

29
Трассу дороги следует проектировать как плавную линию в пространстве со взаимной увязкой элементов плана, продольного и поперечного профилей между собой и с окружающим ландшафтом, с оценкой их влияния на условия движения и зрительное восприятие дороги. Для обеспечения плавности дороги необходимо соблюдение принципов ландшафтного проектирования и использование рациональных сочетаний элементов плана и продольного профиля. Плавность дороги следует проверять расчетом через видимую кривизну ведущей линии и видимую ширину проезжей части в экстремальной точке в картинной плоскости. Для оценки зрительной ясности дороги рекомендуется построение перспективных изображений дороги. Для дорог I-а, I-б и II категорий не допускается сочетание продольных уклонов, кривых в плане и продольном профиле с такими величинами, при которых создается впечатление провалов.
Кривые в плане и продольном профиле, как правило, следует совмещать. При этом кривые в плане должны быть на 100…150 м длиннее кривых в продольном профиле, а смещение вершин кривых должно быть не более 1/4 длины меньшей из них. Следует избегать сопряжений концов кривых в плане с началом кривых в продольном профиле, расстояние между ними должно быть не менее 150 м. Если кривая в плане расположена в конце спуска длиной свыше 500 м и с уклоном более 30 ‰, радиус ее должен быть увеличен не менее чем в 1,5 раза по сравнению с величинами, приведенными в табл. 2.10, с совмещением кривой в плане и вогнутой кривой в продольном профиле в конце спуска.
Длину прямых вставок в плане следует ограничивать согласно табл. 2.15. Следует ограничивать также суммарную длину прямых, сопрягаемых короткой кривой в плане.
|
|
Таблица 2.15 |
Предельные длины прямых вставок в плане |
||
Категория дороги |
Предельная длина прямой в плане (м) в местности |
|
|
равнинной |
пересеченной |
I-а, I-б |
3500…5000 |
2000…3000 |
II, III |
2000…3500 |
1500…2000 |
IV, V |
1500…2000 |
1500 |
Примечание. Большие длины прямых вставок допустимы при преимущественно легковом движении, меньшие – при грузовом.
Радиусы смежных кривых в плане должны различаться не более чем в 1,3 раза. Параметры смежных переходных кривых при сопряжении кривых рекомендуется назначать одинаковыми.
При малых углах поворота дороги в плане рекомендуется применять радиусы круговых кривых, приведенные в табл. 2.16.
Не рекомендуется короткая прямая вставка между двумя кривыми в плане, направленными в одну сторону. При длине ее менее 100 м рекомендуется заменять обе кривые одной кривой большего радиуса, при длине 100…300 м
30
рекомендуется прямую вставку заменять переходной кривой большого параметра. Прямая вставка как самостоятельный элемент трассы допускается для дорог I-а, I-б и II категорий при ее длине более 700 м, для дорог III и IV категорий – более 300 м.
Таблица 2.16 Рекомендуемые радиусы кривых в плане при малых углах поворота
Угол поворота, |
|
|
|
|
|
|
|
град. |
1 |
2 |
3 |
4 |
5 |
6 |
7…8 |
Наименьший |
|
|
|
|
|
|
|
радиус круговой |
30000 |
20000 |
10000 |
6000 |
5000 |
3000 |
2500 |
кривой, м |
|
|
|
|
|
|
|
Порядок выполнения задания и исходные данные
1.Установить, используя выданную карту, условия местности для обоснования норм проектирования дороги: основные, трудные, особо трудные.
2.Принять значение расчетной скорости движения.
3.В соответствии с районом расположения дороги (см. табл. 2.17) назначить дорожно-климатическую зону и подзону.
|
|
Таблица 2.17 |
|
Перечень регионов |
|
Варианты |
|
Регионы |
01, 51 |
|
Алтайский край |
02, 52 |
|
Амурская область |
03, 53 |
|
Архангельская область |
04, 54 |
|
Башкирия |
05, 55 |
|
Белгородская область |
06, 56 |
|
Брянская область |
07, 57 |
|
Владимирская область |
08, 58 |
|
Вологодская область |
09, 59 |
|
Волгоградская область |
10, 60 |
|
Воронежская область |
11, 61 |
|
Горьковская область |
12, 62 |
|
Ивановская область |
13, 63 |
|
Иркутская область |
14, 64 |
|
Калужская область |
15, 65 |
|
Карелия |
16, 66 |
|
Кировская область |
17, 67 |
|
Костромская область |
18, 68 |
|
Краснодарский край |
19, 69 |
|
Красноярский край |
|
31 |
|
|
|
Окончание табл. 2.17 |
Варианты |
|
Регионы |
20, 70 |
|
Курганская область |
21, 71 |
|
Курская область |
22, 72 |
|
Ленинградская область |
23, 73 |
|
Липецкая область |
24, 74 |
|
Мордовия |
25, 75 |
|
Московская область |
26, 76 |
|
Новгородская область |
27, 77 |
|
Новосибирская область |
28, 78 |
|
Омская область |
29, 79 |
|
Орловская область |
30, 80 |
|
Пензенская область |
31, 81 |
|
Пермский край |
32, 82 |
|
Приморский край |
33, 83 |
|
Псковская область |
34, 84 |
|
Ростовская область |
35, 85 |
|
Рязанская область |
36, 86 |
|
Самарская область |
37, 87 |
|
Саратовская область |
38, 88 |
|
Свердловская область |
39, 89 |
|
Смоленская область |
40, 90 |
|
Тамбовская область |
41, 91 |
|
Татарстан |
42, 92 |
|
Тверская область |
43, 93 |
|
Томская область |
44, 94 |
|
Тульская область |
45, 95 |
|
Тюменская область |
46, 96 |
|
Удмуртия |
47, 97 |
|
Ульяновская область |
48, 98 |
|
Хабаровский край |
49, 99 |
|
Челябинская область |
50, 00 |
|
Ярославская область |
4. Выбрать основные нормы проектирования дороги и записать их в табл. 2.18.
Нормы проектирования автомобильной дороги |
Таблица 2.18 |
|
|
||
Наименование показателя |
Единица |
Значение |
|
измерения |
показателя |
Дорожно-климатическая зона и подзона |
– |
|
Категория дороги |
– |
|
32
Окончание табл. 2.18
Наименование показателя |
Единица |
Значение |
|
измерения |
показателя |
Расчетная интенсивность движения (среднегодо- |
прив. ед. |
|
вая суточная за последний год перспективного |
сут. |
|
периода) |
|
|
Расчетная скорость движения |
км/ч |
|
|
м/с |
|
Число полос движения |
– |
|
Ширина полосы движения |
м |
|
Ширина проезжей части |
м |
|
Ширина обочины |
м |
|
Наименьшая ширина укрепительной полосы обо- |
|
|
чины |
м |
|
Ширина земляного полотна |
м |
|
Ширина дополнительной полосы на подъем |
м |
|
Протяженность дополнительной полосы за |
|
|
подъемом |
м |
|
Поперечный уклон поверхности проезжей части |
‰ |
|
Поперечный уклон поверхности укрепленных |
|
|
полос обочин |
‰ |
|
Поперечный уклон поверхности грунтовых полос |
|
|
обочин |
‰ |
|
Наибольший продольный уклон |
‰ |
|
Наименьшее расстояние видимости: |
|
|
для остановки |
м |
|
встречного автомобиля |
м |
|
боковой |
м |
|
Наименьший радиус кривых в плане |
м |
|
Уклон виража |
‰ |
|
Наименьшие радиусы кривых в продольном про- |
|
|
филе (вертикальных кривых): |
|
|
выпуклых |
м |
|
вогнутых |
м |
|
Наибольшая длина прямой вставки в плане |
м |
|
5.Оформить отчет. В выводах отразить принятые нормы проектирования дороги.
33
ЗАДАНИЕ № 3
Обоснование минимально допустимого радиуса кривой в плане и параметра переходной кривой
Определение коэффициента поперечной силы
При движении транспортных средств по кривым в плане помимо продольных сил (движущие силы, тормозящая сила, силы сопротивления движению) на них действует поперечная сила Y (кН), которая направлена перпендикулярно направлению движения по радиусу траектории от центра кривой. Поперечная сила представляет собой равнодействующую двух сил: центробежной и составляющей силы тяжести транспортного средства, направленной вдоль поперечного уклона транспортного средства.
Y = |
Qv2 |
−QgiП , |
(3.1) |
|
R |
||||
|
|
|
где Q – масса транспортного средства, т;
v – скорость движения, м/с;
g – ускорение свободного падения, м/с2;
iП – поперечный уклон транспортного средства, который равен попереч-
ному уклону поверхности проезжей части на кривой (доли единицы), при уклоне поверхности проезжей части к центру кривой – положительный, при уклоне от центра кривой – отрицательный.
Помимо непосредственного опрокидывающего и сдвигающего действия, влияние поперечной силы проявляется также в изменении условии управления автомобилем вследствие перераспределения нагрузки между колесами и в ухудшении удобства для пассажиров, ощущающих боковой наклон. Поперечная сила вызывает угловую деформацию шин (боковой увод), которая отражается на управляемости автомобилем и сопряжена с увеличением износа шин и повышением расхода топлива, так как создает дополнительное сопротивление движению.
Согласно уравнению (3.1) поперечная сила зависит от массы транспортного средства Q , а следовательно ее величина будет своя для каждого транс-
портного средства, то есть Y не является универсальным показателем, по которому можно оценить влияние кривых в плане на условия и безопасность движения, так как в составе потока много групп транспортных средств с разными значениями Q . Если обе части уравнения (3.1) разделить на вес транспортного
средства gQ , то оно примет вид
|
|
μ = |
Y |
= |
v2 |
−iП , |
(3.2) |
|
Y |
gQ |
gR |
||||
|
|
|
|
|
|||
где μ = |
– коэффициент поперечной силы (безразмерная величина). |
|
|||||
gQ |
|
||||||
|
|
|
|
|
|
|
|

34
Значение коэффициента поперечной силы не зависит от массы транспортного средства, а зависит только от дорожных факторов: скорости движения, радиуса кривой в плане и поперечного уклона поверхности проезжей части. Этот показатель удобен для оценки условий движения транспортных средств по кривым в плане, так как не связан с конкретным автомобилем, а отражает только дорожные условия.
Коэффициент поперечной силы μ нормируется исходя из ряда требований: устойчивость транспортных средств и грузов против опрокидывания; устойчивость транспортных средств против заноса; самочувствие пассажиров при проезде по кривым; допускаемое превышение расхода топлива и износа шин на кривых по сравнению с прямыми участками.
Устойчивость транспортного средства против опрокидывания обеспечи-
вается, если выполняется следующее условие |
|
|||
μ ≤ |
b −2a |
, |
(3.3) |
|
2h |
||||
|
|
|
||
где b – ширина колеи транспортного средства (м), которая составляет: 1,2…1,6 м для легковых автомобилей и микроавтобусов, 1,7…2,1 м для автобусов, 1,6…2,16 м для грузовых автомобилей;
a – боковое смещение центра тяжести транспортного средства из-за деформации рессор (м), которое можно принимать приблизительно равным
0,2 м;
h – высота центра тяжести транспортного средства, м.
h = |
b |
, |
(3.4) |
|
K
где K – коэффициент, равный для легковых автомобилей 1,8…2,5, для грузовых – 2…3, для автобусов – 1,7…2,2.
При проезде автомобилями криволинейных в плане участков дороги сцепление шин с покрытием должно обеспечить наряду с сопротивлением боковому смещению колеса также передачу тягового или тормозного усилия на покрытие.
Приложенные к ведущему колесу автомобиля поперечная сила Y и тяговое или тормозное усилие F создают в плоскости контакта колеса с покрытием суммарное сдвигающее усилие Fсд , направленное под углом к траектории дви-
жения. Для обеспечения устойчивости транспортного средства против заноса
необходимо соблюдение условия |
|
|
F = |
Y 2 + F 2 ≤G ϕ, |
(3.5) |
сд |
к |
|
где Gк – нагрузка от колеса на покрытие с учетом перераспределения нагрузки
под влиянием поперечного уклона и центробежной силы, а также временной разгрузки при движении по неровной поверхности, кН;
ϕ– расчетное значение коэффициента сцепления колеса с покрытием.
Всвязи с колебаниями автомобиля при движении по неровному покры-
35
тию в отдельные моменты (во время разжатия рессоры и разгрузки колеса) нагрузка от колеса на покрытие при качении может стать меньше его статической нагрузки, при этом значительно снижается сила сцепления шины с покрытием, препятствующая возникновению заноса. Чем более неровно покрытие, тем хуже условия устойчивости автомобиля. При движении автомобиля по кривой с большой скоростью в процессе подскакивания колес возникает их раскручивание, а при вхождении колес вновь в контакт с поверхностью дороги происходит их резкое пробуксовывание, которое может привести к заносу автомобиля. Однако в связи с невозможностью исчерпывающе учесть указанное обстоятельство его влияние компенсируют снижением расчетного значения коэффициента сцепления ϕ.
При действии на колесо поперечной силы Y превышение силой тяги значения Gкγ (γ – коэффициент тяговой или тормозной силы – часть общего ко-
эффициента сцепления ϕ расходуемая на создание тягового или тормозящего усилия) вызовет пробуксовывание менее нагруженного внутреннего заднего колеса. При развившемся буксовании в связи с возрастанием скорости вращения колеса коэффициент сцепления снизится, и создадутся условия для заноса автомобиля, поэтому предельное значение поперечной силы, воспринимаемой колесом без пробуксовывания, будет
Y = μG ≤G ϕ2 |
−γ 2 . |
(3.6) |
к к |
|
|
Предельная возможная часть общего коэффициента сцепления шины с покрытием ϕпч , которая может быть использована для противодействия по-
перечной силе, составляет
μ ≤ϕпч = ϕ2 −γ 2 . |
(3.7) |
Это уравнение показывает, что криволинейные участки на дороге ограничивают силу тяги, используемую для преодоления продольных уклонов или тормозящую силу.
