книги / Основы САПР. CAD CAM CAE
.pdf132 |
Глава 5. Сисrемы геометрического моделирования |
на тело снаружи. Благодаря тому что ребра хранятся согласованно, вместе с каж
дой гранью сохраняется информация о том, с какой стороны от нее находится
внутренний объем тела. Другими словами, имея сведения о гранях, вы можете
определить, где расположена конкретная точка: снаружи или внутри тела. Вер
шины, ребра и грани, изображенные на рис. 5.25, нумеруются системой геомет
рического моделирования в произвольном порядке в момент сохранения сведе
ний из табл. 5.1.
Таблица 5.1. Три таблицы представления B-Rep
Таблица граней |
Таблица ребер |
|
Таблица вершин |
|
|
|
|
|
|
Грань |
Ребра |
Ребро |
Вершины |
Вершина Координаты |
Ft |
|
Et. Es, Ев |
Et |
v1. |
v2 |
Vt |
Xt,yt, Zt |
F2 |
|
Е2, Ев, Е1 |
Е2 |
V2. |
Vз |
v2 |
Х2, У2• Z2 |
Fз |
|
Ез. Е1. Ев |
Ез |
Vз. |
V4 |
Vз |
хз, уз, zз |
|
|||||||
F4 |
|
Е4, Ев, Es |
Е4 |
v4, |
v1 |
v4 |
Х4, У4• Z4 |
|
|
|
|
|
|
|
|
Fs |
|
Et, Е2, Ез, Е4 |
Es |
Vt. |
Vs |
Vs |
Xs, Ys. zs |
|
|
|
|
|
|
|
|
|
|
|
Ев |
V2, |
Vs |
Vв |
Хв, Ув. zв |
|
|
|
|||||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Е1 |
Vз. |
Vs |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Ев |
V4, |
Vs |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Vs
Fs
Рис. 5.25. Объемное тело, сохраняемое в табл. 5.1
В каждой строке таблицы ребер хранятся вершины, находящиеся на концах со ответствующего ребра, а в строках таблицы вершин хранятся координаты всех вершин. Эти координаты обычно определяются в модельной системе коорди}'{ат, связанной с данным телом. Если убрать отсюда таблицу граней, эту структуру данных можно будет использовать для хранения форм, созданных в систеl\iах
каркасного моделирования. Структура данных для каркасной модели может ис
пользоваться в качестве базовой для систем автоматизированной разрабоrки
чертежей, если допустить указание двумерных координат для точек.
134 |
Глава 5. Системы геометрического моделирования |
Есть две распространенные структуры данных, которые позволяют избежать перечисленных проблем при сохранении граничного представления объемного тела. Это структура полуребер (half-edge data structure) и структура кръUlъевы.х
ребер (winged-edge data structwe).
Структура полуребер
В качестве средства для борьбы с таблицей Граней перемениого размера можно
использовать двусвязный список1, в который помещаются сведения обо всех
вершинах данной грани (рис. 5.27). Для каждой грани сохраняется указатель на
первое ребро списка, а не весь список, тогда как в структуре каждого ребра име
ются указатели на предыдущее и последующее ребро того же списка. В резуль
тате в таблице граней будет фиксированное число столбцов. Список ребер при
этом всегда можно будет восстановить, переходя от одного ребра к другому по
указателям (например, список ребер Е5, Е6 и Е1 для грани F1). Грань F1 может хра
нить указатель на Е6 или Е1, но список ребер всегда будет один и тот же.
