

Конспект лекций по КМР
.pdfТ а б л и ц а 1.4.
Группы движений звеньев исполнительного механизма
Движения |
Группа |
Вид соедине- |
Схема соединения звеньев |
|
звеньев |
движения |
ния звеньев |
||
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
А |
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
В |
|
|
|
|
|
|
||
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
С |
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
|
А |
1 |
|
|
|
|
|
|
42
Три угловых движения, осуществляющих пространственную ориентацию рабочего органа, можно также представить в виде двух элементарных групп движений:
группа С – сферическое движение рабочего органа относительно точки (осуществляют с помощью двух звеньев 4 и 5 и двух кинематических пар IV и V 5-го класса, табл. 1.4);
группа Д – вращение (ротация) рабочего органа 6 относительно своей продольной оси (осуществляют с помощью одной вращательной кинематической пары VI 5-го класса, табл. 1.4).
Основная структурная схема (ОСС) исполнительного механизма может быть получена соединением элементарных групп в следующей последовательности:
OCC = Ai + Bj + Ck + Д,
где i, j, k – номер вида элементарной структурной группы A, B, C соответственно.
Пример 1.5. Синтезировать основную пространственную структурную схему исполнительного механизма робота с 6 степенями подвижности по следующим данным: i=1, j=1, k=2.
Строим основную структурную схему путем соединения элементарных групп в следующей последовательности (рис. 1.34)
ОСС = Аi + Вj + Сk + Д = А1 + В1 + С2 + Д. Вычисляем число степеней
подвижности исполнительного механизма:
5
W6n iPi
i1
6 6 5 6
6
.
|
Число степеней подвижности |
|
структурной группы, соединяю- |
|
щей рабочий орган со стойкой: |
|
5 |
Рис. 1.34 |
Wãð 6nãð iPi 6 5 5 6 0. |
i 1
Синтез структурных схем с замкнутыми контурами. Число по-
движных звеньев и кинематических пар, удовлетворяющих требуемому числу степеней подвижности W, виду кинематических пар i и числу замкнутых контуров К исполнительного механизма находят по формуле:
|
5 |
K |
|
|
|
|
W iPi S j |
|
|
||
n |
|
i 1 |
j 1 |
. |
(1.15) |
|
|
|
|||
|
|
6 |
|||
|
|
|
|
|
|
43

Структурная схема исполнительного механизма с замкнутыми контурами может быть получена присоединением к звеньям основной структурной схемы структурных групп звеньев с избыточными связями или с дополнительными подвижностями, образованных на основании формулы (1.4) при WП 0 :
|
5 |
i |
|
j |
5 |
i |
|
j |
|
5 |
|
|
S |
|
H |
|
i |
||||
|
|
( i 2)P |
|
|
(i - 3)P |
|
2 |
P |
||
n |
i 3 |
|
|
|
i 3 |
|
|
|
|
i 3 |
r |
|
3 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|
|
.
При этом кинематическая цепь звеньев основной структурной схемы не должна изменять своего числа степеней подвижности.
Пример 1.6. Синтезировать пространственную структурную схему исполнительного механизма с тремя степенями подвижности, содержащую кинематические пары четвертого и пятого классов, и имеющую один замкнутый контур с одной дополнительной подвижностью.
Определяем число избыточных связей структурной группы звеньев, образующей замкнутый контур:
S j 3 H j 3 1 2.
Вычисляем число подвижных звеньев и кинематических пар структурной схемы исполнительного механизма:
|
|
5 |
i |
|
K |
|
j |
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
||
|
|
iP |
|
S |
|
|
3 |
4 2 |
5 3 2 |
||
n |
|
i 1 |
|
|
j 1 |
|
|
|
|||
|
|
6 |
|
|
|
|
|
|
6 |
||
|
|
|
|
|
|
|
|
|
|
4
.
Структурная схема исполнительного механизма должна содержать четыре звена (n=4), две кинематические пары четвертого класса ( P4 2 ) и три кинематические пары пятого класса ( P5 3).
Pr4
Находим и пятого
число звеньев nr и кинематических пар четвертого
Pr5 |
классов структурной группы звеньев с дополни- |
тельными подвижностями при помощи которой строим замкнутый контур исполнительного механизма:
|
|
5 |
i |
|
j |
|
|
|
|
|
|
|
S |
|
|
|
|
||
|
|
|
( i 2)P |
|
|
4 |
2 1 5 2 2 2 |
|
|
nr |
|
i 3 |
|
|
|
|
2 . |
||
|
|
|
|
|
|||||
|
3 |
|
|
|
3 |
||||
|
|
|
|
|
|
|
|
Группа должна содержать два звена ( nr 2 ), одну кинематиче-
скую пару четвертого класса ( Pr4 1 ) и две кинематические пары пятого класса ( Pr5 2).
44

