

№ 1 Основные элементы САУ
САУ - динамическая система, обладающая свойствами сохранять требуемую функциональную связь между некоторыми, описывающими ее поведение величинами путем сравнения функций этих величин и использования полученных разностей для управления источниками энергии.
В качестве величин, характеризующих состояние САУ, могут служить заданное (управляющее) и действительное значение регулируемой величины.
Регулируемой величиной называется физическая величина, которой необходимо управлять.
Управляющей называется физическая величина, в соответствии с которой необходимо управлять регулируемой величиной.
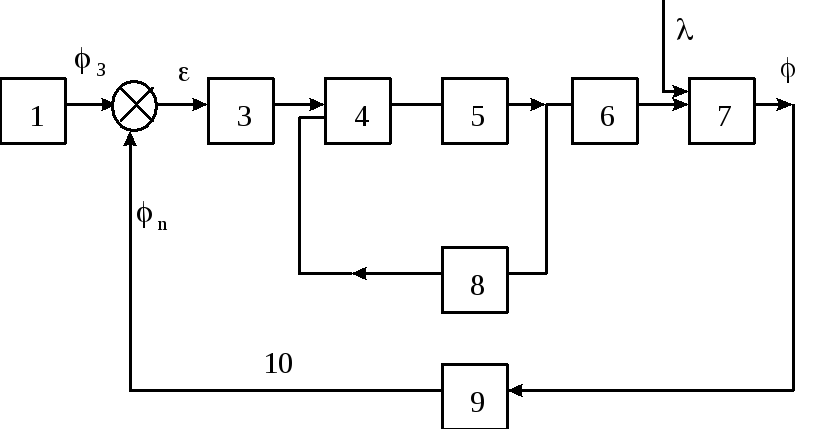 Исходя из определения САУ, она может
быть в общем виде представлена, как
это показано на рисунке:
Исходя из определения САУ, она может
быть в общем виде представлена, как
это показано на рисунке:
1 - управляющий или задающий элемент;
2 - элемент сравнения заданного
![]() и измеренного
и измеренного
![]() значения регулируемой величины,
выделяющий сигнал ошибки (рассогласования)
значения регулируемой величины,
выделяющий сигнал ошибки (рассогласования)
![]() ;
3 - корректирующий элемент (регулятор),
служащий для придания системе требуемых
динамических свойств; 4 - усилительный
элемент, усиливающий управляющий сигнал,
полученный в регуляторе; 5 - исполнительный
элемент (механизм); 6 - регулирующий
орган; 7 - объект регулирования; 8 - местная
обратная связь; 9 - измерительный
элемент; 10 - главная обратная связь;
;
3 - корректирующий элемент (регулятор),
служащий для придания системе требуемых
динамических свойств; 4 - усилительный
элемент, усиливающий управляющий сигнал,
полученный в регуляторе; 5 - исполнительный
элемент (механизм); 6 - регулирующий
орган; 7 - объект регулирования; 8 - местная
обратная связь; 9 - измерительный
элемент; 10 - главная обратная связь;
![]() -возмущающее воздействие;
-возмущающее воздействие;
![]() -регулируемая величина.
-регулируемая величина.
Всякое воздействие, которое стремится нарушить требуемую функциональную связь между управляющей и регулируемой величиной называется возмущающим.
Разность между заданным
![]() и измеренным
и измеренным
![]() значением регулируемой величины в
установившемся режиме называется
статической ошибкой (отклонением)
регулирования
значением регулируемой величины в
установившемся режиме называется
статической ошибкой (отклонением)
регулирования
![]() .
.
В каждом конкретном случае САУ может иметь дополнительные элементы или не иметь некоторых из указанных выше, например, элемента внутренней или главной обратной связи, усилителя.
№ 2 Основные характеристики звеньев и систем управления
Исследование свойств звеньев или систем управления может быть проведено по реакции на одинаковые входные сигналы. В качестве типовых входных сигналов используются различные функции.
а) ступенчатая функция, аналитическое выражение которой можно записать так:

![]()
Реакция звена или системы управления на единичную ступенчатую функцию называется переходной функцией. Если реакция звена или системы на ступенчатое входное воздействие получена экспериментально, то она называется кривой разгона.
б) импульсная функция. Является
производной ступенчатой функции и
обозначается
![]() .
.
Передаточная функция звена или системы - отношение операторных изображений выходной и входной величин при нулевых начальных условиях.
Переходная
![]() и импульсная переходная функция
и импульсная переходная функция
![]() называются временными характеристиками
звена или системы.
называются временными характеристиками
звена или системы.
![]() .
.
в) гармоническая функция. Она может быть задана в вещественной или комплексной форме:
![]() ,
или
,
или
![]() ,
,
где
![]() -угловая частота;
-угловая частота;
![]() - период колебаний.
