

Тема 5. Емкостный датчик перемещения
В емкостных датчиках используется зависимость электрического параметра - емкости конденсатора от механических и других факторов. Для плоского конденсатора с параллельными пластинами предположим, что поле равномерное и сосредоточено между пластинами (рис.57). При этом пренебрегаем полями рассеяния и выпучиванием поля на границах пластин (аналогично допущениям о характере магнитного поля при рассмотрении индуктивного датчика (рис.39, 40, 41)). В этом случае емкость конденсатора вычисляется по формуле
![]() , (45)
, (45)
где 0 = 8.85*10-12 Кл/(В*м) – диэлектрическая постоянная (диэлектрическая проницаемость вакуума),
- относительная диэлектрическая проницаемость среды,
S – площадь взаимного перекрытия пластин,
d – расстояние между пластинами.
Для получения информации о перемещении можно использовать изменение расстояния между пластинами, площади перекрытия пластин или изменение свойств среды /13/.
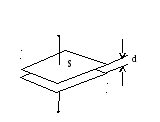
Рис. 57.
Плоский конденсатор.
Получение электрического выходного сигнала при изменении емкости конденсатора (что приводит к изменению реактивного сопротивления) можно обеспечить с помощью схем, аналогичным схемам, использованным в индуктивных датчиках (рис. 38, 44, 46).
Рассмотрим датчик уровня топлива в баке на основе емкостного датчика. В топливном баке вертикально установлен конденсатор, обкладками которого являются две концентрические тонкостенные трубки (рис. 58).
Емкость
цилиндрического конденсатора
![]() .
.
Здесь L – длина цилиндра, r1 и r2 – радиусы внешней и внутренней трубки соответственно.
Пространство между трубками до высоты Н занимает жидкость, а остальную часть воздух и пары жидкости. Жидкое авиационное топливо (керосин) имеет относительную диэлектрическую проницаемость Т ≈ 20, а
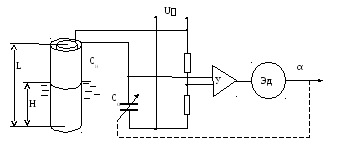
Рис. 58.
Система измерения уровня топлива с емкостным датчиком.
воздух В = 1. Таким образом, датчик представляет собой два параллельно включенных цилиндрических конденсатора: длиной Н с жидким диэлектриком (топливом) и длиной L-H c воздушным диэлектриком.
Суммарная емкость этих конденсаторов

линейно зависит от уровня топлива в баке Н.
Датчик включен в мостовую схему, в которой присутствует конденсатор переменной емкости Cα. Сигнал с диагонали моста через усилитель подается на двигатель, поворачивающий ротор конденсатора переменной емкости и постоянно балансирующий мост. В результате угол поворота ротора α конденсатора переменной емкости соответствует уровню топлива в баке.
Поскольку практический интерес представляет информация не об уровне топлива, а о количестве (объеме) топлива в баке, то для баков сложной формы используют датчики, у которых зависимость емкости СН от уровня топлива специально сделана нелинейной с таким расчетом, чтобы угол поворота ротора конденсатора переменной емкости соответствовал количеству топлива. Для этого в цилиндрических трубках (обкладках конденсатора) изготавливаются определенным образом рассчитанные вырезы, обеспечивающие необходимую нелинейность.
Основное достоинство емкостных датчиков – малая величина обратного воздействия, возможность измерения малых перемещений (до единиц и долей микрометра).
Основной недостаток – малая номинальная величина емкости (до сотен пикофарад), что требует применения повышенной частоты питания, увеличивает влияние паразитных емкостей (например, емкости монтажа) на процесс измерения.