

книги / Основы САПР. CAD CAM CAE
.pdf
5.4. Немногообразные системы моделирования |
153 |
Существует множество комбинаций a(u,v) и ~(u,v), удовлетворяющих урав
нению (5.11). Один из простейших наборов a(u,v) и ~(u,v) можно получить, положив ~(u,v) =0:
н(u,v ) -_ дa(u,v). |
(5.12) |
ди |
|
Однако нелегко получить Н(и, v) и a(u,v) в явном виде, если уравнение по верхности S; задано в такой форме, которую нелегко раскрыть, например в
виде уравнения В-сплайна. Тиммер обошел эту проблему, приблизив H(u, v)
полиномом от и и v по численным значениям H(u, v). Тогда эта функция мо
жет быть выражена следующим образом:
м |
м |
|
H(u,v) = L L a;juivj |
(5.13) |
|
i=O j=O |
|
|
Подстановка (5.13) в (5.12) дает следующее выражение: |
|
|
м м |
1 |
(5.14) |
a(u,v) = L L:-.-aiiui+lvj |
||
i=Oj=O l + 1 |
|
|
Отсюда формулу (5.8) можно раскрыть в форме |
|
|
ljl;=ya(u,v)dv. |
(5.15) |
|
5.Контурный интеграл по замкнутой границе может быть разложен в сумму
интегралов по каждому из сегментов кривой. Следовательно, уравнение мож-
но переписать в виде |
|
|
|
|
ljl; = L:J a(u,v)dv, |
(5.16) |
|
где J - |
1=1 |
1 |
|
|
|
||
интеграл по сегменту криволинейной границы, взятый в направлении |
|||
1 |
|
L |
|
обхода всей границы (см. шаг 4), а L - суммирование по всем сегментам
1=1
границы.
Любой сегмент криволинейной границы области uv может быть задан приве
деиным ниже параметрическим уравнением1:
и =и(t), |
v =v(t), |
О::;; t::;; 1. |
(5.17) |
Подставляя (5.17) в (5.16), получим |
|
|
|
|
л |
dv |
(5.18) |
ljl; = L:J a[u(t),v(t)]-d dt, |
|||
1=1 |
о |
t |
|
где каждый интеграл, стоящий под знаком суммирования, может быть взят
точно по уравнению кривой каждого из сегментов или приближенн~ при по
мощи квадратуры Гаусса.
5.4. Немногообразные системы моделирования
В предыдущем разделе мы отмечали, что системы твердотельного моделирова
ния позволяют пользователю создавать тела с замкнутым объемом, то есть, говоря
математическим языком, тела, представляющие собой М1lоzообразия (manifold).
1 Параметрические уравнения различных кривых рассматриваются в главе 6.
5.4. Немногообразные системы моделирования |
155 |
вания, поскольку благодаря этому любую созданную в такой системе модель
можно было бы изготовить. Если же вы хотите работать с системой геометриче
ского моделирования на протяжении всего процесса разработки, это достоинство
оборачивается другой стороной. Конструктор, которому нужен пластиковый
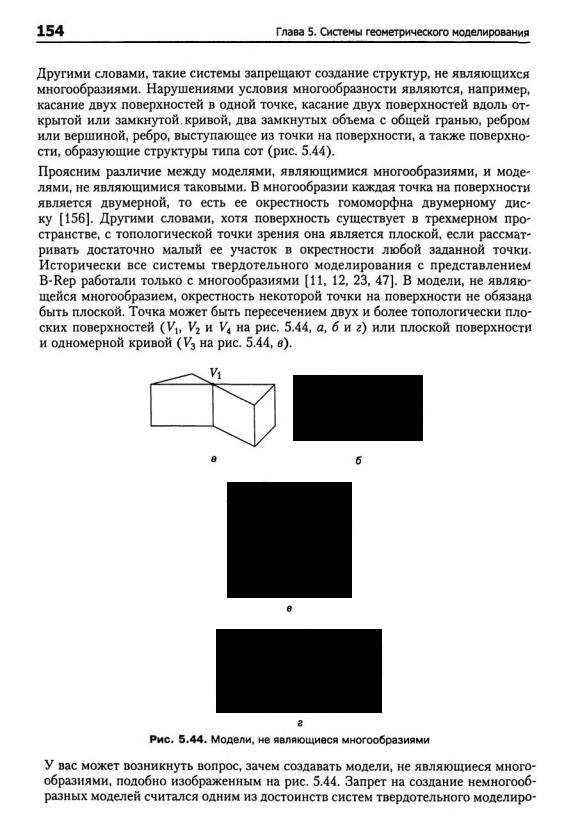
контейнер, мог бы начать с модели, подобной рис. 5.44, г, не вводя заранее дан
ных о толщине стенок контейнера. А геометрическая модель, показанная на
рис. 5.44, в, могла бы стать естественным началом для структуры, состоящей из
объемнрго блока и пластины, прицепленной к нему жгутом.