При нормировании радиусов кривых на дороге приходится задаваться распределением значения общего коэффициента сцепления между его составляющими, используемыми для сопротивления заносу и обеспечения силы тяги или тормозящего усилия. При этом, чем большая часть общего коэффициента сцепления используется для преодоления продольного уклона или для торможения автомобиля, тем меньшая доля коэффициента сцепления шины с покрытием может противостоять поперечному смещению транспортного средства на кривой. Устройство на дорогах с высокими скоростями движения кривых малых радиусов ухудшает безопасность движения. Используемое при проезде автомобилями таких кривых повышенное значение коэффициента поперечной силы увеличивает опасность заноса в случае экстренного торможения и приводит к возрастанию длины тормозного пути.
Значение коэффициента сцепления ϕ при скорости движения v (км/ч) можно рассчитать по формуле

36
ϕ =ϕ0 − β (v −20), |
(3.8) |
где ϕ0 – значение коэффициента сцепления при скорости движения до 20 км/ч; β – коэффициент снижения значения коэффициента сцепления в зависимости от скорости движения, (км/ч)-1.
Под действием поперечной силы пассажиры и водители ощущают во время проезда по кривым боковой наклон. Неудобство движения становится тем заметнее, чем больше поперечная сила. Начиная с некоторых значений коэффициента поперечной силы, возникает ощущение опасности опрокидывания автомобиля. Установлено, что при μ=0,1 пассажир, не глядящий на дорогу, не
замечает, что он едет по кривой, при μ=0,15 движение по кривой ощущается слабо, а при μ=0,2, ясно ощущая движение, пассажир уже испытывает легкое неудобство. При μ=0,3 въезд на кривую ощущается как толчок, наклоняющий пассажира или водителя вбок. Для водителей проезд по кривым связан с осложнением процесса управления автомобилем. При этом их нервноэмоциональная напряженность, всегда сопутствующая ведению автомобиля, оставаясь примерно такой же, как на прямых участках до значений μ=0,15, начинает быстро возрастать, при превышении коэффициентом поперечной силы значения 0,2. Таким образом, для обеспечения комфортности движения величина коэффициента поперечной силы не должна превышать 0,15.
Из трех значений коэффициента поперечной силы, определенных по условиям: устойчивости против опрокидывания, устойчивости против заноса и комфортности движения выбирается наименьшее.
Обоснование минимально допустимого радиуса кривой в плане
Взависимости от выбранного значения коэффициента поперечной силы
μдля известной расчетной скорости движения vР (м/с) можно рассчитать ми-
нимально допустимый радиус кривой в плане R (м)
vР2 |
|
R = g (μ +iП ), |
(3.9) |
При устройстве виража на кривой минимально допустимый радиус определяется по формуле
R = |
vР2 |
|
, |
(3.10) |
g (μ +i |
) |
|||
|
В |
|
|
|
где iВ – поперечный уклон виража (доли единицы).
Безопасность движения по кривым в плане значительно ухудшается в темное время суток, когда свет фар освещает дорогу только на малом расстоянии перед автомобилем. Оптические устройства современных фар концентрируют лучи света в виде эллиптической фигуры, которая может быть охарактеризована углом раствора α (град.), стягивающим в пределах земляного полотна изолинию минимальной допустимой освещенности поверхности дороги, кото-

37
рая принимается равной 2 лк. Угол α можно принимать приблизительно равным 2 град.
Радиус R , при котором видимость дороги на кривой будет соответствовать расчетному значению расстояния видимости поверхности дороги SВ , мо-
жет быть найден по формуле
R = |
28,65SВ |
. |
(3.11) |
|
|||
|
α |
|
|
Минимально допустимая величина радиуса кривой в плане нормируется |
|||
СНиП 2.05.02-85*. |
|
||
Установление параметра переходной кривой |
|
||
Параметр переходной кривой A представляет собой значение |
равное |
||
квадратному корню из произведения радиуса основной (круговой) кривой R на |
|||
длину переходной кривой L , то есть |
|
||
A = RL , |
(3.12) |
||
Минимально допустимое значение параметра переходной кривой определяется из условия ограничения нарастания центробежного ускорения, которое происходит при изменении радиуса траектории движения.
2 |
|
v3 |
|
|
C = A |
= |
Р |
, |
(3.13) |
|
||||
где C = RL ; |
|
Jдоп |
|
|
|
|
|
ускорения (м/с3), равное |
|
Jдоп – допустимое нарастание центробежного |
||||
0,3…0,6 м/с3. |
|
|
|
|
Порядок выполнения задания и исходные данные
1.Рассчитать предельные значения коэффициента поперечной силы по условию устойчивости против опрокидывания для легковых автомобилей, автобусов и грузовых автомобилей. Результаты свести в табл. 3.1.
Таблица 3.1 Матрица расчета коэффициента поперечной силы по условию
устойчивости транспортных средств опрокидыванию
Типы |
Ширина |
Боковое |
Коэффициент |
Высота |
Коэффициент |
транспорт- |
колеи, м |
смещение |
K |
центра |
поперечной |
ных средств |
|
центра |
|
тяжести, |
силы |
|
|
тяжести, м |
|
м |
|
Легковые |
|
|
|
|
|
автомобили |
|
|
|
|
|
Автобусы |
|
|
|
|
|
Грузовые |
|
|
|
|
|
автомобили, |
|
|
|
|
|
автопоезда |
|
|
|
|
|

38
2.Определить коэффициент поперечной силы по условию устойчивости против заноса. В расчетах принять расчетные значения коэффициентов: сцепления ϕ0 и β по табл. 3.2 для асфальтобетонного покрытия. Коэффициент тяговой
или тормозной силы γ следует принять для легковых автомобилей – 0,7ϕ , для автобусов и грузовых автомобилей – 0,8ϕ , для автопоездов – 0,9ϕ. Расчетную скорость движения для автопоездов принимать не более 80 км/ч. Результаты расчетов свести в табл. 3.3.
|
|
|
|
|
|
|
Таблица 3.2 |
Расчетные значения коэффициентов: сцепления ϕ0 |
и β |
||||||
Покрытие |
Для дорог II, III категорий |
|
Для дорог IV, V категорий |
||||
|
ϕ0 |
|
β |
|
ϕ0 |
|
β |
Асфальтобетонное |
0,6 |
0,0035 |
|
0,5 |
0,0035 |
||
Чернощебеночное |
– |
|
– |
|
0,35 |
0,0025 |
|
|
|
|
|
|
|
|
Таблица 3.3 |
Матрица расчета коэффициента поперечной силы по условию |
|||||||
устойчивости транспортных средств против заноса |
|||||||
Показатели |
|
Транспортные средства |
|||||
|
легковые |
автобусы, |
|
|
|||
|
|
|
автомобили |
грузовые |
|
автопоезда |
|
|
|
|
|
|
автомобили |
|
|
Расчетная скорость движения, км/ч
Коэффициент сцепления
Коэффициент тяговой или тормозной силы
Коэффициент поперечной силы
3.Из таблиц 3.1 и 3.3 выбрать минимальные значения коэффициента поперечной силы и сравнить их со значением коэффициента поперечной силы допустимым по условию обеспечения комфортности движения. Выбрать наименьшее значение коэффициента поперечной силы для каждой группы транспортных средств.
4.Рассчитать радиус кривой при наименьшем значении коэффициента поперечной силы для каждой группы транспортных средств. Результаты представить в форме табл. 3.4.
5.Рассчитать радиус кривой из условия обеспечения видимости поверхности дороги в темное время суток. Заполнить табл. 3.5. Выбрать минимально допустимый радиус кривой в плане.
6.Рассчитать минимально допустимый параметр переходной кривой. Результаты представить в форме табл. 3.6.
39
Таблица 3.4 Результаты расчета минимально допустимого радиуса кривой
Транспортные средства |
μ |
Радиус кривой (м) при |
|||
|
поперечном уклоне |
||||
|
|
транспортного средства |
|||
|
|
−iП |
|
iП |
iВ |
Легковые автомобили |
|
|
|
|
|
Автобусы, грузовые автомобили |
|
|
|
|
|
Автопоезда |
|
|
|
|
|
|
|
|
|
|
Таблица 3.5 |
Минимально допустимые радиусы кривых в плане
Критерий Радиус кривой, м
Коэффициент поперечной силы μ= ____ при
iП = ____
iВ = ____
Видимость поверхности дороги в темное время суток при
SВ = _____ м
Требование СНиП 2.05.02-85*
|
|
Таблица 3.6 |
Минимально допустимые параметры переходных кривых |
||
Нарастание центробежного |
Параметр переходной кривой |
|
ускорения, м/с3 |
C , м2 |
A, м |
0,3 |
|
|
0,4 |
|
|
0,5 |
|
|
0,6 |
|
|
7.При принятых: радиусе кривой в плане и уклоне виража, определить по формуле (3.10) допустимые скорости движения транспортных средств по обледенелому покрытию. Значение μ определить по формуле (3.7). Принять зна-
чения ϕ – 0,02; 0,05; 0,1; β =0,0002. Вычислить значения ϕ0 . Результаты представить в табл. 3.7.
8.Оформить отчет. В выводах дать сравнительную оценку расчетных значений радиуса кривой и требуемого СНиП 2.05.02-85*, а также условий движения при нормальном и обледенелом состоянии покрытия.
40
41
ЗАДАНИЕ № 4
Обоснование максимально допустимого продольного уклона дороги
Силы, действующие на транспортное средство при движении
При движении транспортного средства по дороге на него действуют две группы сил: движущие силы и силы сопротивления движения. Эти силы можно разложить на оси координат. Система координат выбирается следующим образом: ось X направлена параллельно направлению движения, ось Y направлена перпендикулярно направлению движения и наклонена к уровенной поверхности под углом поперечного наклона транспортного средства, ось Z направлена перпендикулярно плоскости осей X и Y . Проекции сил, действующих на транспортное средство, на оси принятой системы координат имеют следующие названия: продольные силы – проекции на ось X ; поперечные силы – проекции сил на ось Y ; вертикальные силы – проекции на ось Z . Вертикальные силы вызывают напряжения в элементах ходовой части транспортного средства, колебания подрессоренных масс, определяют величину сил продольного и поперечного сцепления движителей с поверхностью дороги. Силы сцепления колес с поверхностью дороги обеспечивают реализацию транспортными средствами тяговых и тормозных усилий, управляемость автомобиля. Поперечные силы при определенных условиях могут вызвать потерю транспортным средством устойчивости, следствием чего являются заносы и опрокидывание. Движение транспортного средства происходит в результате взаимодействия продольных сил.
В группе продольных сил выделяются следующие силы: касательная сила тяги F (кН), которая является движущей силой при движении в режиме тягового усилия; силы сопротивления движению (кН): сопротивление качению PК ,
сопротивление воздушной среды PВ , сопротивление Pукл от продольного уклона дороги i , сопротивление от кривой Pкр , сопротивление троганию с места Pтр , тормозящая сила Pтор , сила инерции поступательно движущихся масс Pин.пост .
Уравнение связывающие перечисленные силы называется уравнением тягового баланса транспортного средства и имеет вид
F − PК − PВ − Pукл − Pкр − Pтр − Pтор − Pин.пост = 0 . |
(4.1) |
Касательная сила тяги F возникает в зоне контакта ведущих колес транспортного средства с дорожным покрытием и составляет меньшее значение из двух: касательной силы тяги Fкас , которая создается на ободе ведущих колес
в результате приложения к ним крутящего момента, передаваемого через трансмиссию от двигателя; силы сцепления ведущих колес с покрытием дороги
Fсц , то есть F = min{Fкас; Fсц}.
F |
= |
MiТη −Q |
aδ ; F |
=Q gγ =Qk |
сц |
gγ , |
(4.2) |
|
кас |
|
r |
тяг |
сц |
сц |
|
|
|
|
|
|
|
|
|
|
|
|
42
где M – крутящий момент на маховике двигателя, кН м; iТ – передаточное число трансмиссии;
η – коэффициент полезного действия трансмиссии, принимаемый в зависимости от колесной формулы автомобиля или тягача (при колесной фор-
муле 4х2 η=0,9…0,92; 4х4 и 6х4 – η=0,85; 6х6 – η=0,8);
r – радиус качения ведущих колес, принимаемый 93…100 % от статического радиуса колеса (меньшие значения для грузовых автомобилей и автобусов, большие – для легковых), м;
Qтяг – масса автомобиля (для автопоезда – тягача), т;
a– ускорение транспортного средства, м/с2;
δ– коэффициент, учитывающий инерцию вращающихся масс;
Qсц – доля массы транспортного средства, приходящаяся на ведущие оси,
т;
kсц – коэффициент, учитывающий долю массы транспортного средства
приходящуюся на ведущие оси; γ – коэффициент тяговой силы, равный (0,7…1)ϕ;
ϕ – коэффициент сцепления колеса с покрытием.
iТ =iКПiРКiГП , |
(4.3) |
где iКП , iРК , iГП – соответственно передаточные числа коробки передач (КП),
раздаточной коробки (РК), главной передачи (ГП), если РК отсутствует, то iРК =1.
