

5. Принцип развертывающего уравновешивания
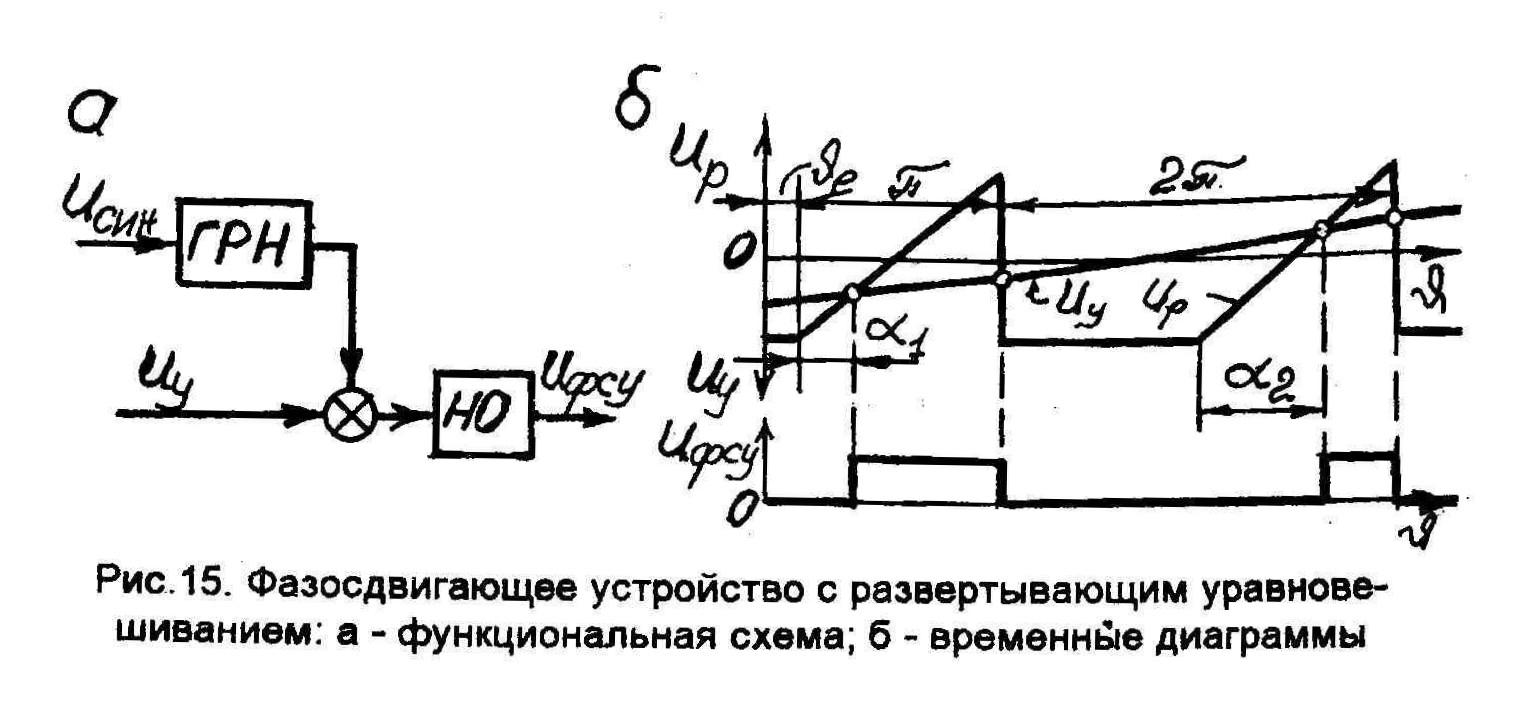
Для формирования углов управления с 70-х годов используется, в основном, принцип развертывающего уравновешивания, который часто называют принципом вертикального управления. До этого применялось много других принципов и схем: на основе пик-дросселей и пик-трансформаторов, диодно-емкостные, транзисторно-емкостные, c интегрированием напряжения управления, на магнитных усилителях и др. Принцип развертывающего уравновешивания основан на сравнении синхронизированного с сетью развертывающего напряжения с напряжением управления. В момент равенства суммы этих напряжений нулю или равенства одного другому формируется передний фронт управляющего импульса. Функциональная схема такого ФСУ приведена на рис.15,а. Синхронизирующее напряжение подается на вход генератора развертывающего напряжения ГРН, имеющего в данном случае пилообразную форму (рис.15,б).
Развертывающее
напряжение
![]() суммируется с напряжением управления
и, когда их сумма переходит через нуль
суммируется с напряжением управления
и, когда их сумма переходит через нуль
![]() , (15)
, (15)
нуль-орган НО
формирует передний фронт выходного
напряжения фазосдвигающего устройства
![]() и в конечном итоге управляющий импульс.
Развертывающее напряжение изменяется
по требуемому закону (в данном случае
по линейному), начиная с момента
естественной коммутации управляемого
тиристора
и в конечном итоге управляющий импульс.
