно повышается, и если бы двигатель не отдавал теплоту в окружающую среду, она могла бы достигнуть бесконечно большого значения. Однако рассеивание теплоты поверхностью двигателя в окружающую среду, все увеличивающееся с возрастанием температуры двигателя, ограничивает его нагрев, и повышение температуры по истечении некоторого времени прекращается. Происходит это тогда, когда количество теплоты, отдаваемой двигателем в окружающую среду в единицу времени,
становится равным количеству теплоты, выделяемой в двигателе за то же время. Такой тепловой режим, при котором достигается постоянство температуры (установившаяся температура), получается при длительной работе двигателя. Во многих случаях работа прекращается раньше, чем будет достигнута, установившаяся температура, или происходит снижение нагрузки, а следовательно, уменьшение потерь и снижение температуры двигателя.
В соответствии с этим при выборе мощности двигателя по условиям нагревания различают четыре основных стандартных режима работы: S1-
продолжительный, S2 - кратковременный, S3 – повторно-
кратковременный и S6 – перемежающийся и дополнительные:
S4 - повторно-кратковременный с частыми пусками, S5- повторно-
кратковременный с частыми пусками и электрическим торможением, S7 -
перемежающийся с частыми реверсами и S8 - перемежающийся с изменением частоты вращения [17]. Условное обозначение режима работы проставляется на паспортном щитке двигателя.
Про олжительный режим работы. В этом режиме рабочий период столь велик, что температура двигателя достигает своего установившегося значения. В качестве примеров здесь могут служить длительно работающие двигатели вентиляторов, насосов, и т. п., где продолжительность работы измеряются часами или даже сутками. Упрощенный график работы для этого режима приведен на рис. 7.1.
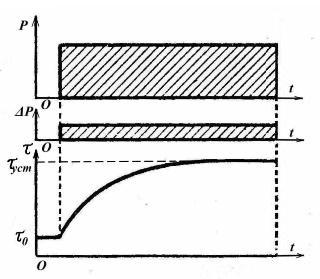
Рис.7.1. Продолжительный режим работы электродвигателя (графики
изменения: мощности Р; потерь мощности - Р; превышения
температуры - ).
Кратковременный режим работы характерен тем, что в рабочий период температура двигателя не успевает достигнуть установившегося значения, а
пауза столь длительна, что температура двигателя снижается до температуры окружающей среды. Для кратковременного нагрузочного режима работы
S2 помимо мощности указывают и предельную продолжительность работы с этой мощностью. Электродвигатели режима S2 выпускают на стандартные продолжительности работы10, 30, 60 и 90 мин. Такой режим встречается,
например, в приводах задвижек кормодробилок, и др., где пауза в работе значительно превышает длительность рабочего периода. Упрощенный график нагрузки такого режима приведен на рис.7.2 .

Рис.7.2. Кратковременный режим работы электродвигателя (графики
изменения: мощности – Р; потерь мощности – Р;
превышения температуры - )
Повторно-кратковременный режим работы SЗ. При этом режиме ни в
одном из периодов работы температура двигателя не достигает установившегося значения, а во время паузы двигатель не успевает охладиться до температуры окружающей среды. Типичный пример для подобных приводов - приводы конвейеров, дробилок, центрифуг и др.
Упрощенный график нагрузки |
такого режима показан на рис.7.3. |
|
Повторно-кратковременный |
режим |
работы характеризуется |
коэффициентом относительной продолжительности рабочего периода, под которым понимается отношение продолжительности рабочего периода к продолжительности рабочего цикла (суммарной продолжительности рабочего периода и паузы).
|
|
ПВ% = 100 |
/ |
|
|
(7.2) |
где |
, |
- продолжительности соответственно работы и одного цикла |
||||
при t |
, |
10 мин. , |
= |
+ |
, ( |
- |
продолжительность отключения двигателя. |
|
|
||||
Режимы работы двигателя ЭП повторно-кратковременный с частыми |
||||||
пусками S4 и повторно-кратковременный |
с частыми пусками и |
|||||

электрическим торможением S5 помимо значений мощности и ПВ еще характеризуются допускаемой частотой включений в час h со стандартными значениями 30, 60, 120 и 240 при оговоренном коэффициенте инерции ЭП FJ со стандартными значениями 1,2; 1,6; 2,5 и 4. Стандартные значения ПВ: 15, 25, 40 и 60 %.
Рис.7.3. |
Повторно-кратковременный режим |
работы электродвигателя |
|||
(графики изменения: мощности – Р; потерь мощности - |
Р; |
||||
превышения температуры - ). |
|
|
|
||
Электродвигатели перемежающегося режима |
S6 (рис.7.4) наряду с |
||||
номинальной мощностью характеризуются номинальным значением |
|||||
продолжительности нагрузки (ПН): |
|
|
|||
|
|
ПН% = 100 |
/ |
|
(7.3) |
где |
, |
- продолжительности работы, холостого хода и |
|||
одного цикла при t =10 мин. |
|
|
|
||
Стандартные значения ПН: 15, 25, 40 и 60 %. |
|
|
|||
Для режима перемежающегося с частыми реверсами |
S7 дополнительно |
||||
указывают число реверсов в час (стандартные значения 30, 60, 120 и 240
рев/ч при FJ =1,2; 1,6; 2,5 и 4), а для перемежающегося режима с изменением частоты вращения S8 - продолжительность

работы с разной частотой вращения.
Рис.7.4. Перемежающийся режим работы электродвигателя (графики изменения: мощности – Р; потерь мощности – Р;
превышения температуры - ).
Методы выбора мощности двигателей для каждого из трех основных указанных режимов работы несколько различаются, поскольку условия нагревания машин для них различны. Решение задачи осложняется еще и тем, что графики нагрузки в таком виде, как они представлены на рис. 7.1…7.3, в практических случаях не встречаются.
Обычно механизмы работают при непрерывно изменяющейся нагрузке,
как это бывает, например, у дробилок, конвейеров и т. п. На основании общей теории нагрева двигателей удается получить удовлетворительную методику расчета мощности двигателей для различных случаев.
Допустимое нагревание двигателей определяется нагревостойкостью применяемых изоляционных материалов. Более нагревостойкие материалы изоляции позволяют при тех же размерах двигателя увеличивать его мощность. Лучшее использование двигателя может быть достигнуто также за счет применения более совершенной системы его охлаждения.