Крутящий момент на маховике двигателя M (кН м) является функцией частоты вращения коленчатого вала n (с–1) или (об./мин.) и определяется сле-
дующей зависимостью |
|
|
|
|
|
|
|
|
|
|
|
|
|
Neβγ |
Д |
|
|
n |
|
n 2 |
|
|
|||
M = |
|
|
a +b |
|
|
+c |
|
|
|
, |
(4.4) |
|
n |
|
n |
n |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
е |
|
|
e |
e |
|
|
|
||||
где Ne – максимальная мощность двигателя, кВт;
β – коэффициент, учитывающий отбор мощности на вспомогательные ну-
жды, равный 0,9…0,95;
γ Д – коэффициент использования мощности двигателя, равный 0,85…90, в режимах трогания с места и при разгоне можно принимать γ Д =1;
ne – частота вращения коленчатого вала двигателя, соответствующая максимальной мощности Ne , с–1;
a , b, c – коэффициенты, принимаемые в зависимости от марки двигателя, приближенно можно принять значения коэффициентов для карбюраторного двигателя соответственно: 1; 1; –1, для дизельного: 0,5; 1,5; – 1.
43
Значения M можно также снять с динамических характеристик двигателей, при их наличии. Значения Ne , ne , iКП , iРК , iГП , r , Qсц , Q принимаются по техническим характеристикам автомобилей, тягачей и прицепного состава.
Коэффициент сцепления ϕ рассчитывается в зависимости от скорости движения по формуле (3.8), а следовательно Fсц зависит от скорости движения
при v > 20 км/ч.
Сопротивление качению PК возникает в результате потери энергии на
деформирование поверхности пути и шины |
|
PК = Qgf cosα , |
(4.5) |
где f – коэффициент сопротивления качению; |
|
α– угол наклона транспортного средства по направлению движения, град.
Вдорожных условиях угол α достаточно мал, а поэтому можно принять, что cosα ≈1 и формула (4.5) примет вид
PК = Qgf . |
(4.6) |
Коэффициент сопротивления качению f зависит от многих факторов, но
ведущими являются: тип дорожного покрытия, состояние дорожного покрытия и скорость движения v . Для дорог с твердым покрытием значение f может
быть рассчитано по зависимости |
|
f = f0 + K f (v − 20), |
(4.7) |
где f0 – коэффициент сопротивления качению при малых скоростях (до 20
км/ч), принимаемый по табл. 4.1;
K f – коэффициент, изменения сопротивления качению, равный для грузовых автомобилей и автобусов 0,00025, для легковых автомобилей 0,0002.
|
|
|
|
Таблица 4.1 |
|
Значения f0 для различных типов дорожных покрытий |
|||
|
Тип покрытия |
Значения f0 на покрытиях |
||
|
сухом |
влажном |
мокром, |
|
|
|
|
|
грязном |
Цементобетонные, |
0,01…0,02 |
0,02…0,03 |
0,03…0,035 |
|
асфальтобетонные |
|
|
|
|
Цементобетонные и |
0,02 |
0,02…0,03 |
0,03…0,035 |
|
асфальтобетонные с поверхно- |
|
|
|
|
стной обработкой |
|
|
|
|
Покрытия из холодного асфаль- |
0,02…0,025 |
0,025…0,035 |
0,03…0,045 |
|
тобетона, |
чернощебеночное, |
|
|
|
черногравийное |
|
|
|
|
Гравийное, щебеночное |
0,035 |
0,035…0,05 |
0,04…0,06 |
|
Грунтовое |
0,03 |
0,04…0,05 |
0,05…0,15 |
|
44
Для автопоездов значение сопротивления качению PК определенное по
формуле (4.6) следует увеличить в (1+0,05m) раз, где m – количество единиц прицепного состава в автопоезде.
Сопротивление воздушной среды PВ – величина переменная, но сопро-
тивление воздушной среды постоянно действует на дороге, так же как сопротивление качению PК . При скоростях до 40 км/ч значением PВ можно пренеб-
регать в тяговых и тормозных расчетах. В зависимости от скорости движения v (км/ч) PВ (кН) составит
P = 0,08kωv2 |
, |
(4.8) |
В |
|
|
где k – эмпирический коэффициент сопротивления воздушной среды (коэф-
фициент обтекаемости), принимаемый по табл. 4.2, |
кН с2 |
; |
|
м4 |
|||
|
|
ω – площадь лобовой проекции (парусности) транспортного средства, м2.
Таблица 4.2 Значения коэффициентов сопротивления воздушной среды k
Тип транспортного средства |
Значение k , кН с |
2 |
|
||
|
|
|
|
м4 |
|
Гоночные автомобили |
0,00013…0,00015 |
|
Легковые автомобили |
0,00015…0,00035 |
|
Автобусы |
0,00024…0,0004 |
|
Грузовые автомобили |
0,0005…0,0007 |
|
Автопоезда |
0,0006…0,00085* |
|
Автофургоны |
0,001…0,0012 |
|
Примечание. * – Значение для автопоезда с одной единицей прицепного состава, при большем количестве прицепов значение k увеличивается на (0,25…0,30) k (m −1), где m – количество единиц прицепного
состава в автопоезде.
ω =ηdH , |
(4.9) |
где η – коэффициент, равный для легковых автомобилей 0,7…0,8, для грузовых автомобилей и автобусов – 0,9;
d , H – соответственно габаритная ширина и высота транспортного средства, м.
Сумма сопротивлений качению и воздушной среды Pосн
называется основным дорожным сопротивлением.
Сопротивление от продольного уклона i (доли единицы) пути Pукл представляет собой составляющую силы тяжести Qg транспортного средства, направленную по уклону и равную
45 |
|
Pукл =Qg sinα . |
(4.10) |
Так как в дорожных условиях угол α мал, то sinα ≈tgα =i , а значит |
|
Pукл =Qgi . |
(4.11) |
Если транспортное средство преодолевает уклон (движется на подъем), то Pукл является наиболее весомым сопротивлением движению, а если транс-
портное средство движется на спуске, то Pукл является естественно движущей
силой – силой скатывания, которая способна разгонять его до значительных скоростей, в случае, когда Pукл превышает значение суммы всех действующих
по направлению движения сопротивлений.
Сопротивление движению транспортных средств от кривой в плане Pкр
складывается из следующих составляющих: дополнительное сопротивление, вызываемое боковым уводом колес; дополнительное сопротивление за счет несовпадения направления силы тяги и направления движения транспортного средства; дополнительное сопротивление движению транспортных средств по внутренней полосе движения за счет сокращения длины траектории; дополнительное сопротивление за счет косого уклона, образованного совпадением продольного уклона с поперечным уклоном. Сопротивление от кривой Pкр опреде-
ляется по формуле
Pукл =QgiЭ . |
(4.12) |
где iЭ – эквивалентный уклон, учитывающий сопротивление от кривой, доли
единицы.
Влияние кривых малого радиуса, на которых Pкр значительно компенси-
руется снижением наибольшего продольного уклона на участках данных кривых на величину эквивалентного уклона iЭ , а поэтому при обосновании вели-
чины наибольшего продольного уклона дороги считается, что сопротивления от кривой и от уклона являются одним сопротивлением Pукл .
Сопротивление троганию с места Pтр действует только в начальный мо-
мент движения (при трогании с места), оно равно |
|
Pтр =Qgfтр , |
(4.13) |
где fтр – коэффициент сопротивления троганию с места, равный 0,01…0,015
(меньшее значение для легковых автомобилей, большее – для автопоездов). Тормозная сила Pтор – искусственно создаваемое сопротивление движе-
нию в результате трения тормозных колодок о тормозной барабан, при этом линейная скорость на ободе колеса снижается и будет меньше скорости поступательного движения транспортного средства. Таким образом, тормозящиеся колеса транспортного средства пробуксовывают и создают сопротивление равное
Pтор =Qторgλ, |
(4.14) |
46
где Qтор – доля массы транспортного средства, приходящаяся на тормозящиеся оси, т;
λ– коэффициент тормозной силы, равный (0,7…1)ϕ.
Усовременных автотранспортных средств, как правило, все оси тормозятся, а следовательно Qтор =Q . Если не все оси транспортного средства тормо-
зятся, то Qтор = kторQ , где kтор – коэффициент, учитывающий долю массы
транспортного средства, приходящуюся на тормозящиеся оси.
Торможение транспортного средства обеспечивается в результате трения колес о покрытие дороги в моменты пробуксовывания, а поэтому максимальное значение тормозной силы Pтор ограничено силой сцепления тормозящихся ко-
лес с покрытием дороги, то есть Pтор ≤Qторgϕ . Тормозная сила достигает своего
максимального значения при блокировке тормозящихся колес, когда движение происходит юзом, в этом случае Pтор =Qторgϕ.
Сила инерции Pин представляет собой сумму двух сил: силы инерции поступательно движущихся масс Pин. пост и силы инерции вращающихся масс
Pин. вращ . Сила инерции поступательно движущихся масс |
равна |
||
P |
=Qa =Qgj , где a – ускорение транспортного средства, м/с2; j = |
a |
– от- |
|
|||
ин. пост |
|
g |
|
|
|
|
|
носительное ускорение транспортного средства, выражаемое в долях от ускорения свободного падения g . Сила инерции вращающихся масс автомобиля
Pин. вращ в тяговых расчетах учитывается как доля от Pин. пост |
посредством коэф- |
|||
фициента δ равного |
(i |
|
)2 , |
|
δ = 0,04 + n |
i |
(4.15) |
||
0 |
|
КП РК |
|
|
где n0 – коэффициент, значение которого принимается для легковых автомо-
билей 0,03…0,05; для грузовых автомобилей и автобусов 0,05…0,07 (большие значения для более тяжелых автомобилей).
Сила инерции Pин автомобиля равна
Pин = Pин. пост + Pин. вращ = (1 +δ )Pин. пост =(1 +δ )Qa =(1 +δ )Qgj . (4.16)
Для автопоезда сила инерции вращающихся масс считается от силы инерции поступательно движущихся масс только тягача, а поэтому для автопоезда
|
|
|
(4.17) |
Pин = Qтяг (1 |
+δ )+Qпр a = Qтяг (1 |
+δ )+Qпр gj , |
где Qтяг , Qпр – соответственно масса тягача и прицепного состава
(Q =Qтяг +Qпр ), т.
Сила инерции Pин при разгоне транспортного средства создает сопротив-
ление движению, а при замедлении, например при торможении, сила инерции является естественно движущей силой.
47
Обоснование наибольшего подъема
Уравнение (4.1) является общим и позволяет в совокупности с формулами (4.2) – (4.17) получить математические модели движения транспортных средств в разных режимах. Трогание с места описывается уравнением вида
F − PК − Pукл − Pтр − Pин.пост = 0 . |
(4.18) |
Уравнение (4.18) получено из уравнения (4.1), в котором принято, что Pтор = 0, значением PВ можно принебрегнуть в виду малой скорости, сопротив-
ление от кривой учитывается через эквивалентный уклон суммарно с сопротивлением от уклона, движение происходит на подъем. Из уравнения (4.18) можно получить зависимости для расчета предельного подъема iтр (доли единицы), на
котором возможно трогание с места
i |
= |
F |
− f − f |
|
− |
a |
. |
(4.19) |
Qg |
|
|
||||||
тр |
|
|
тр |
|
g |
|
||
При расчетах по формуле (4.19) значение F определяется по формулам (4.2) для первой передачи КП, значения коэффициентов сцепления и сопротивления качению можно считать постоянными.
Движение транспортного средства в режиме тягового усилия описывается уравнением вида
F − PК − PВ − Pукл − Pин.пост = 0 . |
(4.20) |
Решение данного уравнения представляет определенную сложность в виду того, что практически невозможно смоделировать поведение водителя и точно оценить выбираемый им режим движения. Режим движения с тяговым усилием, при котором скорость v постоянна ( v =const) называется установившемся режимом движения. При таком режиме ускорение транспортного средства равно 0 ( a =0), а следовательно Pин = 0 и уравнение (4.20) упрощается
F − PК − PВ − Pукл = 0. |
(4.21) |
Полученное уравнение используется для определения значений предельных уклонов (подъемов), преодолеваемых транспортными средствами. Если принять, что скорость транспортного средства менее 20 км/ч, то сопротивлением воздушной среды PВ можно пренебречь, а сопротивление качению PК мож-
но считать не зависимым от скорости. В этом случае уклон i |
(доли единицы), |
||
преодолеваемый транспортным средством равен |
|
||
i = |
F |
− f . |
(4.22) |
|
|||
|
Qg |
|
|
При расчетах по формуле (4.22) значение F определяется по формулам (4.2) для второй передачи КП, значения коэффициентов сцепления и сопротивления качению являются постоянными.