Рис. 5.27. Двусвяэный список грани F1
Однако мы немедленно столкнемся с другой проблемой, когда перейдем к грани F2, которая имеет общее ребро Е6 с гранью F1 (рис. 5.25). Двусвязный список для
грани F2 должен выглядеть так, как показано на рис. 5.28. По этому рисунку вид
но, что для ребра Е6 последующим является Е7, а предыдущим - Е2• Сохранив
соответствующие указатели, мы изменим заданные ранее значения указателей,
обеспечивавшие ребру Е6 место в списке ребер грани F1, то есть фактически раз рушим список ребер грани F1•
Рис. 5.28. Двусвяэный список грани F2
Чтобы решить эту проблему, нужно разделить каждое из ребер на две половинки
и использовать каждую из них в списке ребер той грани, к которой она относит
ся. Деление ребра осуществляется таким образом, что его половинки оказывают
ся противоположно направленными (рис. 5.29). Для каждой грани сохраняется
двусвязный список полуребер, а не обычных ребер. Полуребра каждой грани со
бираются в список таким образом, чтобы направление каждого из них согласо-
1 Эту проблему можно решить и с односвязным списком. Мы выбрали двойной связный
список, чтобы получить ту полуреберную структуру, которую предложил Мянтюля
[106).

5.3. Системы твердотельного моделирования |
135 |
вывалось с направлением обхода границ грани: против часовой стрелки, если смотреть снаружи тела. В результате получаются двусвязные списки полуребер для граней F1 и F2 (рис. 5.30). Теперь никаких проблем, приводящих к разруше
нию списка для ребра F1, не возникает.
Vs
Fs
Рис. 5.29. Полуребра рассматриваемого тела
С?- h4 ~ h11 ~ ht4 3)
Рис. 5.30. Двусвяэньtй список полуребер
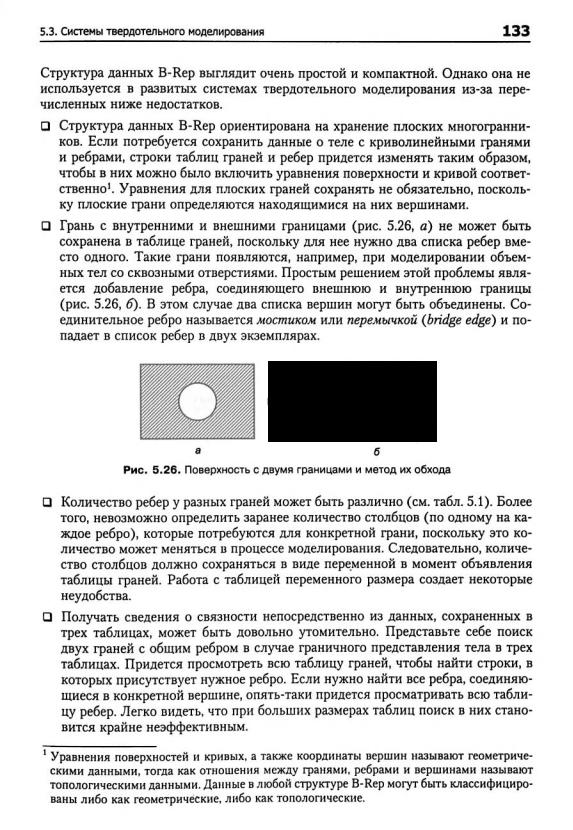
Для описания граней с внутренними отверстиями без добавления избыточных
соединительных ребер используются кольца. Кольцо (loop) - это список ребер, ооразующих замкнутую цепочку, так что любая грань ограничивается одним внеш
ним кольцом и может ограничиваться внутренними1, определяющими отвер
стия. Теперь каждая грань может ссылаться на список полуребер через кольцо,
а не непосредственно. Другими словами, для каждой грани хранится двусвязный
список колец, а для каждого кольца хранится список полуребер. Это позволяет обрабатывать грани с любым количеством отверстий без добавления мостиков.
На рис. 5.31 показано, как хранится в памяти грань с отверстиями при помощи
колец. Обычно в структуру грани включается указатель на внешнее кольцо,
а оно становится первым элементом двусвязного списка колец. У каждого коль
ца есть список полуребер, направление которых противоположно направлению внешнего кольца. Другими словами, полуребра отверстия помещаются в список
1Внешнее кольцо и кольца отверстий называются также родительским (parent loop) и до
черними кольцами (child loop) соответственно.