Определяем число звеньев |
n0 |
и кинематических пар |
основной структурной схемы исполнительного механизма:
P04
и
P05
n |
|
0 |
|
P04 |
|
P |
|
05 |
|
Строим структурную
(рис. 1.35, а).
n n |
|
|
r |
P4 Pr4 |
|
P |
P |
5 |
r5 |
схему
4
2 2; |
|
2 1 |
1; |
3 2 |
1. |
исполнительного механизма
а) |
б) |
Рис. 1.35
Для проверки правильности решения примера вычисляем число степеней подвижности исполнительного механизма:
W
5 K
6n iPi S j
i1 j 1
6 4 4 2 5 3 2
3
.
Таким образом, структурная схема исполнительного механизма синтезирована правильно.
Для получения структурной схемы исполнительного механизма
без избыточных контурных связей |
S j 0 |
( H j 3 ) необходимо по- |
низить класс некоторых кинематических пар группы звеньев, образующей замкнутый контур. Заменяем одну кинематическую пару B5 пятого класса кинематической парой B3 третьего класса
(рис. 1.35, б).
Находим число степеней подвижности исполнительного механизма:
W 6 4 3 1 4 2 5 2 3.
45

Глава 2 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РОБОТОВ
2.1.Геометрические характеристики
Кгеометрическим характеристикам роботов относят: рабочее пространство, рабочую зону, зону обслуживания, достижимость, маневренность, манипулятивность, объем движения.
Рабочее пространство – множество точек, с которыми может совпадать хотя бы одна точка исполнительного устройства робота.
Рабочая зона – подмножество точек рабочего пространства, с которыми может совпадать конечная точка исполнительного устройства при его функционировании.
Зона обслуживания – часть рабочей зоны, в которой рабочий орган исполнительного устройства выполняет заданные функции. Типовые формы зон обслуживания приведены в табл. 2.1.
Т а б л и ц а 2.1
Типовые формы зон обслуживания
Система координат
Декартова (прямоугольная) Полярная и угловая (ангулярная)
плоская пространственная плоская цилиндрическая сферическая
Достижимость – способность рабочего органа исполнительного устройства робота попасть в заданную наиболее удаленную от начала базовой системы координат (БСК) точку C:
D |
x2 |
y2 |
|
c |
c |
z 2 c
,
(2.1)
где xc, yc, zc – координаты точки C.
Маневренность – способность групп звеньев исполнительного механизма робота поворачиваться вокруг одной или нескольких осей, проходящих через центры сферических кинематических пар при фиксированном положении рабочего органа и заданном направлении его подхода к выбранной точке зоны обслуживания
(рис. 2.1).
Маневренность определяют по формуле:
45