48
Установление безопасного спуска
Продольный уклон дороги является подъемом в одном направлении и спуском в обратном направлении, а значит, его величина не должна превышать величины безопасного спуска iсп . Безопасным спуском называется уклон, на
котором транспортное средство может остановиться на резервном расстоянии SР от препятствия, равном 5…10 м. Зная расчетное расстояние видимости по-
верхности дороги SВ (расстояние видимости для остановки), которое устанавливается в зависимости от расчетной скорости движения vР , можно найти предельно допускаемое значение тормозного пути Sтор (м)
Sтор |
= SВ |
− SР |
− |
v0tпод |
, |
(4.23) |
|
||||||
|
|
|
3,6 |
|
|
|
где v0 – скорость движения транспортного средства в начальный момент тор-
можения, км/ч;
tпод – время подготовки к торможению (с), принимается равным 2 с. Величина тормозного пути Sтор может быть определена решением урав-
нения движения транспортного средства на спуске в режиме торможения, когда движущими силами являются составляющая силы тяжести направленная по уклону Pукл (сила скатывания) и сила инерции Pин , и специально создается допол-
нительное сопротивление движению в виде тормозящей силы Pтор
Pукл + Pин − PК − PВ − Pтор = 0. |
(4.24) |
Для упрощения решения уравнения (4.24) пренебрегают значением PВ ,
коэффициенты сопротивления качению и сцепления считают постоянными и рассчитывают соответственно по формулам (4.7) и (3.8) при v = 0,5v0 . Условно
считается, что торможение происходит при полной блокировке тормозящихся колес, то есть Pтор =Qторgλ =Qkторgλ , а значит, сила инерции вращающихся
масс равна 0, то есть δ =0. Если уравнение (4.24) разделить на Qg и учесть выше сказанное, то можно получить уравнение вида
i + j − f −kторλ = 0 . |
(4.25) |
Уравнение (4.25) – дифференциальное уравнение движения транспортно-
го средства в режиме торможения, так как j = ag = 1g dvdt . Решение этого урав-
нения при условии, что в начальный момент торможения (t = 0) v = v0 (км/ч), дает возможность найти величину тормозного пути Sтор (м)
Sтор = |
0,04K |
v2 |
|
|
|
Э 0 |
|
||
|
, |
(4.26) |
||
g (f + kторλ −i) |
||||
где KЭ – коэффициент эффективности торможения, учитывающий реальные
условия торможения и зависящий от состояния тормозной системы и коэффициента сцепления, принимаемый по табл. 4.3.

49
|
|
|
Таблица 4.3 |
Значения коэффициента эффективности торможения при ϕ > 0,4 |
|||
Типы транспортных |
|
Значения KЭ |
|
средств |
|
|
|
|
Без нагрузки |
С полной нагрузкой |
|
Легковые автомобили |
|
1,10…1,15 |
1,15…1,20 |
Грузовые автомобили с |
|
|
|
максимальной массой до |
|
|
|
10 т и автобусы длиной |
|
|
|
до 7,5 м |
|
1,10…1,30 |
1,50…1,60 |
Грузовые автомобили с |
|
|
|
максимальной массой |
|
|
|
более 10 т и автобусы |
|
|
|
длиной более 7,5 м |
|
1,40…1,60 |
1.60…1,80 |
Примечания: 1. При значениях коэффициента сцепления ϕ ≤0,4 для одиноч- |
|||
ных транспортных средств следует принимать KЭ =1. |
|||
2. При начальной |
скорости v0 ≥ 90 |
км/ч следует принимать |
|
KЭ = 2,3. |
|
|
|
3. Для автопоездов значения KЭ следует принимать по параметрам тягача и увеличивать в 1,3…1,4 раза при любых значениях ϕ.
Если приравнять правые части формул (4.23) и (4.26), то можно найти величину безопасного спуска iсп (доли единицы)
iсп = f + kторλ − |
0,04K |
Э |
v2 |
|
|
. |
(4.27) |
||
|
|
|
0 |
|
|
||||
|
|
|
|
v t |
под |
|
|||
|
g SВ |
− SР − |
0 |
|
|
||||
|
3,6 |
|
|||||||
|
|
|
|
|
|
|
|||
При выполнении расчетов по формуле (4.27) следует принимать v0 = vР
(км/ч), все остальные параметры принимаются согласно рекомендаций к выра-
жениям (4.24) – (4.26).
Порядок выполнения задания и исходные данные
1.Рассчитать значения касательной силы тяги на прямой передаче КП (iКП =1; iРК =1) для двух типов автотранспортных средств: легковой автомобиль, ав-
топоезд. Коэффициент использования мощности двигателя γ Д принять 0,9.
Марки транспортных средств принять по варианту (см. табл. 4.4), расчетные параметры транспортных средств представлены в табл. 4.5 – 4.9. Значениями частоты вращения коленчатого вала задаются: для дизельных двигателей в интервале от 900…1100 об./мин. до ne через 300…400 об./мин.; для карбю-
раторных двигателей легковых автомобилей – от 1600…1800 об./мин. до ne
через 750…1000 об./мин. 1 с–1 = 9,55 об./мин.
50
51
52
53
54
2.Вычислить значения касательной силы тяги на всех остальных передачах, путем умножения значения для прямой передачи на передаточное число КП для рассматриваемой передачи. Результаты представить в форме табл. 4.10.
3.Определить значения касательной силы тяги по сцеплению. Коэффициент сцепления принять по табл. 3.2, коэффициент тяговой силы принять: для автопоезда – 0,9ϕ; легкового автомобиля – 0,7ϕ.
4.Вычислить предельный подъем, на котором возможно трогание с места. Значение касательной силы тяги принять для первой передачи КП (при наличии
делителя или РК – на низшей передаче) с учетом ограничения по сцеплению. Ускорение принять: для автопоездов a =0,3 м/с2, для легковых автомобилей
a=0,5 м/с2.
5.Вычислить предельный подъем, который транспортное средство преодолевает на второй передаче КП (при наличии делителя или РК – на низшей передаче).
6.Определить безопасный спуск, расчетную скорость движения автопоезда принимать не более 80 км/ч. Результаты расчета уклонов представить в табл. 4.11. Коэффициент тормозной силы принять: для автопоезда – 0,9ϕ; легкового автомобиля – 0,9ϕ.
|
|
|
Таблица 4.11 |
|
Результаты определения допустимых продольных уклонов дороги |
||
|
Уклоны |
Транспортные средства |
|
|
|
легковой автомобиль |
автопоезд |
|
Максимальный |
|
|
|
продольный уклон |
|
|
|
(подъем) для трогания с |
|
|
|
места, ‰ |
|
|
|
Максимальный |
|
|
|
продольный уклон |
|
|
|
(подъем), |
|
|
|
преодолеваемый на вто- |
|
|
|
рой передаче КП, ‰ |
|
|
|
Безопасный спуск, ‰ |
|
|
|
Максимальный |
|
|
|
продольный уклон по |
|
|
|
СНиП 2.05.02-85*, ‰ |
|
|
|
|
|
|
7.Для принятого максимального продольного уклона дороги обосновать минимально допустимое значение коэффициента сцепления с учетом запаса на обеспечение сопротивления заносу, используя формулы: (4.2), (4.19), (4.22), (4.27). Результаты представить в табл. 4.12.
55
Таблица 4.12 Допустимые значения коэффициента сцепления при продольном уклоне ___ ‰
Условие |
Транспортное средство |
|
|
легковой автомобиль |
автопоезд |
Преодоление в режиме |
|
|
тягового усилия при |
|
|
постоянной скорости |
|
|
Трогание с места |
|
|
Безопасный спуск от |
|
|
расчетной скорости |
|
|
8.Оформить отчет. В выводах дать сравнительную оценку расчетных значений продольного уклона дороги и требуемого СНиП 2.05.02-85*, а также отразить требования к сцепным качествам покрытия дороги при принятом уклоне.
56
ЗАДАНИЕ № 5
Определение скоростей движения транспортных средств
Определение предельного безвредного спуска и скорости движения в режиме торможения
В зависимости от дорожных условий, которые определяют величины действующих на транспортные средства сопротивлений, возможны два режима движения транспортных средств: режим тягового усилия, когда движение происходит за счет энергии вырабатываемой двигателем и режим торможения, когда движение происходит за счет естественно движущих сил (силы скатывания и силы инерции). При действии на транспортное средство естественно движущих сил, сумма которых вдоль направления движения превышает сумму сил сопротивления движению, не требуется создание тягового усилия на ведущих колесах, то есть передача энергии от двигателя и движение описывается уравнением вида
Pукл − PК − PВ = Pин . |
(5.1) |
Из уравнения (5.1) следует, что при Pукл > PК + PВ транспортное средство
набирает скорость, причем без создания дополнительного сопротивления данный процесс не может регулироваться, а поэтому специально создается дополнительное сопротивление движению в виде тормозящей силы Pтор . В результа-
те действия тормозящей силы транспортное средство начинает терять скорость, но сила инерции при снижении скорости становится движущей силой и уравнение движения принимает вид (4.24).
Величина силы скатывания зависит от уклона (спуска), а следовательно существует спуск при котором происходит переход от режима тягового усилия к режиму торможения, данный переход имеет место при Pукл = PК + PВ .
Все спуски, на которых сопротивление движению превышает силу скатывания PК + PВ > Pукл , называются безвредными, а спуски, на которых сила ска-
тывания превышает сопротивление движению, называются вредными. Предельный безвредный спуск равен
i = |
PК + PВ |
. |
(5.2) |
|
|||
|
Qg |
|
|
Так как сопротивление воздушной среды величина не постоянная и зависящая от направления ветра, то предельный безвредный спуск из соображения обеспечения безопасности движения следует определять без учета сопротивления воздушной среды
i = |
PК |
= f = f0 + K f (v −20). |
(5.3) |
|
Qg |
||||
|
|
|
На всех спусках, которые по абсолютной величине больше предельного безвредного спуска и меньше безопасного спуска (см. табл. 4.11) происходит
57
движение транспортных средств в режиме торможения и скорость движения в этом случае устанавливается водителем в зависимости от дорожной обстановки, а по условию обеспечения безопасного движения она не должна превышать расчетной скорости движения для дороги, устанавливаемой в зависимости от категории.
На всех спусках, которые по абсолютной величине больше безопасного спуска движение происходит в режиме торможения, но скорость движения ограничивается для обеспечения остановки на расчетном расстоянии от препятствия. Зависимость между значениями опасных спусков и допустимых скоростей движения на них выражается формулой (4.27).
Определение скорости движения в режиме тягового усилия
Движение в режиме тягового усилия происходит на подъемах и безвредных спусках. В зависимости от частоты вращения коленчатого вала двигателя n (с–1) и передаточного числа трансмиссии iТ скорость движения транспортно-
го средства v (км/ч) рассчитывается по формуле |
|
v = 3,6rn . |
(5.4) |
i |
|
Т |
|
Таким образом, между значениями касательной силы тяги Fкас |
(кН) и ско- |
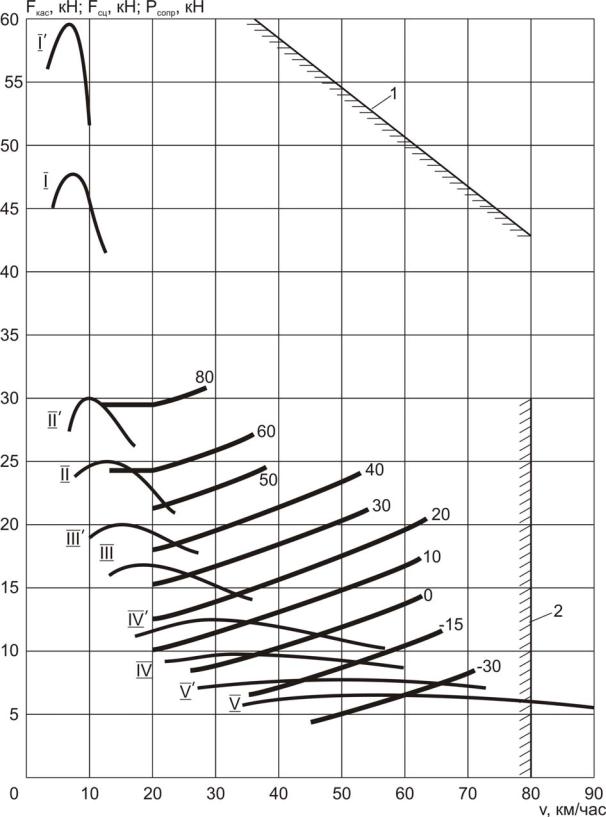
рости движения транспортного средства v (км/ч) существует зависимость (см. формулы (4.2) и (4.4)), графическое выражение которой называется тяговой характеристикой автомобиля или тягача.. Сопротивление движению также зависит от скорости, а поэтому уравнение движения транспортного средства (4.21) с постоянной скоростью, которая больше 20 км/ч удобно решать графическим способом с использованием тяговых характеристик (рис. 5.1).
На рис. 5.1 показана тяговая характеристика седельного тягача КамАЗ5410 с нанесенными кривыми сопротивления движению автопоезда КамАЗ- 5410+ОдАЗ-9370 полной массой 26,1 т и линией ограничения касательной силы тяги по сцеплению. При помощи тяговой характеристики удобно решать задачи по определению параметров режимов движения, а также предельных сопротивлений преодолеваемых транспортными средствами на различных передачах КП.
На тяговую характеристику автомобиля или тягача накладывают линии
ограничения |
касательной |
силы |
тяги |
по |
сцеплению |
Fсц =Qсцgϕ =Qсцg{ϕ0 − β (v −20)} |
и скорости (ограничивается значением рас- |
||||
четной скорости движения vР ), а также кривые суммарного сопротивления движению Pсопр равного
Pсопр = PК + PВ + Pукл = Qg{f0 + K f (v − 20)}+ 0,08kωv2 +Qgi . |
(5.5) |
Уклоны дороги i в формулу (5.5) подставляются в долях единицы, при скоростях 20…40 км/ч составляющую правой части 0,08kωv2 можно не учитывать.
58
I, II, III, IV, V – высшие передачи КП; I/, II/, III/, IV/, V/ – низшие передачи КП 1 – ограничение силы тяги по сцеплению; 2 – ограничение скорости движения; –30, –15, 0, 10, 20, 30, 40, 50, 60, 80 – продольные уклоны дороги (‰)
Рис. 5.1 Тяговая характеристика седельного тягача КамАЗ-5410 с нанесенными сопротивлениями движению автопоезда КамАЗ-5410+ОдАЗ-9370
59
Точки пересечения кривых касательной силы тяги Fкас в зоне ограничения по сцеплению Fкас ≤ Fсц с кривыми сопротивления движению показывают
скорость, на которой транспортное средство может преодолеть данный уклон. Вышеизложенную задачу также можно решить, используя зависимость динамического фактора D от скорости движения. Динамический фактор равен
D = |
FК − PВ |
. |
(5.6) |
|
|||
|
Qg |
|
|
С учетом формулы (5.6) Уравнение (4.20) можно привести к безразмерному виду
D − f −i − j = 0 , |
(5.7) |
Аналогично тяговой характеристике строится графическая зависимость D = f (v), и на нее наносятся линии сопротивления движению ω = f +i .
