

15.3 Тензорезисторы
Для измерения малых перемещений возникающих при деформации упругих элементов конструкции широкое применение нашли тензорезисторы, т.е. резисторы, сопротивление которых изменяется при их растяжении или сжатии.
В исходном (недеформированном) состоянии проводник диаметром d0 и длиной L0 имеет сопротивление
Если под действием растягивающего проводник усилия продольная деформация имеет величину ΔL, то поперечная деформация проводника составит
![]()
где - коэффициент Пуассона.
В деформированном состоянии сопротивление проводника
![]() (88)
(88)
Принимая, что изменения параметров малы по сравнению с начальными значениями,можно найти
![]() (89)
(89)
Поскольку все изменения соответствуют упругим деформациям, то для каждого материала можно найти коэффициент тензочувствительности, связывающий величину изменения сопротивления и величину деформации
![]() (90)
(90)
Для распространенных материалов - манганина и константана КТ ≈ 2.
Основная трудность в использовании тензорезисторов – малая величина изменения сопротивления (ΔL/L0 ≈ 10-3 – 10-5). Соответственно изменение падения напряжения на тензорезисторе составит такого же порядка долю от напряжения питания. Измерение таких малых изменений напряжения по сравнению с большими напряжениями лежит за пределом возможности измерительных устройств. Проблема решается использованием мостовых схем измерения (рис. 141).
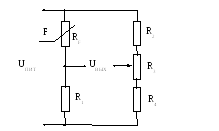
Рис. 141.
Электрическая мостовая схема с тензорезистором.
Тензорезистор RF включен в одно из плеч моста. В ненагруженном состоянии тензорезистора мост балансируется с помощью регулировочного сопротивления R3 и на выходе моста напряжение равно нулю. При деформации тензорезистора в выходной диагонали появляется напряжение, вызванное разбалансировкой моста из-за изменения сопротивления тензорезистора. Это напряжение по-прежнему имеет величину, измеряемую единицами и долями милливольт, но теперь его можно усилить до требуемого значения с помощью соответствующего электронного усилителя.
На величину сопротивления тензорезистора влияет не только его деформация, но и изменение температуры. Для уменьшения влияния температуры на измерение деформации применяют мостовые схемы с двумя идентичными тензорезисторами, сопротивление которых изменяется дифференциально (рис. 142). Этого можно достичь соответствующим размещением тензорезисторов – при нагружении детали один тензорезистор должен подвергаться сжатию, а другой – растяжению.
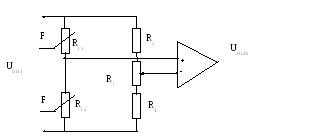

Рис. 142
Дифференциальная мостовая схема включения тензорезисторов.
Устройство наиболее распространенного типа наклеиваемого проволочного тензорезистора изображено на рис. 143 а. На полоску тонкой бумаги или лаковую пленку 2 наклеивается так называемая решетка из зигзагообразно уложенной тонкой проволоки 3 диаметром 0,02 – 0,05 мм. К концам проволоки присоединяются (пайкой или сваркой) выводные медные проводники 4. Сверху преобразователь покрывается слоем лака 1. Такой преобразователь, будучи приклеенным к испытуемой детали, воспринимает деформации ее поверхностного слоя. Измерительной базой преобразователя является длина детали, занимаемая проволокой. Наиболее часто используются преобразователи с базами 5-20 мм, обладающие сопротивлением 30-500 Ом.
Фольговые преобразователи представляют собой ленту из фольги толщиной 4-12 мкм, на которой часть металла выбрана травлением таким образом, что оставшаяся его часть образует решетку с выводами. Фольговые преобразователи имеют меньшие габариты, чем проволочные; известны тензорезисторы с базой до 0,8 мм.
Металлические пленочные тензорезисторы изготавливаются путем вакуумной возгонки тензочувствительного материала с последующим осаждением его на основу (подложку). Форма тензорезистора задается маской, через которую производится напыление. Пленочные тензорезисторы имеют толщину менее 1 мкм.