- период колебаний.
Отношение установившегося гармонического сигнала на выходе звена или системы к гармоническому входному сигналу называется амплитудно-фазовой характеристикой (АФХ)
 (2)
(2)
где
![]() - вещественная часть амплитудно-фазовой
характеристики;
- вещественная часть амплитудно-фазовой
характеристики;
![]() - мнимая часть амплитудно-фазовой
характеристики.
- мнимая часть амплитудно-фазовой
характеристики.
Формально амплитудно-фазовая характеристика
может быть![]() получена путем замены в передаточной
функции
получена путем замены в передаточной
функции
![]() на
на
![]() .
.
По динамическим свойствам простейшие (неделимые) звенья подразделяются на усилительные, апериодические, интегрирующие, дифференцирующие, колебательные, звенья чистого запаздывания.
Основными характеристиками звеньев являются: дифференциальное уравнение, передаточная и переходная функции, амплитудно-фазовая характеристика, логарифмические частотные характеристики (ЛАЧХ, ЛФЧХ).
№3 Усилительное звено
Особенность усилительных звеньев: выходная величина в точности воспроизводит входную в измененном масштабе (усилители, потенциометры, редукторы, рычаги и т.д.):
![]() ,
(3)
,
(3)
где
![]() - коэффициент усиления, который может
быть больше и меньше единицы и иметь
размерность, согласующую выходную и
входную величины.
- коэффициент усиления, который может
быть больше и меньше единицы и иметь
размерность, согласующую выходную и
входную величины.
В операторной форме (3) запишем так:
![]() .
.
Передаточная функция усилительного звена:
![]() .
.
Амплитудно-фазовая характеристика
![]() не зависит от частоты.
не зависит от частоты.
№4 Апериодическое звено
Его называют инерционным звеном первого порядка, одноёмкостным статическим звеном. Дифференциальное уравнение его запишем так:
![]() ,
(4)
,
(4)
где
![]() - постоянная времени, имеющая размерность
времени,
- постоянная времени, имеющая размерность
времени,
![]() -коэффициент
усиления.
-коэффициент
усиления.
В операторной форме (4) запишем так (при нулевых начальных условиях):
![]() .
(5)
.
(5)
Передаточная функция звена будет такой:
![]() .
(6)
.
(6)
![]() (8)
(8)
где
![]() - амплитудно-частотная характеристика.
- амплитудно-частотная характеристика.
Фазо-частотная характеристика
![]() .
.
АФХ апериодического звена представляет
окружность с центром на вещественной
оси на расстоянии
![]() и радиусом
и радиусом
![]() .
.
№5 Интегрирующее звено
Выходная величина интегрирующего звена
равна интегралу по времени от входной,
![]() ,
или
,
или
![]() .
(10)
.
(10)
В операторной форме выражение (10) запишем так:
![]() ,
передаточная Функция звена равна:
,
передаточная Функция звена равна:
![]() ;
(11)
;
(11)
Амплитудно-Фазовая характеристика
интегрирующего звена получается из
уравнения (11) заменой
![]() :
:
![]() .
(13)
.
(13)
Очевидно, что АФХ интегрирующего звена
совпадает с мнимой осью комплексной
плоскости, начинаясь в
![]() при
при
![]() и стремясь к нулю при
и стремясь к нулю при
![]() .
.
№6 Дифференцирующее звено
Для идеального (физически не реализуемого) дифференцирующего звена выходная величина пропорциональна скорости изменения входной
![]() ,
(14)
,
(14)
где
![]() -
постоянная времени дифференцирования.
-
постоянная времени дифференцирования.
Если на вход такого звена подавать сигнал, изменяющийся с постоянной скоростью, то выходной сигнал будет постоянен. Время, за которое входной сигнал, изменяясь с постоянной скоростью от нуля до единицы, обеспечит выходной сигнал равный единице, называется постоянной времени дифференцирования идеального дифференцирующего звена.
Передаточная и амплитудно-фазовая характеристики дифференцирующего звена получаются из выражения (14) и равны:
![]() ;
;
![]() .
(15)
.
(15)
Легко видеть, что АФХ дифференцирующего
звена совпадает с мнимой осью. Она
начинается в начале координат при
![]() и устремляется в верхнюю полуплоскость
при
и устремляется в верхнюю полуплоскость
при
![]() .
.
№7 Колебательное звено
Статические и динамические свойства колебательного звена описываются дифференциальным уравнением второго порядка вида
![]() ,
(16)
,
(16)
где
![]() ,
,![]() - постоянные времени, имеющие размерность
времени.
- постоянные времени, имеющие размерность
времени.
Передаточная функция
![]() .
(18)
.
(18)
Амплитудно-фазовая характеристика
колебательного звена получается из
выражения (18) заменой
![]() :
:
![]() .