Порядок выполнения задания и исходные данные
1.Построить график зависимости предельного безвредного спуска от скорости движения.
2.Построить графики зависимости безопасного спуска от скорости движения. Значение коэффициента сцепления принять по табл. 3.2 и табл. 4.12.
3.Используя исходные данные и рекомендации по выполнению задания № 4
рассчитать значения скорости движения на прямой передаче КП (iКП =1; iРК =1) для двух типов автотранспортных средств: легковой автомобиль, автопоезд.
4.Вычислить значения скорости движения на всех остальных передачах, путем деления значения для прямой передачи на передаточное число КП для рассматриваемой передачи. Результаты представить в форме табл. 5.1.
5.Построить тяговые характеристики легкового автомобиля и тягача автопоезда.
6.Рассчитать и нанести на тяговые характеристики кривые сопротивления движению при уклонах (‰): –20; –10; 0; 10; 20; 30; 40; 50; 60. Габаритная ширина и высота транспортных средств приведены в табл. 5.2.
7.Установить передачи КП, на которых возможно движение при действующих сопротивлениях и ограничениях по сцеплению. Определить скорости движения. Результаты свести в табл. 5.3.
8.Оформить отчет. В выводах дать характеристику режимов движения транспортных средств.
60
61
Таблица 5.3 Скорости движения транспортных средств в различных дорожных условиях
Уклон, ‰ |
Легковой автомобиль |
Автопоезд |
||
номер |
скорость, |
номер |
скорость, |
|
|
передачи КП |
км/ч |
передачи КП |
км/ч |
–60 |
|
|
|
|
–50 |
|
|
|
|
–40 |
|
|
|
|
–30 |
|
|
|
|
–20 |
|
|
|
|
–10 |
|
|
|
|
0 |
|
|
|
|
10 |
|
|
|
|
20 |
|
|
|
|
30 |
|
|
|
|
40 |
|
|
|
|
50 |
|
|
|
|
60 |
|
|
|
|
62
ЗАДАНИЕ № 6
Трассирование дороги по карте.
Измерение расстояний между вершинами углов поворота. Определение величин углов поворота
Трассирование дороги
Трасса – сложная линия, закрепленная на местности или нанесенная на карту, план или аэрофотоснимки и определяющая в пространстве положение оси дороги. Трасса представляет собой ортогональную проекцию оси дороги на естественную поверхность земли. Трассирование – процесс проложения дороги на местности или по карте. Предварительное трассирование дороги производится по карте, плану или аэрофотоснимкам (камеральное трассирование), что позволяет выбрать направление с учетом особенностей рельефа местности, подобрать необходимые радиусы кривых. Трассирование на местности предполагает прокладку трассы дороги по материалам, полученным при камеральном трассировании с корректировкой параметров, которая обуславливается местными особенностями, не указанными на картах, планах или аэрофотоснимках.
При камеральном трассировании проводится карандашом линия, соединяющая по прямой опорные точки трассы: начало трассы (НТ) и конец трассы (КТ). Полученная линия называется – воздушная линия. Вблизи воздушной линии определяется расположение пониженных точек на водоразделах, устанавливаются наиболее удобные места перехода через реки, болота и т.п. Подобные точки, через которые заведомо целесообразно или необходимо проложить трассу, называются фиксированными. С учетом опорных и фиксированных точек определяются варианты направления проектируемой линии.
Рельеф местности обусловливает сложность проложения трассы. По трудности укладки трассу разделяют на участки: вольного хода, на которых естественные уклоны местности меньше наибольшего продольного уклона дороги; стесненного хода, где естественные уклоны местности больше принятой величины наибольшего продольного уклона дороги. Участки трассы вольного хода прокладывают по наикратчайшему направлению через фиксированные точки с обходом контурных препятствий небольшими углами поворота (до 20 град.) с таким расчетом, чтобы препятствие находилось с внутренней стороны кривых, разбиваемых на углах поворота.
На участках стесненного хода при особо сложном рельефе местности следует сделать несколько вариантов трассы и выбрать наилучший. При трассировании необходимо максимально использовать наибольший уклон трассирования, т.е. наибольший продольный уклон дороги. Для этого необходимо определить, какому заложению, то есть расстоянию на карте между двумя горизонталями, соответствует данный уклон трассирования iтр . При масштабе кар-
ты 1: М длина отрезка l (мм), размещаемого между горизонталями для обеспечения заданного уклона iтр (‰), равна
63
l = 106 h ,
Мiтр
где h – высота сечения рельефа горизонталями, м.
iтр =iР −iэк ,
(6.1)
(6.2)
где iР – руководящий уклон – наибольший продольный уклон дороги, ‰;
iэк – эквивалентный уклон, который учитывает сопротивление от кривой, и
вводиться при радиусах 100 м и менее (см. табл. 12 СНиП 2.05.02-85* или табл. 2.12), ‰.
Направление трассы с естественными уклонами, равными уклону трассирования iтр будет соблюдаться в том случае, когда длина ее между каждой па-
рой соседних горизонталей будет равняться величине l , для этого из точки, лежащей на горизонтали, раствором циркуля величиной l засекают следующую горизонталь, из полученной точки пересечения засекают так же следующую горизонталь и так далее. Соединяя точки, образованные засечками, получают ломаную линию, имеющую на всем протяжении уклон iтр . Данная ломаная явля-
ется ведущей линией плана, или линией нулевых работ. Ориентируясь на эту линию, на карту наносят пробную спрямленную трассу, стараясь расположить ее возможно ближе к ведущей линии и составляя ее из прямых участков и закруглений с радиусами, не менее допускаемых по СНиП 2.05.02-85* и обоснованных в задании № 3. Кривые малых радиусов вызывают дополнительное сопротивление движению и могут быть допущены в исключительных случаях. Для лучшего развития линии углы поворота должны назначаться достаточно большими (не менее 30…40 град.). В то же время не следует допускать развития линии больше, чем это необходимо для преодоления данного крутого подъема или спуска.
В общем случае при трассировании участков, как вольного, так и стесненного ходов следует придерживаться также следующих правил: болота пересекать в самом узком и неглубоком месте, овраги обходить, при обходе оврагов трасса должна располагаться не ближе 70…100 м от его вершины; пересечения существующих дорог производить на прямых участках пути и по возможности ближе к прямому углу; избегать резкого перехода от кривых большого радиуса к кривым малого радиуса; пересечение рек производить в наиболее узкой части поймы на прямых участках русла в высоких берегах, большие водотоки желательно пересекать по нормали к направлению течения.
Малые и средние мосты, а также трубы под насыпями допускается располагать при любых сочетаниях элементов плана и профиля для того, чтобы не вызывать искривления трассы и удлинения дороги ради удобства пересечения небольших рек, ложбин, оврагов. В то же время, учитывая большую экономичность перпендикулярного пересечения водотоков, желательно по возможности пересекать их ближе к прямому углу. Особенно это относится к дорогам низких категорий.
64
Населенные пункты надо обходить, приближаясь к ним не менее чем на 200 м. Следует так же обходить особо охраняемые территории, леса 1-ой группы, особо ценные сельскохозяйственные угодья, места расположения памятников природы, культуры, археологии.
Измерения трассы
Первоначально проложенная трасса дороги представляет собой ломаную линию, состоящую из отрезков длиной S(k −1)−k (м), индекс k означает номер
вершины угла поворота. Отрезков ровно на 1 больше, чем вершин углов поворота. Каждый такой отрезок имеет определенное направление (по отношению к сторонам света), которое определяется углом ориентирования. Различают следующие углы ориентирования: азимут A – угол, отсчитываемый по ходу часовой стрелки от северного направления меридиана до заданного направления; румб r – угол, отсчитываемый от ближайшего направления меридиана до заданного направления, который помимо величины характеризуется направлением. В зависимости от используемых при ориентировании меридианов углы ориентирования бывают: астрономический азимут Aист и астрономический румб
rист (отсчет ведется от астрономического или истинного меридиана); магнитный азимут Aмаг и магнитный румб rмаг (отсчет ведется от магнитного мери-
диана). Магнитный и астрономический азимуты связаны между собой зависимостью
Aист = Aмаг +δ , |
(6.3) |
где δ – склонение магнитной стрелки, град.
При проложении дорог на местности пользуются магнитными азимутами и румбами, которые измеряются при помощи прибора называемого буссоль.
На карте невозможно измерить магнитный или истинный азимуты, но легко при помощи обычного или геодезического транспортира измерить дирекционный угол α , который представляет собой угол, отсчитываемый по ходу часовой стрелки от северного направления осевого меридиана или от северного направления вертикальных осей координатной (километровой) сетки до заданного направления. Угол, отсчитываемый от ближайшего направления осевого меридиана или вертикальных осей координатной сетки до заданного направления, называется румбом r . Дирекционный угол и астрономический азимут свя-
заны между собой зависимостью |
|
Aист =α +γ , |
(6.4) |
где γ – угол сближения меридианов, град.
Углы δ и γ определяются по схеме, приведенной в зарамочном оформ-
лении карты, если угол склонения магнитной стрелки или сближения меридианов восточный, то его значение положительное, а если западный, то его значение отрицательное.
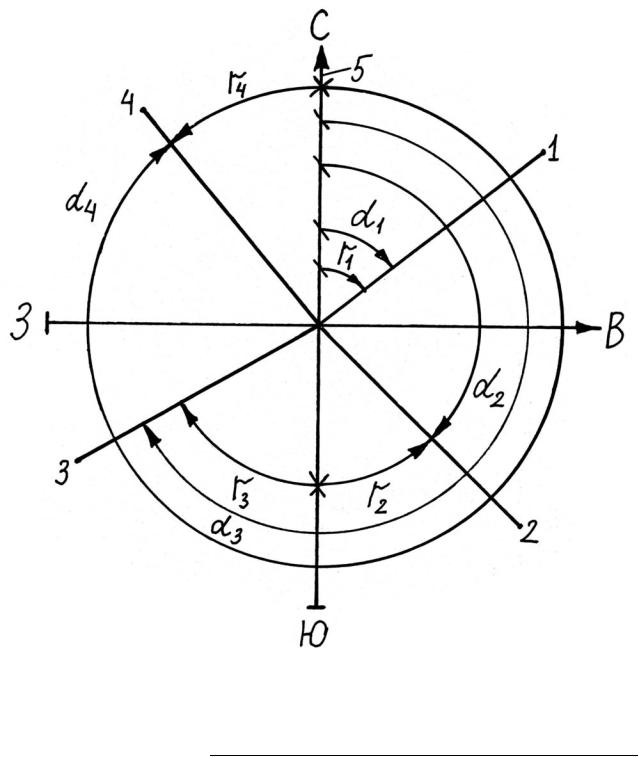
Между румбами и азимутами или дирекционными углами существует строго определенная зависимость (см. рис. 6.1 и табл. 6.1).
65
1, 2, 3, 4 – ориентируемые направления; 5 – меридиан Рис. 6.1 Связь между дирекционными углами (азимутами) и румбами
|
|
|
Таблица 6.1 |
Зависимость румба r от дирекционного угла α или азимута A |
|||
Дирекционный |
|
Румб |
|
угол, град. |
направление |
|
значение, град. |
0...90 |
СВ |
|
r =α |
90...180 |
ЮВ |
|
r =180 −α |
180...270 |
ЮЗ |
|
r =α −180 |
270...360 |
СЗ |
|
r =360 −α |
Примечание. СВ – северо-восток; ЮВ – юго-восток; ЮЗ – юго-запад; СЗ – се- веро-запад.
66
Изменение направления трассы называется поворотом, а угол между продолжением k -го отрезка ломаной трассы и ( k +1)-ым отрезком называется углом поворота θ , узловые точки ломаной трассы называются вершинами углов поворота (ВУ), а расстояния (длины отрезков ломаной трассы) S(k −1)−k – рас-
стояниями между вершинами углов поворота.
Углы поворота и их вершины нумеруются арабскими числами по ходу направления трассы. В зависимости от направления углы поворота бывают правые (угол поворота «право») и левые (угол поворота «лево»), правые углы считаются положительными, а левые – отрицательными. Если дирекционный угол или азимут направления от НТ к вершине первого угла поворота (ВУ1) обозначить αНТ−1 , то дирекционный угол направления от ВУ1 к ВУ2 α1−2 будет
равен |
|
α1−2 =αНТ−1 +θ1 , |
(6.5) |
где θ1 – величина угла поворота № 1, град. |
|
Дирекционный угол или азимут направления от вершины k -го угла поворота (ВУk ) к вершине ( k +1)-го (ВУ(k +1)) αk−(k+1) , а так же дирекционный
угол или азимут направления от вершины последнего n -го угла поворота (ВУn ) к КТ αn−КТ равны
αk−(k+1) =α(k−1)−k +θk ; αn−КТ =α(n−1)−n +θn , |
(6.6) |
где α(k−1)−k , α(n−1)−n – соответственно дирекционные углы или азимуты направ-
лений от ВУ(k −1) к ВУk и от ВУ(n −1) к ВУn , град.;
θk , θn – соответственно величины k -го и n -го углов поворота, град.;
n– количество углов поворота на трассе.