Развертывающее напряжение изменяется
по требуемому закону (в данном случае
по линейному), начиная с момента
естественной коммутации управляемого
тиристора![]() .
С этого момента отсчитывается и угол
управления. Для того чтобы легко находить
момент равенства суммы напряжений нулю,
следует на временной диаграмме
развертывающего напряжения нанести и
напряжение управления, но его положительную
величину откладывать вниз от оси времени.
Точка пересечения этих кривых соответствует
равенству нулю их суммы, например при
.
С этого момента отсчитывается и угол
управления. Для того чтобы легко находить
момент равенства суммы напряжений нулю,
следует на временной диаграмме
развертывающего напряжения нанести и
напряжение управления, но его положительную
величину откладывать вниз от оси времени.
Точка пересечения этих кривых соответствует
равенству нулю их суммы, например при![]() В и
В и![]() В. Длительность импульса ФСУ принципиальной
роли не играет. Развертывающее напряжение
часто называют опорным или по его форме:
линейным, пилообразным, косинусоидальным,
синусоидальным и т.д. Иногда вместо
нуль-органа ставят компаратор, и угол
управления формируется в моментравенства
напряжений управления и развертки.
В. Длительность импульса ФСУ принципиальной
роли не играет. Развертывающее напряжение
часто называют опорным или по его форме:
линейным, пилообразным, косинусоидальным,
синусоидальным и т.д. Иногда вместо
нуль-органа ставят компаратор, и угол
управления формируется в моментравенства
напряжений управления и развертки.
6. Ячейка фсу с пилообразным развертывающим напряжением
Принципиальная
схема ЯФСУ с пилоообразным развертывающим
напряжением приведена на рис.16,а, принцип
работы поясняется временными диаграммами
на рис.16,б. На верхней диаграмме показана
ЭДС фазы а,
которая подводится к рассматриваемому
тиристору. Ниже приведено синхронизирующее
напряжение (для трехфазной мостовой
схемы оно отстает от ЭДС, подводимой к
тиристорам, на 210°
с учетом групп соединения трансформаторов
и фазового сдвига в ФСН). На рис.6 это
напряжение обозначено
![]() .
Синхронизирующее напряжение переходит
через нуль в момент естественной
коммутации. При положительном напряжении
синхронизации транзистор VT1 открыт, он
шунтирует операционный усилитель DA1 и
его выходное пилообразное напряжение
.
Синхронизирующее напряжение переходит
через нуль в момент естественной
коммутации. При положительном напряжении
синхронизации транзистор VT1 открыт, он
шунтирует операционный усилитель DA1 и
его выходное пилообразное напряжение![]() .
Резистор
.
Резистор![]() ,
по которому протекает ток базы, может
являться резистором фильтра, например
,
по которому протекает ток базы, может
являться резистором фильтра, например![]()
![]() на рис.7,а, или нагрузкой фильтра, которую
иногда необходимо учитывать при его
расчете.
на рис.7,а, или нагрузкой фильтра, которую
иногда необходимо учитывать при его
расчете.
При отрицательном
напряжении синхронизации транзистор
закрыт и операционный усилитель
интегрирует отрицательное стабилизированное
напряжение
![]() .
Его выходное напряжение нарастает по
прямой линии от нуля до максимума.
Скорость нарастания напряжения
.
Его выходное напряжение нарастает по
прямой линии от нуля до максимума.
Скорость нарастания напряжения![]() пропорциональна
пропорциональна![]() .
Для получения желаемой регулировочной
характеристики из пилообразного
напряжения на входе второго операционного
усилителя DA2 вычитается напряжение
смещения и получается развертывающее
напряжение, у которого в случае линейного
согласования максимум и минимум равны
по абсолютной величине. Такое развертывающее
напряжение можно получить и без напряжения
смещения [5, с 197]. Операционный усилитель
DA2 выполняет роль нуль-органа. Он не
охвачен обратной связью. Сумма напряжений
подается на прямой вход. Если сопротивления
входных резисторов равны
.
Для получения желаемой регулировочной
характеристики из пилообразного
напряжения на входе второго операционного
усилителя DA2 вычитается напряжение
смещения и получается развертывающее
напряжение, у которого в случае линейного
согласования максимум и минимум равны
по абсолютной величине. Такое развертывающее
напряжение можно получить и без напряжения
смещения [5, с 197]. Операционный усилитель
DA2 выполняет роль нуль-органа. Он не
охвачен обратной связью. Сумма напряжений
подается на прямой вход. Если сопротивления
входных резисторов равны![]() =
=![]() =
=![]() ,
то при сумме напряжений, превышающей
несколько милливольт, на выходе
нуль-органа получается максимальное
напряжение того же знака. Положительный
фронт задает момент открывания тиристора.
Строго говоря, на входе операционного
усилителя суммируются не напряжения ,
а токи, и в общем случае скачок выходного
напряжения происходит в момент, когда
,
то при сумме напряжений, превышающей
несколько милливольт, на выходе
нуль-органа получается максимальное
напряжение того же знака. Положительный
фронт задает момент открывания тиристора.