(33)
.
(33)
![]() .
(34)
.
(34)
№8 Звено чистого запаздывания
Уравнение, связывающее выходную и входную величины:
![]() .
(36)
.
(36)
Передаточная функция звена
![]() .
(37)
.
(37)
Амплитудно-фазовая характеристик
![]()
АФХ представляет на комплексной плоскости окружность единичного радиуса с центром в начале координат.
ЛАЧХ сливается с осью абсцисс, а ФЧХ
есть линейная функция
![]() ,
проходящая через начало координат.
,
проходящая через начало координат.
№ 9 Преобразование структурных схем
Правило преобразования структурных схем.
Учитывая, что ТАР работает с сист. у кот. только 1 ОС, А структ. сх. могут иметь неск. ОС, в том числе перекрещ-я связи, правило преобразования таких схем.
Схемы сначала преобразуются в многоконтурные, а потом в одноконтурный.
ПРАВИЛО:
1 .
.
![]()
2 .
.
x = x1
= x2 y
= y1 + y2
![]() Если
сист. содер-т неск. звеньев включ-х
паралл-но, то экв. сх. будет равна сумме
звеньев.
Если
сист. содер-т неск. звеньев включ-х
паралл-но, то экв. сх. будет равна сумме
звеньев.
3. переноса точек ответвления и сумматора
3.1. перемещение точ. ответвления по ходу упр-го сигн.
![]()
3.2. перенос точ. ответвления в напр-ии обратно ходу сигн.

4. перенос сумматоров
1 )
Если сумматоры
)
Если сумматоры
оказались на одной
линии, то порядок их
располож-ия не имеет
смысла.
 примечание:
примечание:
Если точки ответв.
оказались на одн.
линии, то их порядок
располож. так же не
имеет знач.
2) 1) перенос сумматора по ходу сигн

2) перенос сумматора в противоп. напр. по ходу сигн.

-
перенос точки ответвления ч/з сумматор

при переносе сумматоров и точек ответвления нельзя переносить сумматор ч/з точку отв. и точ. отв. ч/з сумматор.
№ 10 Основные законы регулирования
В настоящее время промышленные регуляторы реализуют следующие основные законы регулирования: П - пропорциональный, И - интегральный, ПИ - пропорционально-интегральный ПД - пропорционально-дифференциальный, ПИД - пропорционально – интегрально - дифференциальный.
Для идеального регулятора, реализующего П - закон регулирования справедливо соотношение
![]() ,
(40)
,
(40)
где
![]() - неравномерность регулятора - то
изменение регулируемой величины,
которое обеспечивает полный ход
регулирующего органа.
- неравномерность регулятора - то
изменение регулируемой величины,
которое обеспечивает полный ход
регулирующего органа.
Интегральный регулятор
Описывается уравнением
![]() (41)
(41)
где
![]() - постоянная времени интегрирования,
является настроечным параметром
регулятора. Характеристики его аналогичны
характеристикам идеального интегрирующего
звена.
- постоянная времени интегрирования,
является настроечным параметром
регулятора. Характеристики его аналогичны
характеристикам идеального интегрирующего
звена.
Пропорционально-интегральный регулятор
Может быть реализован с независимыми
параметрами настройки
![]() :
:
![]() (42)
(42)
и с зависимыми:
 .
(43)
.
(43)
В случае (42)
![]() называется постоянной времени
интегрирования и есть время, через
которое выходная величина за счет
интегральной составляющей достигнет
значения входного воздействия.
Проинтегрировав (42), получим
называется постоянной времени
интегрирования и есть время, через
которое выходная величина за счет
интегральной составляющей достигнет
значения входного воздействия.
Проинтегрировав (42), получим
![]() .
.
При
![]() второе слагаемое равно
второе слагаемое равно
![]() ,
т.е. входной величине.
,
т.е. входной величине.
В случае (43)
![]() называется временем удвоения.
Проинтегрировав (43), получим
называется временем удвоения.
Проинтегрировав (43), получим
![]() .
.
При
![]() второе слагаемое, получаемое за счет
интегральной составляющей, достигает
значения выходной величины, получаемой
за счет пропорциональности составляющей,
а на выходе регулятора результирующий
сигнал удваивается.
второе слагаемое, получаемое за счет
интегральной составляющей, достигает
значения выходной величины, получаемой
за счет пропорциональности составляющей,
а на выходе регулятора результирующий
сигнал удваивается.
Записав выражения (42) и (43) в операторной форме, легко получить передаточную функцию регулятора:
![]() или из выражения (43):
или из выражения (43):
![]() (44)
(44)
В дальнейшем рассмотрим свойства ПИ-регулятора, имеющего передаточную функцию вида (44).