Впроцессе изыскания дороги или камерального трассирования измеряют магнитный азимут (на местности) или дирекционный угол (по карте) направления от НТ к ВУ1, а азимуты или дирекционные углы остальных направлений вычисляют по формулам (6.5) и (6.6), для контроля вычислений дополнительно измеряют азимут или дирекционный угол направления от ВУn к КТ.
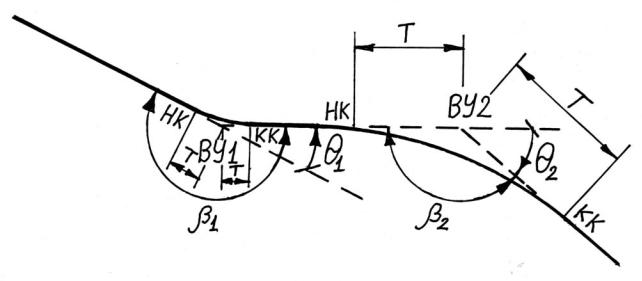
Вполевых условиях углы поворота непосредственно не измеряют, а вычисляют в зависимости от внутренних углов ломаной трассы βk . Если измере-
ны внутренние углы βk , расположенные справа по направлению трассы (пра-
вые по ходу углы), то угол поворота «право» будет равен |
|
θk =180 − βk . |
(6.7) |
Угол поворота «лево» составляет |
|
θk = βk −180 . |
(6.8) |
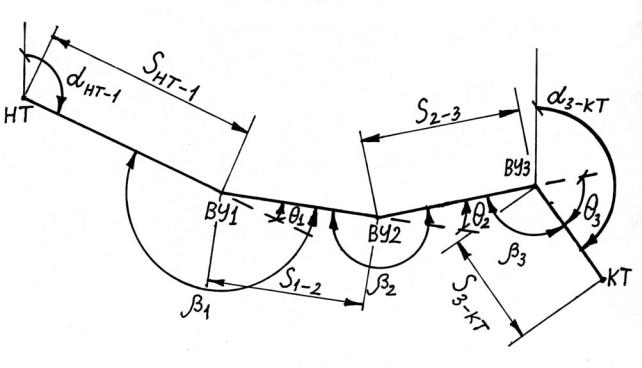
Ломаная трассы с измеряемыми параметрами и углами поворота показана на рис. 6.2.
При камеральном трассировании допускается непосредственное измерение углов поворота. Для этого продолжают первоначальное направление трас-
67
сы от вершины угла поворота, и полученный угол между продолжением первоначального направления и новым направлением измеряют геодезическим транспортиром.
Рис. 6.2 Схема измерений дорожной трассы и определения величин углов поворота
Порядок выполнения задания и исходные данные
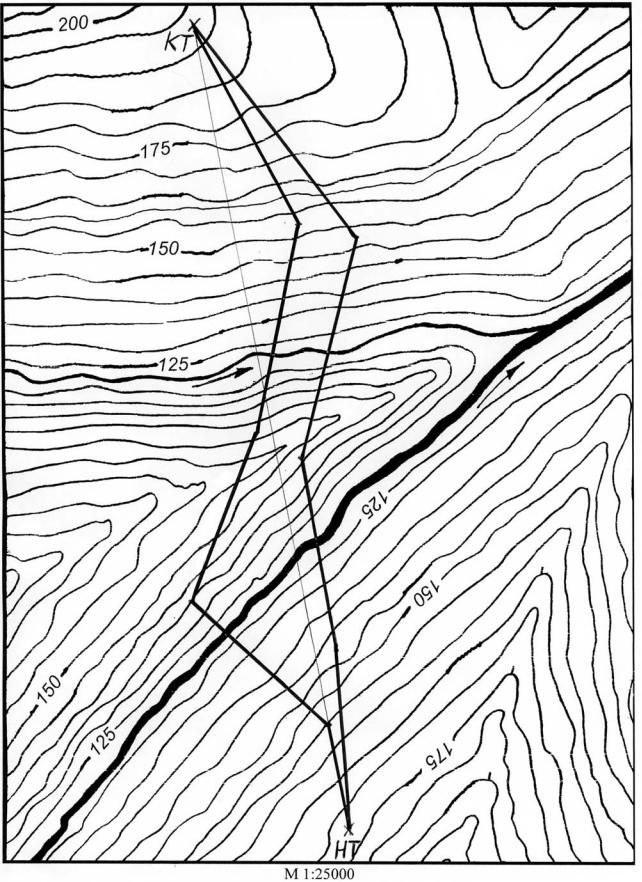
1.На карте соединить тонкой прямой линией опорные точки трассы НТ и КТ. Измерить длину полученной воздушной линии.
2.Используя рекомендации по трассированию дорог проложить в виде ломаных линий два варианта трассы между НТ и КТ. На рис. 6.3 показан пример нанесения вариантов трассы на карту.
3.У каждого варианта трассы обозначить ВУ, нумеруя их по направлению от НТ до КТ.
4.В ведомость прямых и кривых (составляется отдельно для каждого варианта трассы) записывают в первый столбец через строчку: НТ, ВУ1, ВУ2, …, ВУk , …, ВУn , КТ.
5.Измерить длины отрезков ломаной трассы (расстояния между вершинами) и записать их в соответствующий столбец ведомости в пустые строки между точками, ограничивающими данный отрезок.
6.Измерить углы поворота и записать их значения в соответствующие столбцы ведомости для углов «право» и «лево» в те же строки, где записаны номера вершин.
7.Измерить дирекционный угол направления от НТ на ВУ1 и записать его в соответствующий столбец ведомости в строку между НТ и ВУ1. Вычислить дирекционные углы оставшихся направлений трассы и записать их в ведомость.
68
Рис. 6.3 Пример нанесения вариантов трассы на карту
69
8.Для контроля измерить дирекционный угол направления от ВУn на КТ и сравнить его с вычисленным значением. Если они отличаются более чем на 1 град. при измерении обычным транспортиром и более чем на 30 мин. при измерении геодезическим транспортиром, то необходимо заново выполнить измерения углов поворота и дирекционного угла направления от НТ на ВУ1, вычисление дирекционных углов и произвести проверку.
9.Определить румбы направлений и занести их в ведомость.
10.Оформить отчет. В выводах дать характеристику разработанных вариантов трассы: количество углов поворота, общее направление, длину, пересекаемые водотоки, болота, водоразделы.
70
ЗАДАНИЕ № 7
Проектирование плана трассы. Составление ведомости прямых и кривых. Определение отметок пикетов и плюсовых точек по карте
Проектирование плана трассы. Составление ведомости прямых и кривых
При движении транспортные средства не могут резко изменить направление движения, причем, чем выше скорость движения, тем сложнее изменить его направление, а поэтому для обеспечения удобного и безопасного движения транспортных средств на участках изменения направления устраивают кривые, которые обеспечивают постепенное изменение направления без снижения скорости или с незначительным снижением последней. Кривая вписывается во внутренний угол ломаной трассы смежный с углом поворота, таким образом, чтобы лучи, образующие данный угол были касательными к кривой (рис. 7.1). Точки, в которых кривая касается лучей внутреннего угла ломаной трассы, называются: начало кривой (НК) и конец кривой (КК), а расстояния от НК до ВУ от ВУ до КК называются тангенсами и обозначаются T1 , T2 (рис. 7.1).
Рис. 7.1 Вписывание кривых в ломаную дорожной трассы
Кривая дорожной трассы, может быть, простой в виде дуги окружности с радиусом R или сложной, образованной двумя переходными кривыми и дугой окружности с радиусом R , расположенной в середине кривой, которая называется основной кривой. Сложные кривые бывают симметричные и несимметричные. В качестве переходной кривой применяется дуга клотоиды длиной L , на протяжении которой радиус ρ постепенно уменьшается от ∞ в точке касания к прямому участку до радиуса основной кривой R в точке перехода от дуги клотоиды к дуге окружности.
Радиусы кривых должны назначаться в нормальных условиях не менее 3000 м. Если размещение кривой с радиусом 3000 м и более не возможно, то допускается применение радиусов величиной до 3000 м, но не менее указанных
71
в табл. 10 СНиП 2.05.02-85* и обоснованных в задании № 3. Во всех случаях следует назначить стандартные значения радиусов кривых (м): 5000; 4000; 3000; 2500; 2000; 1500; 1000; 800; 700; 600; 500; 400; 300; 250; 200; 150; 125; 100; 60; 30; 25; 20; 15.
При малых углах поворота (8 град. и менее) рекомендуется применение радиусов, указанных в п. 4.34 СНиП 2.05.02-85* или табл. 2.16..
Радиус кривой в плане обосновывают исходя из возможности размещения смежных кривых и устройства между ними прямой вставки, или переходных кривых, ограничения длин прямых вставок (см. п. 4.35 СНиП 2.05.02-85* или табл. 2.15). Следует учитывать, что пересечение существующих дорог, водотоков, лощин более рационально осуществлять прямыми участками (прямыми вставками). Зная расстояние между вершинами углов поворота S(k −1)−k , расстоя-
ния от вершин до пересекаемых объектов (дорог, водотоков) можно выбрать величину радиуса R = S /tg θ2 , где S – расстояние от ВУ до пересекаемого объ-
екта, если на участке между двумя ВУ нет объектов, которые следует пересечь прямой вставкой, то радиусы смежных кривых выбирают исходя из возможности размещения кривых и устройства между ними прямой вставки длиной C , в этом случае S(k−1)−k =C +Tk−1 +Tk , где Tk −1 , Tk – соответственно тангенсы круго-
вых кривых, устраиваемых в ВУ(k −1) и ВУk и определяемые по формуле
(7.1), м.
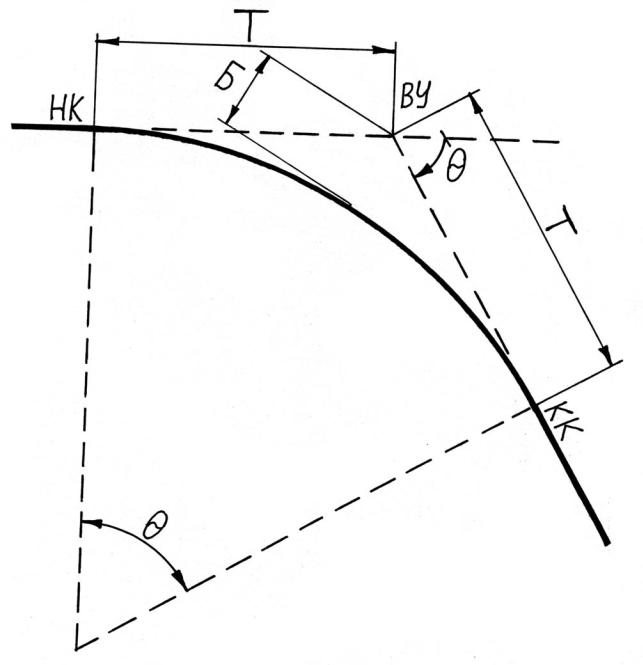
Простая кривая, представляющая собой дугу окружности с радиусом R , устраивается на автомобильных дорогах общего пользования при R > 2000 м, а на подъездных дорогах (внешних дорогах предприятий) при R > 400 м. Данная кривая показана на рис. 7.2. она характеризуется следующими параметрами:
а) тангенс T
|
|
T = R tg θ |
; |
|
|
(7.1) |
||||
б) кривая (длина кривой) K |
|
2 |
|
|
|
|
||||
|
|
Rθ |
|
|
|
|
|
|||
|
|
|
K = |
|
; |
|
|
(7.2) |
||
|
|
|
|
|
|
|||||
|
|
|
|
57,3 |
|
|
|
|
||
в) биссектриса – расстояние от ВУ до середины кривой Б |
|
|||||||||
Б = T |
2 |
+ R |
2 |
− R = R |
|
−1 θ |
|
(7.3) |
||
|
|
cos |
2 |
−1 . |
||||||
|
|
|
|
|
|
|
|
|
|
|
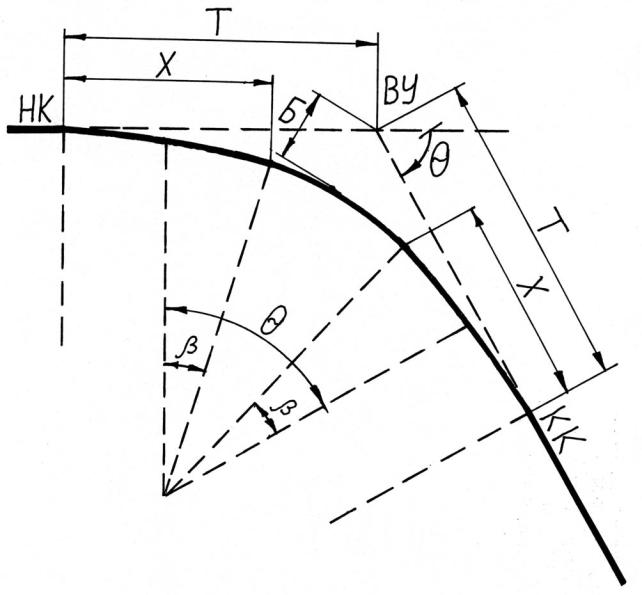
СНиП 2.05.02-85* рекомендует на дорогах общего пользования при R равном 2000 м и менее, на подъездных дорогах к промышленным предприятиям при R равном 400 м и менее устраивать сложные кривые, которые состоят из двух переходных кривых – клотоид, примыкающих с двух сторон к круговой (основной) кривой, имеющей радиус R . На внутренних дорогах промышленных предприятий СНиП 2.05.07-91* рекомендует устраивать переходные кривые при R равном 250 м и менее. Если клотоиды имеют одинаковую длину L ,
72
то такая кривая называется симметричной (см. рис. 7.3). Длина клотоиды L назначается в соответствии с табл. 11 СНиП 2.05.02-85* (см. табл. 2.11) и табл. 54 СНиП 2.05.07-91*, она должна обеспечивать величину нарастания центробежного ускорения J не более допускаемой, то есть принимаемая длина клотоиды
L должна быть больше величины определяемой по формуле |
|
|
L = C |
, |
(7.4) |
R |
|
|
где C = A2 = RL – параметр клотоиды, м.