136 |
Глава 5. Системы геометрического моделирования |
в таком порядке, что их направления совпадают с направлением обхода отвер
стий по часовой стрелке, если смотреть снаружи тела. На рис. 5.31 полуребра
кольца L 1 обходятся против часовой стрелки (это кольцо внешнее), а полуребра колец L2 и L3 - по часовой стрелке (эти кольца внутренние).
((" hl ~ h3 ~ h~ ~ h, 5)
Рис. 5.31. Описание грани с отверстиями nри помощи колец
Последовательность обхода полуребер отверстий противоположна последова
тельности обхода полуребер внешнего кольца для того, чтобы сохранить инфор
мацию о внутренней и, внешней сторонах грани. Направления обхода выбраны таким образом, чтобы внутренняя часть грани всегда была по левую сторону при
обходе любого кольца в соответствующем направлении.
Структура данных с полуребрами и кольцами имеет множество преимуществ пе
ред структурой с таблицами вершин, ребер и граней. В структуре с полуребрами и кольцами можно сохранять данные о связности вершин, ребер и граней и по
этим данным получать сведения о смежности. Мы уже показали, что получить
такие данные по исходной простой таблице - задача непростая. Однако благодаря полуребрам и кольцам в структуре сохраняются сведения о связности вершин, ребер и граней, и тогда задача упрощается. Вершины, ребра и грани указывают на соответствующие полуребра и кольца, для которых сохраняются сведения о смежности. Чтобы обеспечить связь между ребром и его полуребрами, для каж дого ребра сохраняются указатели на соответствующие полуребра, а для полуре
бер - указатели на родительские ребра. Аналогичным образом, для каждой вер
шины сохраняется указатель на одно из полуребер, исходящих из нее, а для
каждого полуребра сохраняется указатель на его начальную вершину1• Для гра
ни сохраняется указатель на внешнее кольцо, а для кольца - указатель на роди
тельскую грань (см. рис. 5.31). Сведения о смежности колец и полуребер сохра
няются естественным способом (каждое кольцо представляется в виде двусвязного списка полуребер).
Покажем, как можно получить информацию о смежности вершин и ребер из со храненной структуры данных, чтобы продемонстрировать наличие в структуре всей необходимой информации. Например, попробуем найти все ребра, исходя щие из вершины V1 (рис. 5.32). Поиск начинается с полуребра, указатель на ко торое сохранен в вершине. Это может быть любое полуребро из тех, что соедине ны с данной вершиной. Обозначим его h1 (см. рис. 5.32). Процедура поиска будет выглядеть следующим образом.
1 Вершина полуребра считается начальной или конечной в соответствии с направлением
этого полуребра.

5.3. Системы твердотельного моделирования |
137 |
1.Если вершина Vt является начальной вершиной h1 (в нашем случае так и есть),
то выбирается полуребро, предшествующее h1 (prev_h1 ), а его родительское ребро оказывается одним из нужных нам ребер, соединенных с V1• Теперь ме
сто ht занимает сопряженное полуребро prev_h1 (которое мы обозначаем new_h1)
и шаг 1 повторяется. Если V1 -конечная вершина h1, выбирается полуребро,
следующее за ht, а его родительское ребро считается одним из подходящих
к вершине. Затем вместо h1 берется полуребро, сопряженное со следовавшим
за ht, и шаг 1 повторяется с полуребром new_h1.
2.Процесс повторяется до тех пор, пока не будет достигнуто полуребро, сопря женное с исходным h1•
Рис. 5.32. Получение данных о смежности ребер и вершин
Реализация структуры данных полуребер представлена в приложении А. Струк
туру данных, используемую в системе твердотельного моделирования GWB,
разработанной Мянтюля [106], демонстрирует листинг А.1. В книге [106] рас
сказывается о некоторых дополнительных указателях. В некоторых случаях ока
зывается выгоднее сохранить избыточные указатели, чем вычислять их заново, особенно если выполнять это пришлось бы часто. Количество и назначение из быточных указателей должны планироваться в процессе проектирования струк
туры данных. Реализация процедуры поиска всех ребер, исходящих из конкрет
ной вершины, на предлагаемой структуре данных, представлена в листинге А.2.
