

7.4. Power Electronics - устройства силовой электроники
В библиотеке устройств силовой электроники (рис. 7.4) находятся модели полупроводниковых приборов (диод, тиристор, запираемый тиристор, IGBT и MOSFET транзисторы), а также универсальный мост, позволяющий моделировать одно-, двух -, и трехфазные выпрямительные или инверторные схемы. Кроме того, в библиотеке присутствует модель трехуровнего моста и модель идеального ключа.
Каждый единичный полупроводниковый элемент содержит выход т, на котором с помощью измерительных приборов можно посмотреть форму напряжения и тока на элементе и измерить их значения. Все блоки имеют управляющие входы, обозначенные буквой g.
В дополнительных библиотеках Extras помещены дополнительные дискретные и непрерывные блоки управления.
![]()
Рис. 7.4. Библиотека Power Electronics
Measurements - измерительные и контрольные устройства
Библиотека измерительных устройств показано на рис. 4.5.
![]()
Рис. 7.5. Библиотека измерительных приборов
В библиотеке измерительных устройств находятся блоки измерения мгновенного значения тока и напряжения, блок измерения токов и напряжений в трехфазной системе, измеритель полного сопротивления участка электрической схемы, а также блок Multimeter, позволяющий измерять переменные блоков без непосредственного подключения измерительных устройств. Блок Multimeter аккумулирует переменные тех блоков, для которых в окне их параметров в графе Measurement заданы измеряемые переменные. Выходными сигналами измерительных блоков являются обычные сигналы Simulink, которые можно подать на блоки отображения (Scope, Display) или на вход любого обычного Simulink-блока.
7.5. Powerlib Extras - расширенные библиотеки
Среди дополнительных библиотек (рис. 4.6) находится большое количество разнообразных блоков. В частности, библиотека дополнительных измерительных приборов, библиотека устройств управления преобразователями и т. д.
![]()
Рис. 7.6. Расширенные библиотеки
Пакет расширения, Sim Power System обеспечивает широкие возможности для расчета электротехнических устройств и систем и в настоящее время может считаться одним из лучших пакетов для моделирования устройств силовой электроники.
Рассмотрим основные элементы силовых полупроводниковых преобразователей и их представление в пакете Sim Power System.
В примерах, помещенных ниже, будут одновременно показаны возможности пакетов Simulink, Control System и Sim Power System по визуализации, измерению и исследованию электромагнитных процессов в схемах.
7.6. Активные элементы силовых полупроводниковых преобразователей в пакете Sim Power System
DC Voltage Source.
Идеальный источник постоянного напряжения
Блок вырабатывает постоянное по уровню напряжение. Пиктограмма и окно настройки блока приведены на рис. 7.7. В полях окна настройки параметров задаются:
Amplitude (V) – амплитуда (В) выходного напряжения источника. Measurments – измеряемые переменные. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope или измерить с помощью блока Powergui. Значения параметра выбираются из выпадающего списка:
None – нет переменных для отображения,
Voltage – выходное напряжение источника.
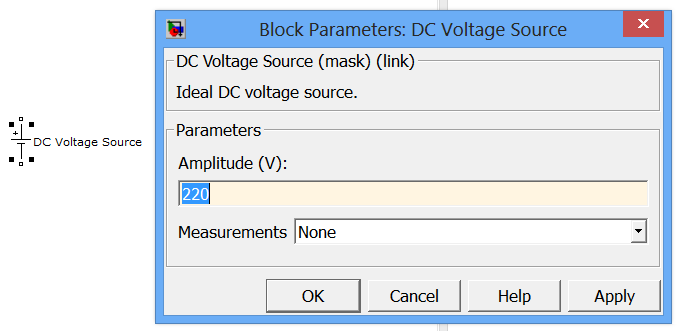
Рис. 7.7. Пиктограмма и окно настройки блока источника постоянного напряжения
Блок является идеальным источником напряжения, т. е. его собственное внутреннее сопротивление равно нулю.
Пример 4.1. На рис. 4.8 показан пример включения двух источников постоянного напряжения V1 = 200 B, V2 = 300 B на общее сопротивление R=50 Ом.
В схему модели введены блоки Multimeter и Powergui, измеряющие напряжения источников, напряжение и ток в сопротивлении. Окна блоков с результатами измерений показаны на рис. 4.9.