Важным параметром тензочувствительной решетки является расстояние между витками. Это расстояние определяет при заданных габаритах резистора число витков и, следовательно, сопротивление, а также допустимый ток, который ограничивается самонагревом и будет тем меньше, чем меньше расстояние между витками. Кроме того, наличие поперечных участков длиной b (рис 143 а) вызывает изменение сопротивления тензорезистора за счет деформации этих участков при действии на деталь напряжения , перпендикулярного оси чувствительности тензорезистора. Для проволочных тензорезисторов отношения поперечной и продольной чувствительностей определяется отношением b/l. У фольговых тензорезисторов поперечная чувствительность значительно меньше за счет расширения поперечных участков (рис. 143 б). Характерные типы фольговых преобразователей показаны рис 143, в, г, д. на рис. 143 в изображен элемент, состоящий из четырех тензорезисторов, образующих четыре плеча моста. Этот элемент наклеивается на мембрану. Тензорезисторы, расположенные в центре, испытывают растяжение, на периферии – сжатие. К выводам 1 и 3 подводится питание, выводы 2, 4' и 4" образуют измерительную диагональ. Выводы 4' и 4" разомкнуты для того, чтобы можно было включить добавочный резистор R в нужное плечо и добиться подбором R равновесия моста.
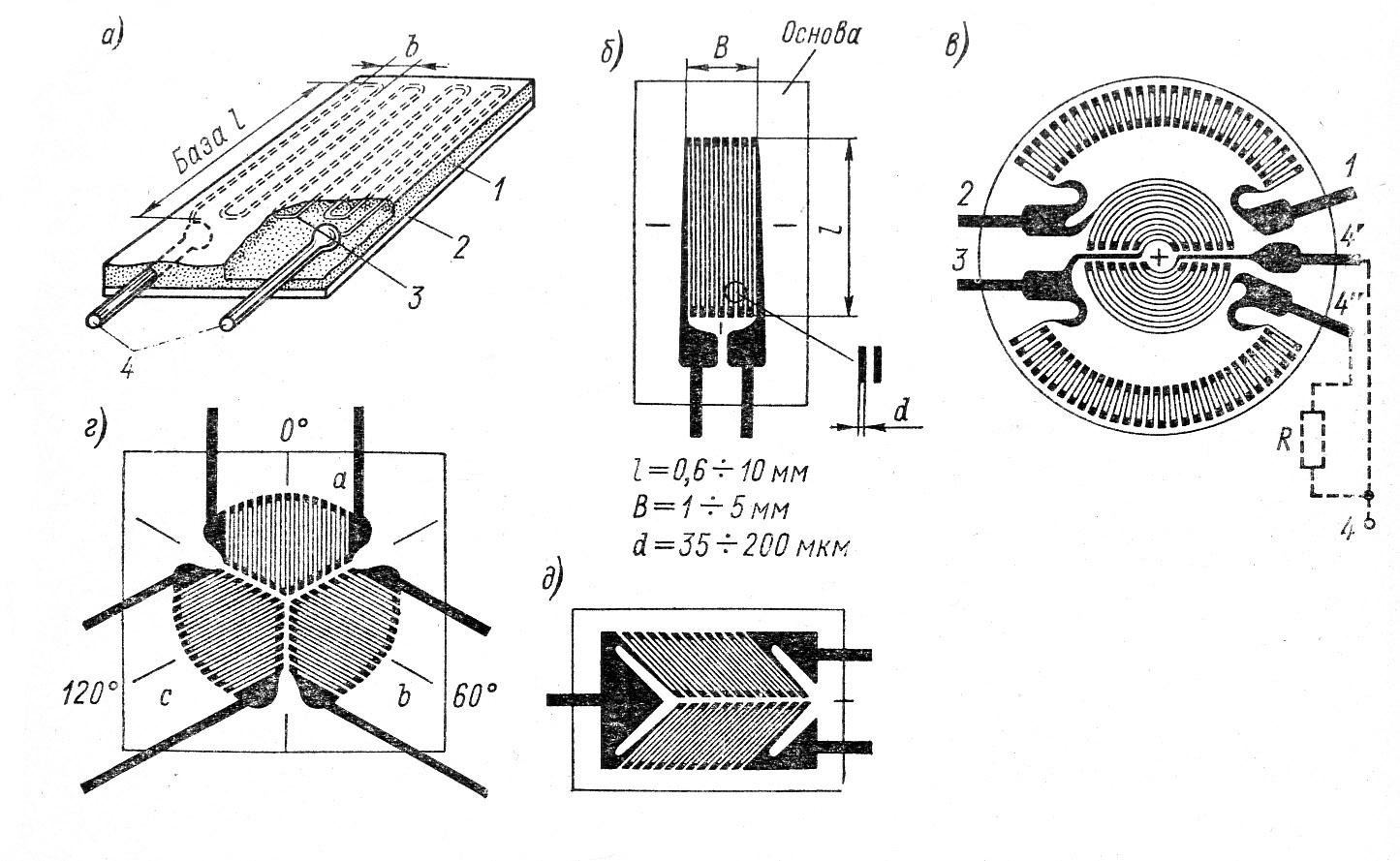
Рис. 143.