Пропорционально-дифференциальный регулятор
Связь выходной и входной величин определяется соотношением
![]() (46)
(46)
где
![]() - постоянная времени дифференцирования.
- постоянная времени дифференцирования.
Передаточная функция имеет вид
![]() (47)
(47)
Амплитудно-фазовая характеристика
![]() (48)
(48)
На комплексной плоскости
![]() представляет прямую, начинающуюся на
положительной вещественной оси на
расстоянии
представляет прямую, начинающуюся на
положительной вещественной оси на
расстоянии
![]() и проходящую параллельно мнимой оси в
первом квадранте.
и проходящую параллельно мнимой оси в
первом квадранте.
Пропорционально -интегрально-дифференциальный регулятор
Имеет три параметра настройки:
![]() изменяемые в определенном диапазоне.
Связь выходной величины регулятора с
входной такая:
изменяемые в определенном диапазоне.
Связь выходной величины регулятора с
входной такая:
![]() (49)
(49)
Записав (49) в операторной форме и взяв отношение выходной величины к входной при нулевых начальных условиях, получим передаточную функцию регулятора:
![]() .
(50
.
(50
Амплитудно-фазовая характеристика (АФХ):
 (51)
(51)
ПИД - регулятор соединяет положительные свойства «ПИ» и «ПД»-регуляторов. Благодаря интегральной составляющей исключается статическая ошибка, а благодаря наличию производной в законе регулирования увеличивается коэффициент усиления регулятора на высоких частотах, что повышает его быстродействие.
№ 11 Прямое и непрямое регулирование.
В практике встречаются случаи, когда необязательно применение усилителей. При этом регулятор непосредственно действует на регулирующий орган и называется регулятором прямого действия. Автоматическая система с регулятором прямого действия называется системой прямого регулирования.
При наличии усилителей регулирующее устройство называется регулятором непрямого действия. Автоматическая система с регулятором непрямого действия называется системой непрямого регулирования.
№12 Методика составлений уравнений динамики.
Уравнение динамики одноемкостного объекта
Качество работы систем автоматического регулирования зависит от правильной настройки. Для правильного выбора настроек регулятора необходимо знать статические и динамические свойства объектов регулирования.
Процессы, протекающие в объектах регулирования, как правило, описываются дифференциальными уравнениями, которые можно получить различными способами: аналитически, экспериментально или экспериментально-аналитически.
При составлении дифференциальных уравнений необходимо прибегать к идеализации, учитывать основные свойства и пренебрегать второстепенными. В зависимости от степени точности и постановки задачи могут быть и различные идеализации. Одна и та же идеализация может быть целесообразной и нецелесообразной в зависимости от того, на какие вопросы мы хотим получить ответ.
Прежде чем приступить к составлению дифференциальных уравнений на основании анализа состояния и условий работы объекта необходимо сделать упрощающие допущения. Пусть условия работы объекта позволяют допустить (например):
1) уровень жидкости в баке не зависит от температуры (жидкость не изменяет своего объема, т.к. температура изменяется незначительно);
2) инерцией потока жидкости пренебрегаем;
3) считаем, что характер движения жидкости через регулирующие органы - ламинарный;
4) давление жидкости в питающем трубопроводе и у потребителя не изменяется.
Введена безразмерная форма записи уравнений динамики, повсеместно принятая в настоящее время. С этой целью вводятся безразмерные переменные:
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() - относительное изменение регулируемой
величины, регулирующего органа,
нагрузки.
- относительное изменение регулируемой
величины, регулирующего органа,
нагрузки.
![]() - коэффициент саморегулирования. Он
характеризует способность объекта
приходить к новому установившемуся
состоянию при наличии возмущения.
Саморегулирование объекта появляется
в результате того, что само изменение
регулируемой величины
- коэффициент саморегулирования. Он
характеризует способность объекта
приходить к новому установившемуся
состоянию при наличии возмущения.
Саморегулирование объекта появляется
в результате того, что само изменение
регулируемой величины
![]()
![]() стремится
обеспечить баланс.
стремится
обеспечить баланс.
Коэффициент усиления объекта
![]() есть отношение приращения выходной
величины к приращению входной в
установившемся режиме
есть отношение приращения выходной
величины к приращению входной в
установившемся режиме
Таким образом, если известна зависимость
выходной величины объекта во времени
при скачкообразном изменении входной,
то легко графически определить
параметры объекта (![]() и
и
![]() )
. Этим способом пользуются при
экспериментальном определении параметров
объекта.
)
. Этим способом пользуются при
экспериментальном определении параметров
объекта.
Многие промышленные объекты являются более сложными системами, которые могут включать несколько емкостей и сопротивлений и, следовательно, будут описываться более сложными дифференциальными уравнениями. Такие объекты называются многоемкостными.