Абстрактная модель со смешением измерений удобна тем, что она не стесняет
творческую мысль конструктора. Модель со смешанными измерениями может
содержать свободные ребра, слоистые поверхности и объемы. Абстрактная мо
дель полезна также тем, что она может служить основой для проведения ана
лиза. На каждом этапе процесса проектирования могут применяться свои анали тические средства. Например, если нам нужно провести анализ компонента
методом конечных элементов, мы будем формировать сетку элементов на базе абстрактной модели, подобной изображенной на рис. 5.44, г, а не из объемной модели, стенки которой имеют нужную толщину. Немногообразные модели не
заменимы как этап развития проекта от непалнаго описания на низких уровнях
до готового объемного тела.
К сожалению, обычные системы геометрического моделирования (каркасные,
поверхностные и твердотельные) не поддерживают представление немногооб разных моделей, показанных на рис. 5.44. Большинство абстрактных моделей, появляющихся на промежуточных стадиях процесса разработки, состоят из сме
си одномерных, двумерных и трехмерных элементов (рис. 5.44, в) или только из
элементов пониженной размерности (рис. 5.44, г). Поэтому существует потреб
ность в системе моделирования, которая имела бы схему представления, способ
ную осуществлять переходы между одномерными, двумерными и трехмерными
геометрическими элементами. Такие системы моделирования называются 1lе
.М1lоюобраз1lыми (nonmanifold modeling systems). Они позволяют использовать
каркасные, поверхностные, твердотельные и сотовые модели одновременно в од
ной и той же среде моделирования, расширяя диапазон доступных моделей
сверх возможностей любой из упомянутых систем. Кроме того, появляется воз
можность проводить анализ, например, методом конечных элементов, непосред
ственно на исходном представлении модели, что позволяет автоматизировать
обратную связь между этапами проектирования и анализа, которая в настоящий
момент реализуется конструктором самостоятельно.
В процессе разработки немногообразной системы моделирования, точно так же, как и любой другой, встает задача выбора структуры данных и реализации опе
раторов для работы с элементами структуры. Затем разрабатываются команды
моделирования более высоких уровней. Они реализуются как последователь
ность операторов, подобно тому как в системах твердотельного моделирования
функции моделирования реализовывались через операторы Эйлера. Команды моделирования высших уровней в немногообразных системах кажутся похожи
ми на аналогичные команды систем твердотельного моделирования, несмотря на
то, что реализуются они через совершенно другие операторы. В приложении Д
мы кратко расска~.,.~м о структуре данных для хранения границ немногообразной
модели и об онераторах, позволяющих работать с этой структурой.
156 |
Глава 5. Системы геометрического моделированf'!Я |
5.5. Системы моделирования устройств
Системы геометрического моделирования (каркасные, поверхностные и твердо
тельные) всегда использовались главным образом для разработки и моделиро
вания отдельных деталей, а не устройств, состоящих из множества деталей. До
недавнего времени конструкторы проектировали детали поодиночке, а затем со
бирали их вместе на этапе разработки, проверяя, подходят ли они друг к другу и выполняют ли заданные функции. Такой подход был пригоден для неболыu11х
команд, работавших с простыми устройствами. Однако он неприемлем в том
случае, когда проект ведется несколькими командами, разбросанными по всему миру, а разрабатываемый агрегат должен быть достаточно сложным.
Конструктор может изменить конфигурацию компонента и забыть сказать об этом другим или забыть внести изменения в другие компоненты, зависимые от
измененного. Много времени уходит на атслеживанне проектов деталей, их со пряжения друг с другом, изменений, спецификаций, результатов тестированм
и других важных сведений, гарантирующих то, что отдельные части проекта со
стыкуются друг с другом. Это атслеживанне приходится осуществлять вручную.