Структура крыльевых ребер
Структура полуребер представляет собой список граней, каждой из которых со ответствует двусвязный список ребер. В этой структуре главная роль в описании
объемного тела отводится граням. В структуре крьUlьевыхребер (winged-edge data structure) главная роль, напротив, отводится ребрам. Для каждого ребра сохраня ется список граней, которым оно принадлежит, ребер, с которыми оно имеет об щие вершины, и вершин на его концах. Список ребер для каждой грани не сохра няется в структуре в явном виде, поскольку он может быть получен анализом любого ребра грани и соседних с ним ребер. Проблема неопределенности коли
чества ребер у граней решается без введения связных списков и, следовательно, полуребер. Последнее объясняет, почему сведения о связности вершин, ребер и
граней сохраняются в структуре данных в явном виде. В структуре полуребер
связность неявно описывалась самими полуребрами. Мы уже отметили некото
рую часть сведений о связности: для кщкдого ребра сохраняются грани, которым
оно принадлежит, соседние ребра и конечные вершины.
138 |
Глава 5. Системы геометрического моделирования |
Структура крыльевых ребер впервые была предложена Бомгартом [11]. Брейд
расширил ее, добавив поддержку тел со сквозными отверстиями посредством ис пользования колец [23].
Определим структуру крыльевых ребер для фигуры, изображенной на рис. 5~33. Ребро Е1 является смежным с четырьмя другими ребрами: Е2, Е3, Е4 и Е5, каждое из которых содержит одну из двух вершин ребра Е1• Если рассматривать ребро Е1 как фюзеляж самолета, четыре ребра Е2, Е3, Е4 и Е5 будут его крыльями. Эти че
тыре смежных ребра называются крыльевыми ребрами Е1• Каждое из них долж но быть сохранено под отдельным именем с информацией о положении этого
ребра относительно Е1• Именуются крыльевые ребра так. Вначале Е1 назначается
определенное направление (рис. 5.33). Здесь ребро направлено от вершины V1 к
вершине V2• Затем следует представить себе, что вы лежите вдоль ребра Е1 так, что голова направлена к V2 (а тело, разумеется, находится снаружи объема). Вы тяните руки и ноги так, как если бы вы летели. Левая рука коснется ребра Е2,
правая рука - ребра Е3, левая нога - ребра Е4, правая нога - ребра Е5• Поэтому ребро Е2 называют ребром левой руки, Е3 - ребром правой руки, Е4 - ребром ле вой ноги, Е5 - ребром правой ноги. Если Е1 направить в противоположную сто рону, Е5 будет ребром левой руки, Е4 - ребром правой руки, Е3 - ребром левой ноги и Е2 - ребром правой ноги. Направление каждого ребра устанавливает ся произвольно в момент создания объемного тела и сохранения его структуры крыльевых ребер.
Помимо связности ребер в терминах крыльевых ребер необходимо также опи
сать связность граней и ребер. Поэтому для каждого ребра сохраняются указате ли на две грани, которым оно принадлежит. Например, для ребра Е1 на рис. 5.33 сохраняются указатели на ребра F1 и F2 (левое и правое соответственно). Назва
ния ребер определяются направлением Е1• Граням присваиваются разные назва
ния по той же схеме, по которой они присnаиваются крыльевым ребрам. Брейд
предложил использовать кольца для сохранения сведений о телах со сквозными
отверстиями в структуре крыльевых ребер. Связь между гранью и ее ребрами за
дается неявно при помощи колец. Каждое ребро хранит указатель на свое левое
и правое кольца, а не на левую и правую грань. Например, на рис. 5.33 ребро Е1
хранит указатель на L 1 как на левое кольцо и на L2 как на правое кол'ьцо. Если
направление Е1 изменить на противоположное, названия колец также изменятся. Кольца содержат указатели на все ребра, которые к ним относятся. Это дает воз можность получить список всех ребер одного кольца. Процедура аналогична по
лучению списка полуребер начиная с любого произвольнаго полуребра, на кото
рое имеется указатель в кольце.