WM
|
5 |
i |
6n |
|
|
|
iP |
|
|
i 1 |
|
H
,
(2.2)
где n ґ=(n–1) – число подвижных звеньев исполнительного механизма без учета последнего звена; Н – число местных подвижностей звеньев (возможность поворота звеньев вокруг своих продольных осей).
Для механизма, изображенного на рис. 2.1, маневренность равна:
WM = 6 2 — 3 3 – 2 = 1.
Рис. 2.1 |
Маневренность равная |
|
единице означает групповую подвижность звеньев 1 и 2 вокруг одной оси АС, проходящей через центры сферических пар А и С и обеспечивает подход рабочего органа к точке Е в заданном направлении N-N при любом положении группы звеньев 1 и 2, полученном в результате их поворота вокруг оси АС. Два таких положения звеньев АВґ'С и АВ"ґС показаны на рис. 2.1 пунктирными линиями.
Маневренность равная m означает подвижность m групп звеньев исполнительного механизма вокруг m осей, проходящих через центры сферических кинематических пар, и обеспечивает подход рабочего органа к заданной точке в выбранном направлении при любом положении этих групп.
Манипулятивность – способность исполнительного устройства робота ориентировать рабочий орган требуемым образом в заданных точках рабочей зоны.
Количественной оценкой манипулятивности являются угол и коэффициент сервиса.
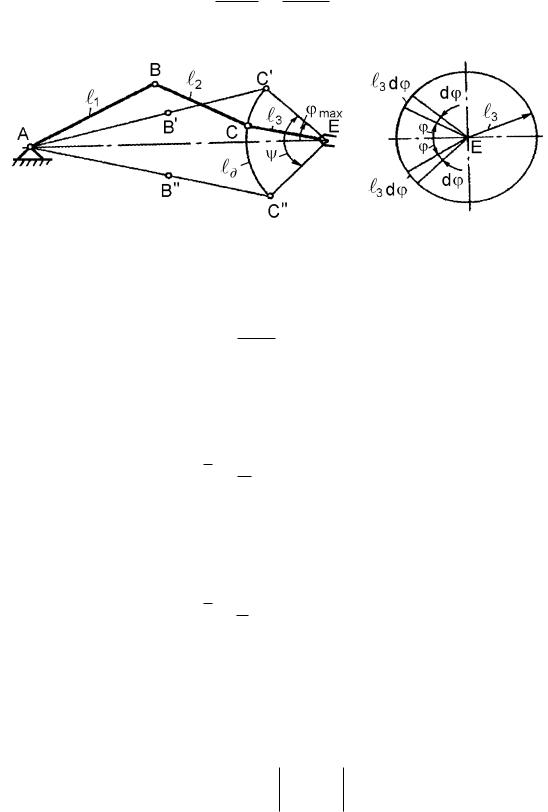
Угол сервиса – телесный угол, внутри которого может находиться ось ЕС рабочего органа при его подходе к заданной точке Е зоны обслуживания (рис. 2.2). При этом точка С опишет шаровой сегмент радиуса
R = EC = 3.
Угол сервиса (ср) определяют в виде отношения площади Sшс шарового сегмента, вырезанного телесным углом, к квадрату радиуса сферы:
|
Sщc |
. |
(2.3) |
2 |
3
46

Площадь шарового сегмента (рис. 2.3) равна:
|
|
|
|
max |
|
max |
||
|
|
|
|
|
||||
S |
шс |
|
|
|
2 y d |
|
|
2 2sin d |
|
|
|
3 |
|
3 |
|||
|
|
|
|
0 |
|
|
0 |
|
2 2 3
(1
cos |
max |
) |
|
|
.
Тогда угол сервиса будет равен:
2 (1
cos |
max |
) |
|
|
.
(2.4)
Если точка С описывает фигуру, отличную от шарового сегмента, то ее площадь находят по соответствующим зависимостям.
Рис. 2.2 |
Рис. 2.3 |
В предельном случае при та равна площади шара:
max
180
площадь шарового сегмен-
lim S |
|
2 |
2 |
|
||
щc |
(1 |
cos180 ) 4 |
||||
|
|
|
|
3 |
|
|
|
max |
180 |
|
|
|
|
|
|
|
|
|
|
|
2 3
Sш
.
В этом случае угол сервиса приобретает максимальное значение:
|
|
max |
|
S |
4 . |
|
|||
|
|
ш |
(2.5) |
||||||
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
Коэффициент сервиса в точке – отношение угла сервиса к пол- |
|||||||||
ному телесному углу: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 cos max |
. |
(2.6) |
||
max |
|
||||||||
|
|
|
|
|
2 |
|
|
||
Так как
0 max
180
,
то величина коэффициента сервиса
может изменяться от нуля, для точек на границе рабочего пространства, где рабочий орган может быть подведен к заданной точке в одном направлении, до единицы, для точек зоны полного сервиса, где рабочий орган может быть подведен к заданной точке в любом направлении, т.е. 0 1.
47

