

Лекция 10. Судовая мпсу "Data chief-c20"
Технические средства автоматизации СЭУ непрерывно совершенствуются. Показательным в этом смысле является процесс смены поколений МПСУ на примере продукции одного из лидеров в области автоматизации судового энергетического оборудования – норвежской фирмы Kongsberg Norcontrol.
С начала 2000-х годов вместо системы "Data chief-7" (80-е годы) и ее улучшенного варианта "Data chief-2000" (90-е годы) на суда устанавливается МПСУ нового поколения "Data chief-С20" (сокращенно – "DC-С20"). По сравнению с предшествующими системами она имеет ряд существенных отличий.
В зависимости от предъявляемых требований к уровню автоматизации, система DC-С20 может поставляться на суда в различных вариантах и различном объеме – от минимального, выполняющего только функции СЦК (Alarm And Monitoring System), до полномасштабного, обеспечивающего комплексное управление всеми техническими средствами судна, включая энергетическую установку, пропульсивный комплекс, грузовую систему танкера и др. Ниже рассматривается базовый вариант системы DC-С20, обеспечивающий управление оборудованием СЭУ и функции СЦК (Alarm, Monitoring and Control System) (рис. 1).
Система комплектуется из блоков четырех основных типов:
блоков распределенной обработки данных (Distributed Process Unit – DPU);
местных станций управления (Local Operator Station – LOS);
станций дистанционного управления (Remote Operator Station - ROS);
блоков сигнализации и вызова вахтенного, расположенных в каютах и местах пребывания экипажа (Watch Cabin Unit – WCU) и на ходовом мостике (Watch Bridge Unit – WBU).
Все эти блоки технически реализованы в виде компьютеров, объединенных в локальную вычислительную сеть через шину типа CAN – "Controller Area Network".
Станция дистанционного управления (ROS) является основным постом управления СЭУ. Для обеспечения надежности используются две станции ROS, объединенные линией связи в отдельную ЛВС (LAN).
В состав ROS входят:
основной компьютерный блок MCU (Main Computer Unit);
цветной монитор;
панель управления OCP 8810 (Operator Control Panel);
принтер;
источник бесперебойного питания UPS (Uninterruptible Power Source).
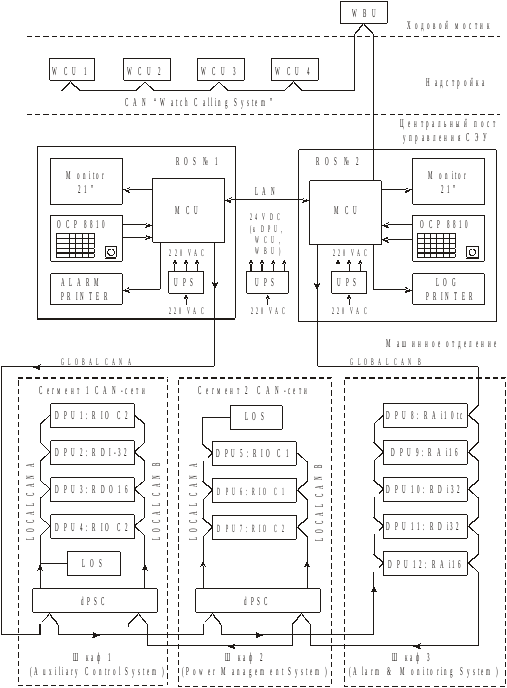
Рис. 1. Схема МПСУ "Data chief-С20"
Блок MCU по комплектации аналогичен персональному компьютеру (РС).
Панель управления OCP содержит клавиатуру, трекбол и элементы сигнализации. Этот блок аналогичен блоку OCP, используемому в МПСУ "Data chief-7/2000". Блок питания UPS обеспечивает переменным питающим напряжением 220 В (220 VAC) блоки ROS. При исчезновении входного питающего напряжения переменного тока 220 В, он преобразует постоянное напряжение встроенного в него аккумулятора в переменное 220 VAC, обеспечивая, тем самым, бесперебойное питание.