Рис. 7.2 Простая кривая (дуга окружности)
73
Рис. 7.3 Сложная симметричная кривая (две клотоиды одинаковой длины и дуга окружности)
Каждая переходная кривая обеспечивает поворот на угол β (град.), рав-
ный |
L |
|
|
L3 |
|
|
|
L2 |
|
|
|
||
β =arctg |
Y / |
; Y / = |
− |
|
; |
X / =1− |
. |
|
(7.5) |
||||
|
|
48R3 |
8R2 |
|
|||||||||
|
X / |
2R |
|
|
|
|
|
|
|||||
Круговая кривая обеспечивает поворот на угол θ −2β , а разбивка кривой |
|||||||||||||
с переходными кривыми длиной L возможна, если θ ≥ 2β . При θ = 2β кривая |
|||||||||||||
состоит из двух клотоид и называется биклотоидой. |
|
|
|
|
|||||||||
Тангенс симметричной кривой равен |
|
|
|
|
L3 |
|
|
|
|||||
T = X +(R + p)tg |
θ − Rsin β ; |
X = L − |
|
|
, |
(7.6) |
|||||||
|
40R2 |
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
||

74
где X – абсцисса конца клотоиды (длина ортогональной проекции клотоиды на тангенс), м;
p – сдвижка основной кривой, образованная переходными кривыми, м.
p =Y − R(1−cos β), |
(7.7) |
где Y – ордината конца клотоиды, м.
Y = |
L2 |
− |
L4 |
. |
|
6R |
336R3 |
||||
|
|
|
Длина симметричной кривой (кривая) K равна
K = 2L + R(θ − 2β ) . 57,3
Биссектриса симметричной кривой Б
Б =(R + p)cos−1 θ2 − R .
(7.8)
(7.9)
(7.10)
В случае, когда клотоиды, примыкающие с обеих сторон к основной кривой имеют разные длины L1 и L2 , кривая будет несимметричной, она имеет
разные тангенсы T1 и T2 (рис. 7.4), каждая клотоида дает поворот на соответствующий угол β1 и β2 , а условие разбивки кривой с такими клотоидами будет θ ≥ β1 + β2 . Углы β1 и β2 определяются по формулам (7.5) в зависимости от длин клотоид L1 и L2 . Сдвижки основной кривой образованные клотоидами будут разные и составят p1 и p2 , они рассчитываются по формулам (7.7) и (7.8) в зависимости от L1 и L2 . Разница сдвижек компенсируется сокращением тан-
генса со стороны более длиной клотоиды и увеличением тангенса со стороны короткой клотоиды (за счет смещения центра основной кривой) на величину z , равную
|
|
|
|
|
z = |
p2 − p1 |
. |
|
|
|
|
(7.11) |
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Тангенсы T1 и T2 составят |
|
sinθ |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T = X |
1 |
+(R + p )tg θ − Rsin β + z ; |
T = X |
2 |
+(R + p |
)tg |
θ − Rsin β |
2 |
− z . |
|||||||
1 |
|
1 |
2 |
|
1 |
|
2 |
2 |
|
2 |
|
|||||
В формулах (7.12) |
|
|
|
|
|
|
|
|
|
|
|
(7.12) |
||||
X1 и X2 определяются по формуле (7.6) в зависимости |
||||||||||||||||
от L1 и L2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Длина несимметричной кривой K равна |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
K = L |
+ L |
+ |
R(θ − β1 − β2 ) |
. |
|
(7.13) |
||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
1 |
2 |
|
|
57,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При устройстве кривой длина трассы сокращается на величину домера Д |
||||||||||||||||
равного |
|
|
|
Д = 2T − K ; Д =T1 +T2 − K . |
|
(7.14) |
||||||||||
|
|
|
|
|
||||||||||||
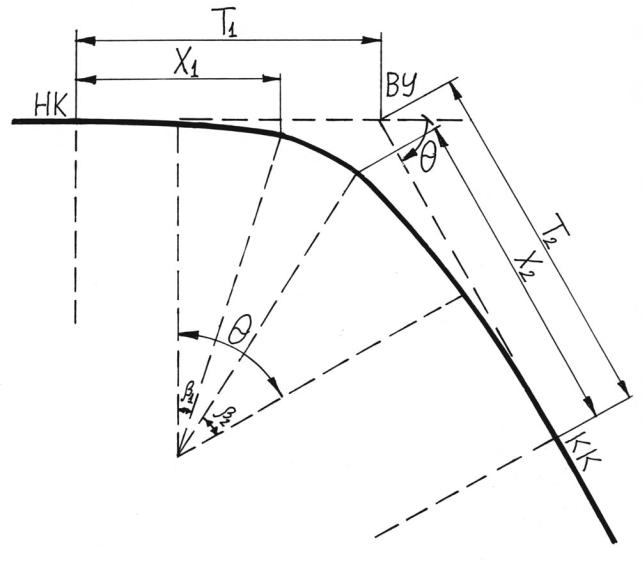
75
Рис. 7.4 Сложная несимметричная кривая (две клотоиды разной длины и дуга окружности)
Трасса делится на участки длиной 100 м, которые называются пикетами и на участки длиной 1000 м, которые называются километры, десять пикетов образуют километр. Положение точек трассы определяют в пикетажном выражении вида ПК A + B , где A – номер пикета на котором расположена точка; B – расстояние от начала данного пикета до рассматриваемой точки, м. Положение точек трассы можно задавать в километровом выражении вида км C + D , где C
– километр на котором расположена точка; D – расстояние от начала данного километра до рассматриваемой точки, м. Пикеты и километры разбивают от НТ начиная с нулевого (ПК 0; км 0). После каждой вершины угла поворота откладывают величину домера, рассчитанную в зависимости от параметров кривой, вписываемой в данный угол, которая не учитывается при разбивке пикетов, то есть остаток длины пикета после ВУ откладывается больше своей длины на величину домера (например, если ВУ имеет пикетажное положение ПК 25+35,82,
76
то после ВУ до ПК 26 необходимо отложить расстояние, равное 100– 35,82=64,18 м, но так как после устройства кривой длина трассы сократится на Д , то требуется от ВУ отложить расстояние равное Д +64,18 ).
Положение НК и КК при разбивке кривой устанавливают путем отмера тангенсов от ВУ в соответствующую сторону: для установления НК к НТ, а КК
– к КТ. Пикетажное положение НК и КК определяют по зависимостям: |
|
НК=ВУ–T ; КК=НК+ K , |
(7.15) |
где ВУ – пикетажное положение вершины угла поворота. |
|
Пикетажное положение начала основной кривой (НОК) и конца основной
кривой (КОК) соответственно равно: |
|
НОК=НК+ L1 ; КОК=КК– L2 , |
(7.16) |
Пикетажное положение ВУ определяется по формулам: |
|
ВУ1= SНТ−1 ; ВУk =ВУ(k −1)+ S(k−1)−k – Дk −1 ; ВУn =ВУ(n −1)+ S(n−1)−n – Дn−1 . |
|
Пикетажное положение КТ равно |
(7.17) |
|
|
КТ= ВУn + Sn−КТ – Дn . |
(7.18) |
Длина прямой вставки П равна |
|
ПНТ−1 =НК1; П(k−1)−k =НКk –КК(k −1); Пn−КТ =КТ–ККn , |
(7.19) |
где НК1, НКk – соответственно пикетажные положения начала кривых 1-го и k -го углов поворота;
КК(k −1), ККn – соответственно пикетажные положения концов кривых (k −1)-го и n -го углов поворота.
Детальная разбивка кривых и вынос пикетов на кривые производятся от НК и КК, при этом удобно использовать способ прямоугольных координат. Начало координат совмещается с НК или КК, ось абсцисс направляется по тангенсу к ВУ, ось ординат перпендикулярно оси абсцисс в сторону центра кривой. Задаваясь текущей координатой положения точки на кривой s , которая представляет собой расстояние по кривой от НК или КК до рассматриваемой точки
(м), вычисляют прямоугольные координаты x и y |
этой точки в принятой сис- |
||||||||||||||||
теме координат. Если кривая состоит только из дуги окружности, то |
|
||||||||||||||||
|
x = Rsin |
s |
|
|
|
|
|
s |
|
|
|
|
|
||||
|
|
|
; y = R 1−cos |
|
. |
|
|
|
(7.20) |
||||||||
R |
R |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если кривая сложная, то в пределах клотоиды ( s ≤ L ) координаты будут |
|||||||||||||||||
равны |
|
s5 |
|
|
|
|
s3 |
|
|
|
s7 |
|
|
|
|
||
x = s − |
|
|
|
|
; y = |
− |
|
|
. |
|
|
(7.21) |
|||||
|
40(RL)2 |
|
6RL |
336 |
(RL)3 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
В пределах основной кривой, когда s > L |
|
|
|
|
|
|
|
|
|||||||||
x = X + R sin |
s − L |
|
+ β −sin β ; |
y = p + R 1−cos |
s − L |
+ β |
. (7.22) |
||||||||||
|
|
||||||||||||||||
R |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|||
77
В формулах (7.20), (7.21) и (7.22) все угловые параметры измеряются в
рад.
Все количественные характеристики элементов плана трассы заносят в ведомость прямых и кривых (табл. 7.1). В данной ведомости после строки, со-
m
ответствующей КТ записывают суммы: углов поворота правых ∑θпрe и левых
e=1
n−m
∑θлевe ( m – количество правых углов поворота из общего числа углов поворо-
e=1
n |
+T2 e ) |
|
|
та n ), тангенсов ∑(T1e |
(T1e , T2 e – тангенсы e -ой несимметричной кривой, |
||
e=1 |
|
|
|
|
|
n |
n |
если кривая симметричная, |
то T1e +T2 e = 2Te ), кривых ∑Ke , домеров |
∑Дe , |
|
|
|
e=1 |
e=1 |
u |
|
|
|
прямых вставок ∑Пe |
(u – |
количество прямых вставок), расстояний между |
|
e=1
вершинами углов и выполняют проверку результатов расчета параметров трассы исходя из следующих требований:
m |
n−m |
n |
n |
n |
αn−КТ –αНТ−1 = ∑θпрe |
− ∑θлевe ; ∑Ke |
+ ∑Дe |
= ∑(T1e +T2 e ); |
|
e=1 |
e=1 |
e=1 |
e=1 |
e=1 |
n |
u |
∑Ke + ∑Пe |
|
e=1 |
e=1 |
n+1 |
n |
|
= ∑Se |
−∑Дe =КТ. |
(7.23) |
e=1 |
e=1 |
|
Пример оформления плана трассы показан на рис. 7.5.
Определение отметок пикетов и плюсовых точек по карте
Отметки (высоты относительно уровня моря или в условной системе высот) пикетов и плюсовых точек берут с плана дороги, нанесенного на карту. Если по трассе между двумя смежными пикетами наблюдается неравномерность изменения рельефа (бугры, ямы и т.д.) то на данном участке (пикете) необходимо ввести плюсовые точки, которые будут использоваться при построении продольного профиля. Отметки поверхности земли определяют методом интерполяции или экстраполяции (рис. 7.6). В первом случае (рис. 7.6а) отметку
пикета или полюса Н определяют по формуле |
(l −a)h |
|
|
Н = HНГ + x = HНГ + |
, |
(7.24) |
|
|
l |
|
|
где HНГ – отметка нижней горизонтали, м;
x – превышение пикета или плюсовой точки над нижней горизонталью, м; a – расстояние от верхней горизонтали до пикета или плюсовой точки, измеряемое по плану, мм;
h – высота сечения рельефа горизонталями, м;
l – расстояние между горизонталями, между которыми находится пикет или плюсовая точка, измеряемое по плану, мм.
78
79
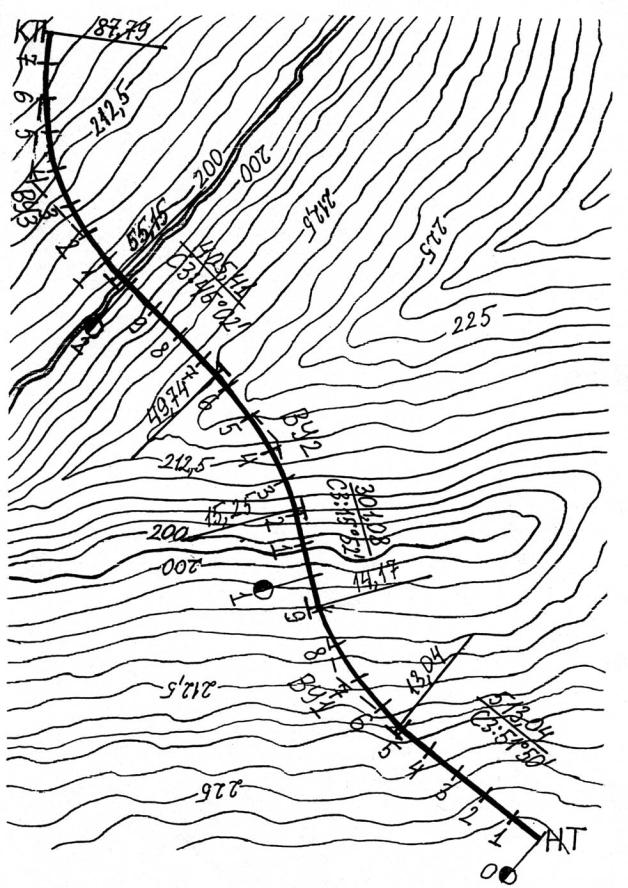
80
М 1:10000
Рис. 7.5 План трассы
81
1 – трасса; 2 – нижняя горизонталь; 3 – замкнутая горизонталь; 4 – внешняя горизонталь
а – метод интерполяции; б – метод экстраполяции Рис. 7.6 Схемы к определению отметок земли пикетов и плюсовых точек
При расположении пикета или плюсовой точки в пределах замкнутой или полузамкнутой горизонтали применяется метод экстраполяции (рис. 7.6б). В этом случае необходимо расстояние l измерить между основной (замкнутой) горизонталью и соседней (внешней), а расстояние a от пикета или плюсовой
82
точки до замкнутой или полузамкнутой горизонтали, а формула для расчета Н
следующая |
|
|
||
Н = НЗГ + x = НЗГ + |
a(НЗГ − НВГ ) |
, |
(7.25) |
|
l |
||||
|
|
|
||
где НЗГ , НВГ – соответственно отметки замкнутой и внешней горизонталей, м.