Теперь рассмотрим описание связности ребер и вершин. Вспомните, что у каж
дого ребра на концах находятся вершины. Эти вершины сохраняются под имена
ми предыдущая вершина (previous vertex или tail vertex) и последующая вершина
(пехt ve1te.т или head vertex), поскольку все ребра имеют направления. На рис. 5.33 V1 является предыдущей вершиной для Е1, а V2 - последующей. Сохраняются не
только указатели на вершины в структурах ребер, но и указатели на ребра в
структурах вершин - по одному ребру для каждой вершины. Это позволяет вы
делить ребро, начиная с которого перечисляются все ребра, сходящиеся в одной вершине. При реализации функций моделирования, в особенности содержащих
5.3. Системы твердотельного моделирования |
139 |
операторы Эйлера (см. раздел 5.3.3), приходится часто просматривать списки ре
бер, сходящихся в одной вершине.
Описанные способы сохранения информации о связности вершин, ребер и гра
ней иллюстрирует рис. 5.34.
|
|
vl |
|
|
Рис. 5.33. Определение структуры крыльевых ребер |
||||
|
Следующая вершина |
|
||
Ребро левой руки |
~ t / |
Ребро правоИ руки |
||
Кольцо |
Вершина |
|||
|
|
|||
Левое кольцо |
|
Ребро- |
Правое кольцо |
|
|
||||
+ |
/ |
~ ~ |
+ |
|
Ребро |
Ребро |
|||
Ребро левой ноги |
Ребро правой ноги |
|||
Предыдущая вершина
Рис. 5.34. Связность вершин, ребер и граней
Помимо описанных связей сохраняются также связи между гранями и их кош,
цами, как n структуре данных полуребер. А именно, для каждой грани сохраняет
ся указатель на ее внешнее кольцо, а для nнешнего кольца сохраняется указатель
на кольцо отверстия, если в данной грани оно есть. Кольцо отверстия может ука
зьшать на другое кольцо отверстия, если в грани отверстий несколько; в против
ном случае оно указывает обратно на nнешнее кольцо (рис. 5.35). Кроме того, для
каждого кольца сохраняется указатель на его родительскую грань. Заметьте, что здесь используется односвязный список, а не двусвязный, I<ак на рис. 5.30.
Выбор односвязного или дnусвязного списка определяется тем, что считается более важным - эффективность обращения к данным или комiJактносп, струк
туры.
Грань
L / ~ ----------
Кольцо 1 - Кольцо2- ·• · -n ~
Рис. 5.35. Связи между гранью и ее кольцами
Пример реализации структуры д<шных крыльевых ребер на языке С Jtемонстрн
рует листинг Б.1 в приложении Б. Эта структура данных испольэуется в систеl\lе
твердотельного моделирования SNUMOD, разработанной в Сеульском государ-

140 |
Глава 5. Системы геометрического моделирования |
ственном университете в Корее. В листинге присутствует новый элемент - обо лочка (shell). Оболочка - это трехмерное расширение кольца, то есть список гра
ней, образующих замкнутый объем. Обычно в объемном теле может быть только
одна оболочка, если в нем нет полостей. Полость в объемном теле - это трехмер ное расширение кольца отверстия в грани. Следовательно, концепция оболочки позволяет описывать объемные тела с полостями точно так же, как концепция
кольца отверстия позволяет описывать грань с отверстиями.