Строго говоря, на входе операционного
усилителя суммируются не напряжения ,
а токи, и в общем случае скачок выходного
напряжения происходит в момент, когда
![]() .
(16)
.
(16)
В данной схеме суммирование производится на прямом входе операционного усилителя. Инверсный вход соединен с общей точкой схемы. Если сделать наоборот, то в момент положительного перехода суммы напряжений (токов) через нуль будет формироваться не положительный, а отрицательный фронт, что принципиального значения не имеет.

При любом
согласовании углов управления при
![]() =0
угол управления должен быть равен
=0
угол управления должен быть равен![]() [9, 11]. Следовательно, при
[9, 11]. Следовательно, при![]() развертывающее напряжение должно быть
равно нулю. Для этого его неоходимо
сместить вниз вычитанием напряжения
смещения
развертывающее напряжение должно быть
равно нулю. Для этого его неоходимо
сместить вниз вычитанием напряжения
смещения![]() .
Как следует из временной диаграммы
(рис.16,б), углуa=p
соответствует
.
Как следует из временной диаграммы
(рис.16,б), углуa=p
соответствует
![]() ,
а углу
,
а углу![]() соответствует
соответствует![]() .
Откуда
.
Откуда
![]() . (17)
. (17)
Если равенство
всех входных резисторов DA1 не соблюдается,
то следует перейти к токам и вместо
требуемого напряжения смещения можно
использовать произвольное отрицательное
стабилизированное напряжение
![]() .
Выражая углы в градусах, получим
.
Выражая углы в градусах, получим
![]() . (18)
. (18)
Найдем параметры интегратора. Максимум пилообразного напряжения принимают на 2...5 В меньше напряжения питания операционного усилителя. Во время заряда напряжение на конденсаторе (пилообразное напряжение) изменяется по уравнению
![]() . (19)
. (19)
Ток заряда
![]() .
Конденсатор заряжается до напряжения
.
Конденсатор заряжается до напряжения![]() за время, равное полупериоду напряжения
сети. Если проинтегрировать (19), учитываяя,
что длительность полупериода равна
1/2
за время, равное полупериоду напряжения
сети. Если проинтегрировать (19), учитываяя,
что длительность полупериода равна
1/2![]() ,
где
,
где![]() - частота сети, Гц, то мы получим
- частота сети, Гц, то мы получим![]() .
Обычно задаются емкостью в микрофарадах.
Тогда при частоте сети 50 Гц сопротивление
в килоомах
.
Обычно задаются емкостью в микрофарадах.
Тогда при частоте сети 50 Гц сопротивление
в килоомах
![]() . (20)
. (20)
Например, при
![]() =0,5 мкФ и равенстве напряжений получаем
=0,5 мкФ и равенстве напряжений получаем![]() =20
кОм.
=20
кОм.
Сопротивление
![]() находится исходя из длительности разряда
находится исходя из длительности разряда![]() (порядка 0,2 мс) конденсатора
(порядка 0,2 мс) конденсатора![]() с учетом падения напряжения база -
эмиттер и продолжающегося заряда
с учетом падения напряжения база -
эмиттер и продолжающегося заряда![]() током резистора
током резистора![]() .
Транзистор должен быть выбран по
напряжению и току. Часто используются
транзисторы типа КТ315.
.
Транзистор должен быть выбран по
напряжению и току. Часто используются
транзисторы типа КТ315.
Фазовая
характеристика, если пренебречь
ограничениями, проходит через точки
(рис.16,б) a=0,
![]() и
и![]()
![]() ,
,![]() .
На рис.16 и далее используются напряжения
управления и ЭДС, выраженные в относительных
единицах
.
На рис.16 и далее используются напряжения
управления и ЭДС, выраженные в относительных
единицах![]() и
и![]() .
Тогда аналитическое выражение фазовой
характеристики, справедливое в пределах
ограничений, имеет вид
.
Тогда аналитическое выражение фазовой
характеристики, справедливое в пределах
ограничений, имеет вид
![]() (21)
(21)
которое справедливо в пределах ограничений. Регулировочная характеристика в режиме непрерывного тока
![]() (22)
(22)
получается нелинейной. (рис.17,г).
В несимметричных
преобразователях в режиме непрерывного
тока
![]() и
и![]() =0
приa=p.
Для того, чтобы при
=0
приa=p.
Для того, чтобы при
![]() =0
получить
=0
получить![]() =0,
необходимо принять
=0,
необходимо принять![]() .
При этом изменяются фазовая и регулировочная
характеристики.
.
При этом изменяются фазовая и регулировочная
характеристики.
Достоинством
рассмотренного ФСУ является то, что
развертывающее напряжение не зависит
от формы и амплитуды напряжения сети и
имеет неизменную производную. Это
обеспечивает достаточно точное
формирование углов управления. Однако
отклонения параметров элементов и
частоты напряжения сети приводят к
погрешностям. Схема настраивается на
определеную частоту и при другой
(например 60 Гц) изменятся коэффициент
передачи,
![]() ,
,![]() .
.