Среднее значение коэффициента сервиса в зоне обслуживания робота объемом V называют полным коэффициентом сервиса:
|
1 |
|
V |
||
|
dV V
.
(2.7)
Для конечного количества заданных точек n, в которых определялся коэффициент сервиса, полный коэффициент сервиса равен:
|
|
|
1 |
n |
|
|
|
|
|
|
|
|
|
|
|
||
|
i |
. |
(2.8) |
|||||
|
|
|||||||
|
|
|
n i 1 |
|
|
|||
|
|
|
|
|
|
|||
Полный коэффициент сервиса дает возможность качественной оценки кинематических свойств исполнительного механизма в целом.
Оценка кинематических свойств при помощи коэффициента сервиса позволяет выбрать рациональный вариант структурной схемы исполнительного механизма. Эта задача сводится к выбору длин звеньев исполнительного механизма, вида и расположения кинематических пар, при которых значения достигают максимума.
В плоских исполнительных механизмах угол сервиса – это плоский угол, внутри которого может находиться ось рабочего органа при его подходе к заданной точке зоны обслуживания (рис.
2.4). |
|
|
Угол сервиса (рад) равен отношению длины дуги |
|
окружно- |
сти, описываемой конечной точкой С рабочего органа, к радиусу
3 окружности: |
|
|
|
|
|
|
|
|
|
|
. |
(2.9) |
||
|
||||
|
|
|
||
|
3 |
|
|
Длина дуги окружности (рис. 2.5) равна:
|
|
|
|
max |
|
max |
|
|
|
|
|
|
|
|
|||
|
|
|
|
3 |
|
3 |
||
|
|
|
|
d 2 |
|
d 2 |
||
|
|
|
|
max |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
max |
3 |
.
Тогда
2 max . |
(2.10) |
В предельном случае при окружности:
|
max |
|
|
|
длина дуги равна длине
lim |
2 |
|
|
окр |
. |
|
|
3 |
|
|
|
max |
|
|
|
|
|
48
В этом случае угол сервиса будет максимальным:
max |
|
|
2 |
|
2 . |
окр |
|
3 |
|||
|
|
|
|||
|
|
|
|
||
|
3 |
|
|
3 |
|
(2.11)
Рис. 2.4 |
Рис. 2.5 |
Коэффициент сервиса:
|
|
|
|
||
|
||
|
max |
max
.
(2.12)
Так как |
0 max , то коэффициент сервиса находится в пре- |
делах 0 1.
Полный коэффициент сервиса:
|
1 |
|
dS , |
(2.13) |
|
S |
|||||
|
|||||
|
S |
|
|
||
|
|
|
|
где S – площадь зоны обслуживания роботом.
Для конечного числа n заданных точек, в которых определялся коэффициент сервиса, полный коэффициент сервиса равен:
1 n
n i
i 1
.
(2.14)
Объем движения – суммарное изменение обобщенных координат qi(L) исполнительного устройства робота при движении рабочего органа вдоль заданной траектории L(x, y, z) из точки С1 в точку
С2 (рис. 2.6):
n |
Lmax |
|
|
||
V |
|
dqi ( L ) |
dL . |
(2.15) |
|
dL |
|||||
i 1 |
0 |
|
|
||
|
|
|
|||
49

Рис. 2.6
2.2. Точностные характеристики
Погрешность позиционирования – отклонение положения харак-
теристической рабочей точки (ХРТ) С рабочего органа исполнительного устройства робота от значения, заданного управляющей программой.
Вектор погрешности позиционирования определяют в виде:
где
rc
|
|
m |
|
|
|
|
|
|
|
|
rc |
|
|||||
r |
|
|
W |
i |
||||
|
|
|||||||
c |
|
|
|
|
|
|
||
|
|
i 1 |
|
Wi |
|
|||
n |
r |
|
|
|
|
|
c |
q |
j |
, |
(2.16) |
|
|||||
|
|
|
|
|
|
j 1 |
qj |
|
|
|
|
– радиус-вектор ХРТ С рабочего органа теоретической (рас-
четной) схемы исполнительного устройства робота; Wi – функция геометрических (линейных и угловых) параметров i-го звена; Wi – вектор геометрических (линейных и угловых) ошибок i-го звена; qj
– обобщенная координата j-й степени подвижности; |
qj |
грешность j-й обобщенной координаты.
Более подробно с погрешностью позиционирования можно ознакомиться в главе 7.
– по-
робота
50