В начале 1990-х rr. растущая потребность в совместном проектировании стала
главной движущей силой в разработке систем моделирования устройств. Эти системы аккуратно отслеживают детали и их связь друг с другом, чтобы конст рукторы могли работать со своими деталями в контексте всех прочих частей уст
ройства.
По всей видимости, наиболее широко системы моделирования устройств исполь
зуются в автомобильной и авиацианно-космической промышле}Jностях. Здесь требуется координация усилий не только конструкторов, но и поставщиков вто
рого и третьего ярусов.
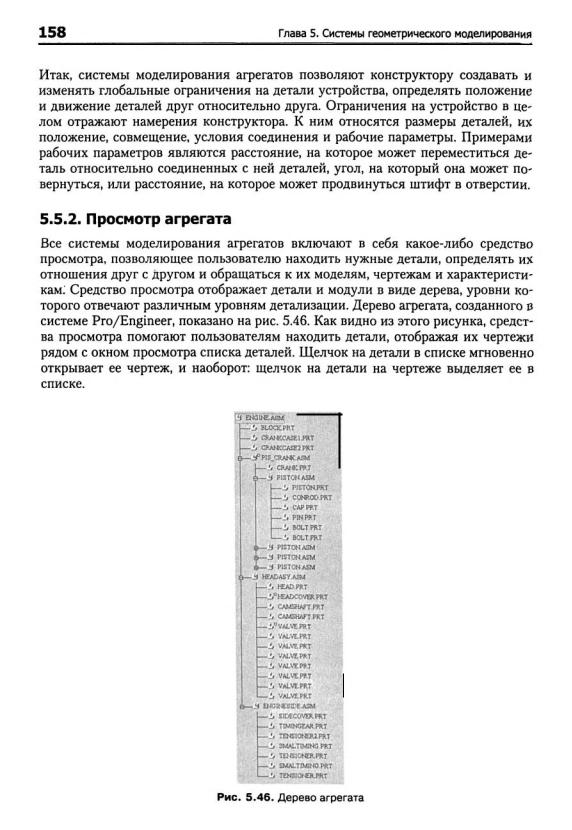
5.5.1. Базовые функции моделирования агрегатов
Системы моделирования агрегатов предоставляют логическую структуру для
группировки и организации деталей в устройства и узлы. Структура позволяет конструктору идентифицировать отдельные детали, следить за сведениями о них,
а также поддерживать взаимосвязь между деталями и узлами. Данные о связях,
поддерживаемые системами моделирования, включают довольно широкий диа пазон сведений о детали и ее взаимодействии с другими деталями агрегата. Наи
более важной составляющей этих данных являются условия соединения. Усло
вия соединения определяют способы соединения детали с другими (например,
две плоские поверхности деталей могут касаться друг друга, или две цилиндри
ческие поверхности могут располагаться на одной оси). Информация об экземп
лярах содержит сведения о том, в каких местах агрегата используется одна и та
же деталь. Экземпляр - удобная концепция для описания стандартных деталей,
в частности крепежных, поскольку она позволяет сохранить один раз параметры
деталей, а затем использовать их сколько угодно. Данные о посадке, положении
и ориентации определяют способы соединения деталей в устройство и часто включают в себя сведения о допусках. Положение и ориентация во многих сис темах могут быть получены из условий соединения деталей.