Для обеспечения безвахтенного обслуживания СЭУ система DC-С20 укомплектована блоками сигнализации и вызова вахтенного (WCU), расположенными в каютах механиков и местах нахождения членов машинной команды. Блок WCU выполнен на основе жидкокристаллического цифрового дисплея). Эти блоки, а также блок аналогичного назначения, расположенный на ходовом мостике (WВU) объединены в отдельную локальную CAN –сеть, подключенную к ROS №2, образуя систему вызова вахтенного – "Watch Calling System". Эта часть оборудования обеспечивает функции СЦК.
Блоки DPU являются наиболее многочисленным компонентом системы DC-С20. Они являются управляющими ЭВМ, непосредственно воспринимающими сигналы датчиков, обрабатывающие их в соответствии с заложенным в их программу алгоритмом работы и формирующими выходные управляющие воздействия. Имеется более 10 типов блоков DPU, каждый их которых специализирован под конкретные типы входных и выходных сигналов.
В отличие от управляющих ЭВМ, использованных в системах "Data chief-7/2000", блоки DPU не имеют собственной панели управления и поэтому автономно функционировать не могут, только в составе системы. Общими отличительными особенностями блоков DPU являются:
отсутствие органов настройки, обслуживаемых в эксплуатации и сменных компонентов (в эксплуатационных условиях блоки DPU не ремонтируются);
все настроечные параметры изначально записаны в модуль и могут быть изменены только программным путем, через локальную сеть;
каждый модуль DPU имеет два порта для подключения к двум независимым CAN-сетям, а также дополнительный последовательный интерфейс RS422 или RS485;
состояние модуля, входные и выходные сигналы, режимы его работы индицируются светодиодами (LED);
обеспечивается самодиагностика.
Блоки DPU объединены в систему и связаны с ROS через CAN-сеть. Для обеспечения надежности это подключение реализовано в виде двух независимых сетей (рис. 1) – GLOBAL CAN A, замыкающейся на ROS №1, и GLOBAL CAN B, замыкающейся на ROS №2. Каждый блок DPU в своем программном обеспечении содержит адрес и другую информацию, необходимую для его идентификации. Когда блок DPU физически подключается к сети, например, взамен отказавшего, программа, работающая в ROS, по этой информации автоматически его распознает. таким образом, от обслуживающего персонала не требуется никаких специальных действий по вводу блока в действие, достаточно лишь указать его номер. Данный принцип в компьютерной технике именуется "plug and play" – подключай и работай. Питание блоков DPU, а также WCU и WВU осуществляется напряжением 24 В постоянного тока (24 VDC) от блока бесперебойного питания UPS (рис. 1).
Через CAN-сеть станции ROS получают информацию от блоков DPU, передают в них команды управления оборудованием, осуществляют изменение их настроечных параметров, калибровку и т.д. Программное обеспечение станции ROS контролирует связь через сеть с каждым DPU и при ее потере формирует сообщение о неисправности.
Каждый блок DPU также имеет средства самоконтроля – контролируется температура внутри блока, работоспособность его запоминающего устройства, состояние CAN-сети. Кроме этого, каждый блок DPU имеет так называемый "сторожевой таймер" - "Watch Dog Timer (WDT)". Это отдельное устройство в составе DPU, контролирующее его общую работоспособность. Пока управляющая программа в блоке DPU работает правильно, она периодически подает импульсы в WDT, удерживающие его в исходном состоянии. Если в управляющей программе DPU произошел сбой, эти импульсы прекращают поступать в WDT и по прошествии определенного времени WDT срабатывает. При этом он формирует сигнал сброса (reset), останавливающий микроЭВМ блока DPU. Это предотвращает появление и развитие опасных ситуаций в системе управления, где используется блок DPU. Срабатывание WDT сигнализируется светодиодом.
В условиях судна блоки DPU сгруппированы в шкафах по функциональному признаку, обеспечивая в составе DC-C20 функции ряда локальных систем автоматизации (см. рис. 1):
система автоматизации вспомогательного оборудования (Auxiliary Control System) – насосы, компрессоры и др.;
система автоматизации судовой электростанции (Power Management System) – дизель-генераторы, валогенератор;
система централизованного контроля (Alarm and Monitoring System) и др.
Для реализации функций этих систем используются соответствующие типы блоков DPU. Ряд таких подсистем могут функционировать и самостоятельно, без связи со станцией ROS. В этом случае они дополнительно комплектуются местными станциями управления (LOS) (рис. 1).