Сrруктура декомпозиционной модели
Объемная модель может быть приближенно представлена в виде совокупности
простых тел, например кубов. Такая модель называется деко.мпозициотюй
(decomposition model). Можно предложить много декомпозиционных моделей описания одного и того же тела. Модель включает в себя простейшее тело и ме тод объединения в совокупность. К типичным декомпозиционным моделям с со
ответствующими структурами данных относятся воксельное представление,
представление октантнога дерева и ячеечное представление.
Ваксельное предсгавление
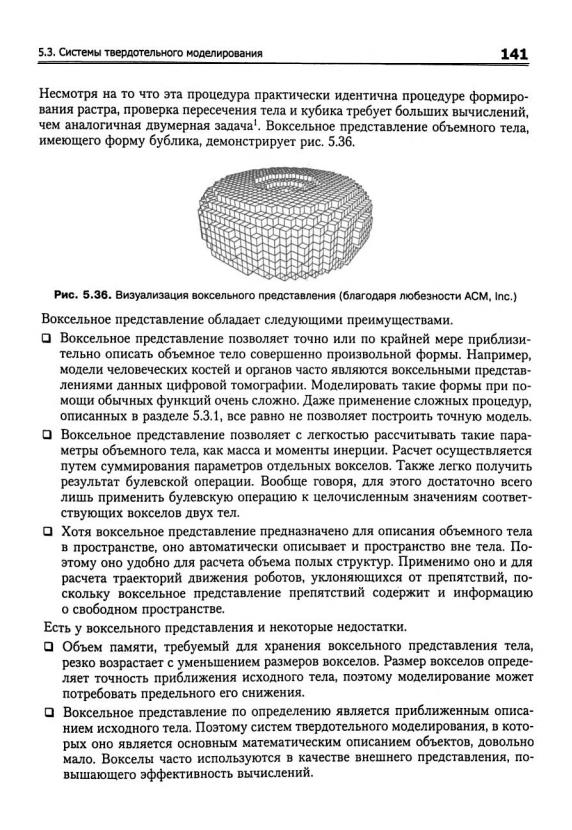
Боксельное представление (voxel representation) объемного тела - это просто трехмерный аналог растрового представления плоской фигуры. Чтобы расска
зать о ваксельном представлении, нам придется вспомнить процедуру получе
ния растрового представления или растрового изображения. Растровое изобра
жение двумерного объекта формируется следующим образом. Сначала создается
квадрат, размер которого соответствует интересующей нас области двумерного пространства. Затем квадрат делится на много маленьких квадратиков путем на
несения на него линий сетки. Расстояние между линиями сетки определяется желаемой точностыо растрового представления. Другими словами, если это рас
стояние будет очень маленьким, то растровое изображение будет очень точно
воспроизводить форму исходного двумерного объекта. В противном случае по лучится лишь грубое приближение. Квадрат, содержащий много маленьких
квадратиков, представляется в компьютере в виде двумерного массива, количе
ство элементов в котором совпадает с количеством квадратиков. Наконец, боль шой квадрат накладывается на двумерный объект, и элементы массива, соответ ствующие квадратикам, находящимся над объектом, получают значение 1, а
остальные элементы получают значение О. Получившийся массив нулей и еди
ниц становится растровым представленнем двумерного объекта.
Боксельное представление объемного тела получается при помощи той же про
цедуры, что и растровое представление. Однако начинается она не с большого
квадрата и маленьких квадратиков, а с большого куба и маленьких кубиков, на
зываемых воксела.ми1• Деление на вокселы осуществляется сеткой плоскостей,
расналоженных на равном расстоянии друг от друга перпендикулярно осям х, у
и z. Исходный куб представляется в виде трехмерного массива, количество эле
ментов которого совпадает с количеством кубиков, и каждому элементу массива
присваивается значение О или 1 в зависимости от положения элемента в теле.
1 Боксел - это трехмерный аналог пикссла. Последние четыре буквы названия взяты от
слова спиксел• (pixel), а первые две - от слова собъем• (volume).