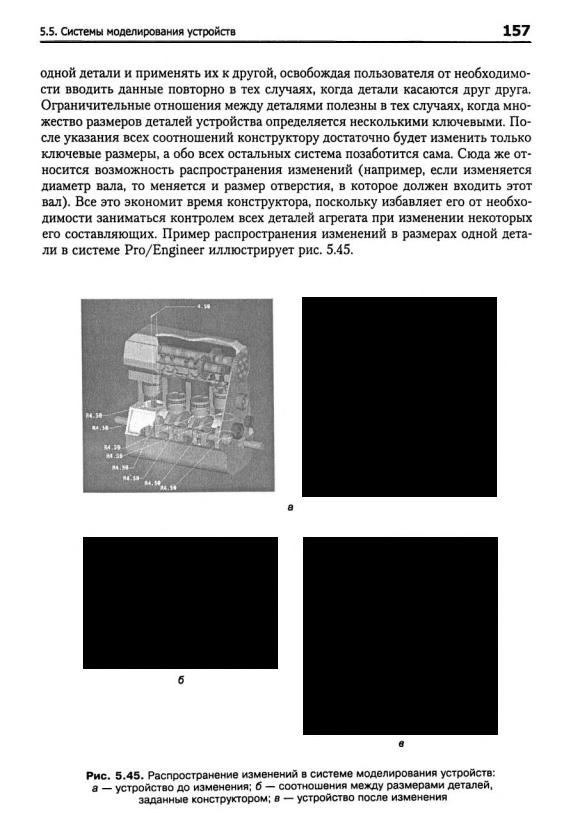
Системы моделирования агрегатов предоставляют возможность создавать пара
метрические ограничивающие отношения между деталями, измерять размеры

160 |
Глава 5. Системы геометрического моделирования |
|
|
|
|
Изображения с цветной визуализацией позволяют реалистично показать, I<ак выглядит агрегат из тысяч деталей. Пользователи могут не только рассматривать
сложные агрегаты, но и выполнять контроль столкновений, анализ кинематики и другие действия. Цифровая модель позволяет прогуляться по модели в вирту
альной реальности1, посмотреть, как она работает, и убедиться, что все детали
взаимодействуют так, как планировалось.
Системы моделирования агрегатов облегчают формирование списков материа лов (Ьill-of-materials- БОМ), в которых перечисляются все материалы и детали,
подлежащие закупке. Такой список легко построить, просмотрев структуру агре
гата и объединив сведения обо всех деталях.
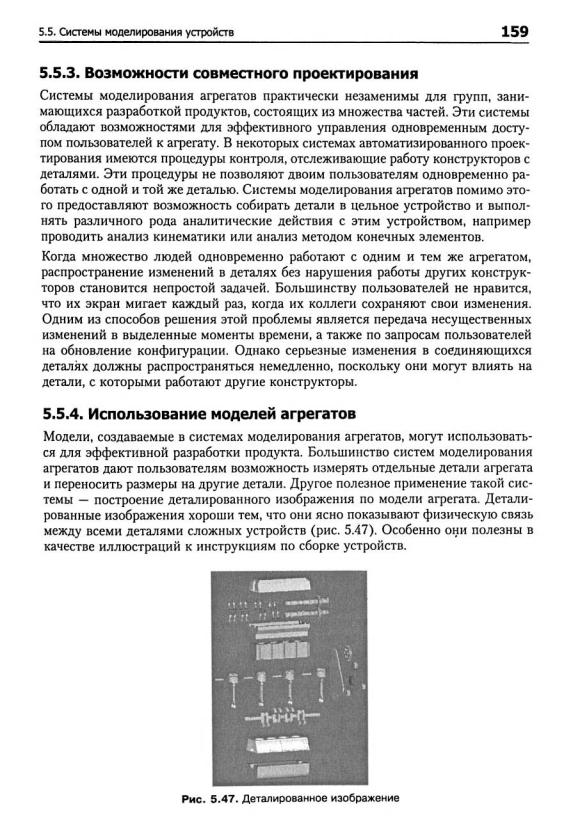
5.5.5. Упрощение агрегатов
Большинство систем геометрического моделирования со стандартными возмож
ностями моделирования агрегатов легко справляются с устройствами, состоящи
ми из сотен деталей. Затруднения возникают при обработке больших агрегатов
с многими тысячами деталей. Производительность системы зависит также от
сложности деталей и узлов. Примерам особенности, влияющей на производи тельность, является поверхность сопряжения. Большое количество деталей и их
сложная форма способны поглотить вычислительные возможности любой систе
мы, снизить производительность системы моделирования и затруднить поиск
информации. Поэтому во многих системах предусмотрены функции упрощения
сложных агрегатов для облегчения работы с ними.