С помощью станций LOS, которые при наличии ROS рассматриваются как дополнительные, резервные панели управления, могут выполняться операции по управлению оборудованием, наблюдению за процессами, настройке параметров блоков DPU, имитации их входных и выходных сигналов, проверке диагностических сообщений и др.
Блоки DPU, сгруппированные по видам подсистем автоматизации, подключаются к общей CAN-сети (глобальной – Global) не напрямую, а через блоки расширения типа dpsc (см. рис. 1). Тем самым в пределах подсистемы, шкафа образуется местная, локальная CAN-сеть (Local CAN), являющаяся сегментом общей сети. Необходимо отметить, что на рис. 1 представлены лишь типы блоков DPU, которыми комплектуются подсистемы. Конкретное же их количество определяется объемом автоматизации конкретного судна и значительно превышает представленное на рис. 1.
Ниже дана краткая характеристика некоторых типов блоков DPU:
RAI-16 (Remote Analogue Input) – блок ввода 16 аналоговых сигналов;
RDI-32 (Remote Digital Input) – блок ввода 32 дискретных входных сигналов от контактных датчиков;
RDI-32A (Remote Digital Input) – блок ввода 32 дискретных сигналов переменного тока или постоянного тока 24 В;
RAI-10tc (Remote Analogue Input) – блок ввода 10 сигналов от термопар;
RDO-16 (Remote Digital Output) – блок вывода 16 дискретных, формируемых с помощью реле сигналов, имеется выход импульсного сигнала;
RAO-8 (Remote Analogue Output) – блок вывода 8 аналоговых сигналов в диапазоне 10 В или 0…20 мА;
RIO-C1 (Remote Input/Output) – многоцелевой комбинированный блок ввода/вывода входных/выходных сигналов, в том числе: 6 выходных дискретных сигналов; 2 входных импульсных сигнала; 2 входных сигнала 0…30 VAC и один входной сигнал 0…1 А переменного тока; 4 аналоговых или дискретных входных сигнала и др.;
RIO-C2 (Remote Input/Output) – комбинированный блок ввода 8 дискретных и вывода 8 дискретных сигналов.
Блоки типов RAI и RDI используются в основном для реализации функций СЦК (рис. 1).
Для управления вспомогательными механизмами и дизель-генераторами используются блоки типов RIO-C2 и RIO-C1 (рис. 1). В частности, блок RIO-C2 применяется для управления насосами, клапанами, пуска, остановки и защиты дизель-генератора и т.д. Через блок RIO-C1 обеспечивается управление автоматическими выключателями генераторов, синхронизация подключаемого генератора, он способен выполнять функции ПИД-регулятора и т.д.
Алгоритмы обработки сигналов в блоках DPU реализованы в виде программ, работающих в этих блоках, и определяются их функциональным назначением. Так, например, обработка поступающих от датчиков аналоговых сигналов в блоке RAI-16 предусматривает выполнение следующих операций:
преобразование в АЦП аналогового сигнала в 16-разрядный цифровой код;
фильтрацию этого сигнала в фильтре нижних частот второго порядка (Баттерворта), фильтр реализован в виде расчетной формулы;
преобразование цифрового сигнала к диапазону входного параметра, выраженному в физических единицах или в процентах;
расчет скорости изменения параметра;
сравнение измеренного значения с четырьмя заданными значениями уставок на сигнализацию: LL (Low Low) – предельно низкое, L (Low) – низкое, H (High) – высокое, HH (High High) – предельно высокое и формирование временных задержек сигнализации;
формирование и ведение хронологической записи сигналов тревоги;
проверка достоверности входного сигнала с формированием сообщения об ошибке, если он более чем на 5 % вышел за верхний или нижний предел диапазона, в котором должен находиться;
и др.
Фирмой Kongsberg разработана также МПСУ "Auto chief–C20", по сравнению с МПСУ "Auto chief–4" являющаяся новым поколением системы дистанционного автоматизированного управления (ДАУ) главным судовым двигателем (МОД). В ней реализованы те же основные принципы построения, что и в системе DC-C20 – блоки DPU, CAN-сеть и др.