Тензорезисторы.
Розетка из трех тензорезисторов, показанная на рис 143 г , применяется при измерении напряжений детали, находящейся в плосконапряженном состоянии, в том случае, когда направления действия напряжений неизвестны. По изменениям сопротивлений трех тензорезисторов определяются направления главных напряжений и их значения.
Элемент, показанный на рис 143 д, состоит из двух тензорезисторов и используется при измерении деформации валов при их скручивании.
Кроме металлических в настоящее время используются полупроводниковые тензорезисторы, изготовленные из тонких полосок кремния или германия. Коэффициент тензочувствительности полупроводниковых тензорезисторов достигает значений КТ ≈ 50 – 200. основной недостаток полупроводниковых тензорезисторов – очень большие температурные погрешности.
Поскольку в преобразователях на основе тензорезисторов используются не реактивные (индуктивности или конденсаторы), а только активные (резисторы) компоненты, такие преобразователи обладают высоким быстродействием и могут использоваться для исследования быстропротекающих процессов.
Другие типы датчиков усилия
Кроме рассмотренных датчиков усилия существуют и другие типы датчиков имеющие ограниченное применение. Один из таких датчиков показан на рис. 144.
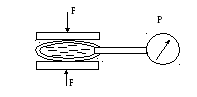
Рис. 144
Датчик усилия с использованием эластичной емкости с жидкостью.
В конструкцию датчика входит эластичная емкость, заполненная жидкостью, и манометр (датчик давления). При действии усилия F, передающегося на жидкость, давление в емкости увеличивается и по измерению величины давления определяется усилие. Точность измерения такого датчика ограничена, он имеет небольшой ресурс работы, а наличие жидкости усложняет применение.
Для измерения усилия можно использовать известное явление – изменение частоты собственных колебаний струны при изменении натяжения (рис. 145).
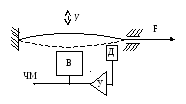
Рис.145
Струнный датчик усилия.
Известна зависимость частоты собственных колебаний (первого тона) натянутой струны от силы натяжения /9/
![]() (91)
(91)
Здесь l – длина струны, S – площадь поперечного сечения, ρ – плотность материала, E – модуль упругости материала, J – момент инерции сечения, i – номер тона колебаний, fi - частота i -го тона собственных колебаний струны.
Датчик содержит струну с приспособлением для натяжения, датчик (Д) отклонения струны от среднего положения (или скорости отклонения), усилитель (У) с необходимой амплитудно – фазовой характеристикой и устройство (В) возбуждения колебаний струны.
В системе состоящей из струны, датчика, усилителя и возбудителя при соблюдении определенных условий (баланс амплитуд и баланс фаз) возникают незатухающие колебания на собственной частоте натянутой струны. С выхода усилителя сигнал частотной модуляции может быть легко преобразован в цифровой сигнал.
Этот датчик имеет однотактную статическую характеристику, сложен по конструкции, не может измерять малые усилия, имеет ограниченный диапазон измеряемых усилий и поэтому редко применяется.