Одним из методов является использование экземпляров, о чем уже говорилось выше. Использование экземпляров значительно упрощает агрегаты, поскольку
системе приходится моделировать стандартную деталь только один раз, после
чего достаточно лишь задать положения экземпляров этой детали. Экземпляры
реализуются на базе единого определения, включающего в себя геометрическую модель детали и все необходимые сведения о ней. Такой подход, очевидно, уст раняет необходимость моделировать деталь, используемую в нескольких местах. Кроме того, экземпляры легко изменять, поскольку изменения достаточно вне
сти один раз.
Другим методом является укрупиение, или интеграция (agglomeration), то есть
группировка всех деталей или отдельных узлов в одно целое. При этом исчезают
все внутренние особенности узлов, а сохраняются только внешние. Если пользо вателю нужна лишь внешняя форма, это значительно упрощает работу с моде
лью. Укрупнение применяется для повышения производительности динамиче
ского отображения агрегатов.
Сложность модели может быть снижена методом игнорирования особенностей
деталей в тех случаях, когда они не важны. Однако эти детали постоянно сохра
няются как часть геометрической модели. При построении изображения мелкие детали, невидимые с заданного расстояния, просто отбрасываются. При анализе
методом конечных элементов или при кинематическом анализе можно игнори
ровать мелкие детали типа небольших отверстий и закруглений. Допускается и
зональное отключение детализации. При этом пользователь может разделить
1 Рассказ о виртуальной реальности пойдет в главе 13.
5.6. Моделирование для Web |
161 |
модель на геометрические блоки и работать с одним из них, не тратя вычисли тельные ресурсы на обработку деталей в других блоках. Модель может быть по делена на блоки не только геометрически, но и функционально: механическую,
электрическую и гидравлическую подсистемы можно обрабатывать раздельно,
чтобы не иметь дела с данными, не нужными в конкретный момент пользователю.
5.6. Моделирование для Web
Производители систем CAD/CAM/CAE уверенно продвигаются в направле нии интеграции своих систем с Интернетом. Встроенные возможности работы с
Интернетом уже начинают появляться в таких системах. Используя Интернет в
качестве расширения системы геометрического моделирования, команда, рабо тающая над проектом, может при помощи браузеров и подключаемых модулей просматривать модели и работать с ними уже на ранних стадиях процесса разра
ботки.
Одним из способов распространения геометрических данных в Сети является
сохранение их на веб-странице в формате, доступном для чтения браузеру.
Пользователь, у которого есть браузер, введет в строке адреса универсальный локатор ресурса вашей страницы (ее URL) и увидит изображение геометриче
ской модели. Это называется ее публикацией (puЬ/ishing).
Производители систем геометрического моделирования поддерживают публика
цию, включая в свои системы возможность экспорта геометрических данных в
форматах, доступных для чтенИя браузерами. Одним из таких форматов являет
ся язык описаиия виртуалыюй реалыюсти ( Virtual Reality Mode/ing Language -
VRML), поддерживаемый стандартными браузерами. Можно сохранить данные и
в форматах типа Computer Graphics Metafile (CGM) или Dra\ving Web Format
(DWF) фирмы Autodesk, что потребует от пользователя установки специально го подключаемого модуля для браузера.
VRML - стандартный формат для описания трехмерных графических структур,
тогда как CGM и DWF являются двумерными форматами. Хотя VRML имеет
некоторые ограничения, в частности низкую точность и большие размеры фай
лов, большинство производителей решили поддержать возможность сохранения
в формате VRML, поскольку этот формат является трехмерным. Некоторые по
шли еще дальше, предоставив пользователям средства для встраивания VRML в
веб-страницу с текстом и гиперссылками. Файлы VRML, так же как и гипертек
стовые файлы, могут содержать ссылки на любую информацию в Сети, в том
числе и на другие VRМL-файлы. Пользователь, просматривающий такой файл, видит перед собой объемную модель трехмерного тела. Ссылки "На URL иденти
фицируются по изменению положения курсора, точно так же, как и при работе с
обычными веб-страницами. Щелчок мыши на ссылке приводит к загрузке фай
ла, на который она указывает. Например, щелкая на разных частях модели, поль
зователь может открывать окна с информацией, предоставленной другими чле
нами команды. Щелкнув в углу картинки, пользователь увидит технические
характеристики модели и узнает, что о ней думают его коллеги. Еще одна rипер
ссылка может указывать на каталог деталей, руководство по стандартам или
даже на адрес электронной почты руководителя проекта.