Ординаты точек линии земли d (мм) продольного профиля рассчитывают по формуле
d =1000 |
Н −УГ , |
(7.26) |
|
M В |
|
где УГ – величина условного горизонта кратная 10, принимаемая с таким расчетом, чтобы значения d составляли 50…100 мм;
M В – знаменатель вертикального масштаба продольного профиля
( M В = 500 ).
Порядок выполнения задания и исходные данные
1.Выбрать радиусы кривых для каждого варианта трассы и занести их в ведомости прямых и кривых.
2.Произвести расчет ведомостей прямых и кривых каждого варианта трассы. В каждом варианте трассы обязательно предусмотреть, одну несимметричную сложную кривую и одну симметричную, не зависимо от принятого значения минимального радиуса кривой в плане.
3.Выполнить проверку ведомостей прямых и кривых.
4.По данным ведомостей прямых и кривых и карте выполнить сравнение вариантов трассы и выбрать наилучший. Результаты представить в форме табл. 7.2.
5.На карте вычертить согласно образцу (см. рис. 7.5) принятый вариант трассы. На плане должны быть показаны: вершины углов поворота, пикеты, указатели километров, начало и конец кривых, длина и румбы прямых вставок. Следует обратить внимание на то, что тангенсы показываются пунктиром, а пикеты располагаются на кривых, а не на тангенсах.
Таблица 7.2
Сравнение вариантов трассы
|
Ед. |
Показатели |
Оценка по |
|||
Наименование показателей |
изме- |
по вариан- |
вариантам |
|||
|
рения |
|
там |
|
|
|
|
|
I |
|
II |
I |
II |
Дина трассы |
м |
|
|
|
|
|
Число углов поворота |
шт. |
|
|
|
|
|
Средняя величина угла поворота |
град. |
|
|
|
|
|
Средний радиус поворота |
м |
|
|
|
|
|
Минимальный радиус поворота |
м |
|
|
|
|
|
83
Окончание табл. 7.2
|
Еди- |
Показатели |
Оценка по |
|||
Наименование показателей |
ница |
|
по |
вариантам |
||
|
изме- |
вариантам |
|
|
||
|
рения |
I |
|
II |
I |
II |
Число пересекаемых водотоков: |
|
|
|
|
|
|
постоянных |
шт. |
|
|
|
|
|
временных |
шт. |
|
|
|
|
|
Протяженность участков, неблагоприят- |
м |
|
|
|
|
|
ных для устойчивости земляного полотна |
|
|
|
|
|
|
(болота, оползни, речные поймы, косого- |
|
|
|
|
|
|
ры и т.п.) |
|
|
|
|
|
|
Протяженность участков в населенных |
м |
|
|
|
|
|
пунктах, по особо ценным сельскохозяй- |
|
|
|
|
|
|
ственным угодьям, землям гослесфонда, |
|
|
|
|
|
|
территориям с высоким экологическим |
|
|
|
|
|
|
потенциалом |
|
|
|
|
|
|
Примечания: 1. В графы «Оценка по вариантам» ставят знак «+» для варианта имеющего преимущество по данному показателю и знак «–» для другого варианта, если показатели равноценны, то в графы ставят 0 каждому варианту.
2.По результатам сравнения выбирают вариант, у которого боль-
ше «+».
3.Средняя величина угла поворота определяется путем деления суммы углов поворота на количество углов поворота.
4.Средний радиус поворота определяется делением суммы кривых на сумму углов поворота, выраженную в рад.
6.Определить высоты пикетов (ПК 0…ПК 30) и плюсовых точек, последние обязательно следует выделить в местах пересечения дорогой: водораздельных линий (ВРЛ), тальвегов лощин, берегов рек и ручьев. Образец представления результатов – табл. 7.3. При выполнении задания принять расстояние между бровками берегов реки 25…30 м, ручьев – 5 м.
Таблица 7.3 Отметки пикетов и плюсовых точек (ПК 9…ПК 24 на рис. 7.5)
Пикет |
Плюс |
Отметка, м |
Условный |
Ордината, |
Примечание |
|
|
|
горизонт, м |
мм |
|
9 |
00 |
205,08 |
160 |
90 |
|
10 |
00 |
201,46 |
160 |
83 |
|
10 |
88,42 |
198,37 |
160 |
77 |
Берег |
10 |
93,42 |
198,35 |
160 |
77 |
Берег |
84
11 |
00 |
198,67 |
160 |
78 |
|
|
|
|
|
Окончание табл. 7.3 |
|
Пикет |
Плюс |
Отметка, м |
Условный |
Ордината, |
Примечание |
|
|
|
горизонт, м |
мм |
|
12 |
00 |
204,32 |
160 |
89 |
|
13 |
00 |
210,00 |
160/180 |
100/60 |
|
14 |
00 |
213,78 |
180 |
68 |
|
15 |
00 |
217,40 |
180 |
75 |
|
15 |
38,75 |
219,14 |
180 |
78 |
ВРЛ |
16 |
00 |
217,55 |
180 |
75 |
|
17 |
00 |
213,57 |
180 |
67 |
|
18 |
00 |
209,45 |
180/160 |
59/99 |
|
19 |
00 |
203,62 |
160 |
87 |
|
20 |
00 |
199,10 |
160 |
78 |
|
20 |
12,35 |
197,84 |
160 |
76 |
Берег |
20 |
44,57 |
197,80 |
160 |
76 |
Берег |
21 |
00 |
202,15 |
160 |
84 |
|
22 |
00 |
204,58 |
160 |
89 |
|
23 |
00 |
209,12 |
160 |
98 |
|
24 |
00 |
212,82 |
160 |
106 |
|
7.Оформить отчет. В выводах дать характеристику запроектированного плана дороги.
85
ЗАДАНИЕ № 8
Построение продольного профиля трассы в отметках земли. Установление характера поверхностного стока.
Размещение водопропускных сооружений
Построение продольного профиля в отметках земли
Продольный профиль уровня земли по трассе составляют по отметкам, взятым с карты, и вычерчивают на миллиметровой бумаге с шириной листа 297 мм или 420 мм в масштабах: горизонтальном – 1:5000 и вертикальном – 1:500. Для горной местности горизонтальный масштаб принимают – 1:2000, вертикальный – 1:200.
Построение профиля начинают с вычерчивания линии условного горизонта (УГ), за которую принимают одну из утолщенных линий миллиметровки на расстоянии 18 см от нижнего края бумаги. От линии УГ в масштабе для вертикальных расстояний откладываются вверх отметки пикетных и плюсовых точек – ординаты d (мм). Вершины смежных ординат соединяют прямыми линиями.
Продольный профиль дороги в отметках земли представляет собой ломаную линию, состоящую из отрезков длиной 100 м и менее 100 м. Эта линия называется линией земли.
Под профилем ниже линии УГ располагается пояснительная сетка (таблица) по форме, показанной на рис. 8.1, включающая следующие графы.
Графа 1 – «Развернутый план дороги». Здесь посреди графы проводится линия, показывающая проектируемую дорогу. Указывают ситуацию вдоль трассы – лес, болота, пашня, луг, пересекаемые дороги, водотоки, направление стока поверхностных вод (стрелками); положение разведочных геологических выработок (шурфов и скважин). Для городских дорог показывают красную линию. При реконструкции показывают существующую дорогу.
Графа 2 – «Тип местности по увлажнению». Указывается номер типа местности по признакам увлажнения верхних слоев грунта в соответствии с принятой классификацией (см. табл. 8.1).
Графа 3 – «Тип поперечного профиля земляного полотна». Указывается номер типа поперечного профиля конструкции земляного полотна в соответствии с чертежами поперечных профилей дороги. Заполняется после выбора конструкции земляного полотна.
Графы 4 и 5 – «Левый кювет, канава, резерв», «Правый кювет, канава, резерв» заполняют в процессе проектирования водоотвода.
Графа 6 – «Уклон и вертикальная кривая». В этой графе показывают элементы проектной линии: прямые и вертикальные кривые, а также привязки к пикетам точек изменения характера проектной линии: начало и конец вертикальных кривых, переломы проектной линии. Прямые показывают в виде отрезков с характерным уклоном, над которыми записывают уклон данного элемента проектной линии в ‰, а под отрезком – его длину в м. Для вертикальных

86
кривых записывают значения: радиуса, длины кривой, биссектрисы. Вертикальные кривые обозначаются условными знаками. Данная графа заполняется при проектировании продольного профиля дороги (нанесении проектной линии).
Рис. 8.1 Форма пояснительной сетки (таблицы) продольного профиля дороги
Графа 7 – «Отметка бровки земляного полотна». Указываются проектные отметки бровки земляного полотна, рассчитанные при нанесении проектной линии для всех характерных точек: пикеты, плюсовые точки, точки изменения характера проектной линии.
Графа 8 – «Отметка земли». Указываются фактические отметки естественной поверхности земли по оси дороги, которые определяют по горизонталям методами интерполяции или экстраполяции или по результатам геометрического нивелирования трассы. В проектах реконструкции дорог в этой графе показываются интерполированные отметки подошвы насыпи или бровки выемки
87
существующей дороги, в проектах реконструкции городских дорог – отметки по оси проезжей части существующей дороги.
88
89
90
Графа 9 – «Расстояние». Показываются расстояния между пикетами и плюсовыми точками, цифрами указывают расстояние от плюсовой точки до соседних пикетов или плюсовых точек. Отдельные участки продольного профиля с большим количеством плюсовых точек помещают в виде таблицы с указанием расстояний и отметок на том же листе, на котором изображен продольный профиль.
Графа 10 – «Пикет». Указываются номера пикетов. Пикетаж на продольном профиле дают с нумерацией между километрами от 0 до 9.
Графа 11 – «Прямая и кривая в плане». В этой графе изображают развернутый (условный) план трассы, показываются прямые вставки и кривые в условных знаках. Над прямой вставкой подписывают значение ее длины, а под ней – румб. Основные кривые правых поворотов показывают прямой горизонтальной линией, располагаемой на 5 мм выше прямых вставок, а основные кривые левых поворотов – на 5 мм ниже. Переходные кривые показывают наклонными линиями, соединяющими НК с началом основной кривой или конец основной кривой с КК. Для кривых в плане указывают величины: угол поворота, радиус круговой кривой, тангенс или тангенсы, длина кривой и длины переходных кривых, привязки НК и КК к пикетам.
Графа 12 – «Указатель километров». Показывают километровые знаки и подписывают номера километров.
Продольный профиль трассы в отметках земли показан на рис. 8.2.
Построение геологического разреза продольного профиля
Вычерчивание грунтового (геологического) разреза профиля начинается с нанесения линии, параллельной линии земли (ниже ее на 20 мм). В местах закладки разрезов наносят колонки грунтов с указанием глубины заложения в масштабе 1:50. Границы залегания одноименных грунтов на смежных колонках соединяют прямыми линиями и указывают на профиле наименование слоев грунта и номера их групп в соответствии с классификацией грунта по трудности разработки. На разведочных геологических колонках указывают также отметки грунтовых вод (УГВ) с датой их вскрытия.
Шурфы на профиле показывают колонками шириной 6 мм с указанием в соответствии с условными обозначениями влажности песчаных и крупнообломочных грунтов, а для глинистых грунтов – консистенции.
Скважины изображаются шириной 2 мм. Если глубина скважины не размещается в пределах грунтового разреза, ее показывают с разрывом. С правой стороны от изображения выработок указывают глубину каждого грунтовопочвенного горизонта от поверхности земли.
В графе «Развернутый план дороги» шурфы и скважины показывают квадратами соответственно со сторонами 6 мм и 2 мм, верхняя левая часть которых затушевывается от диагонали.
91
На рис. 8.3 представлены условные обозначения грунтов и горных пород для геологических разрезов продольных и поперечных профилей дорог.
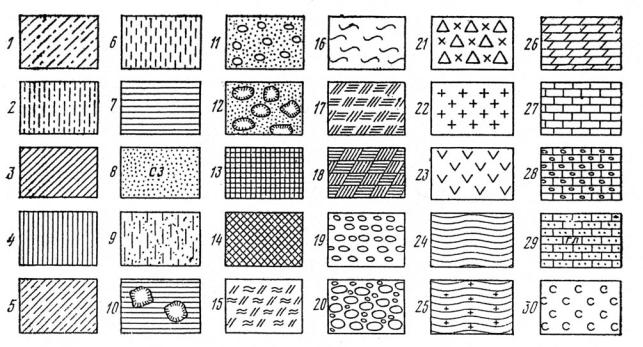
92
1 – супесь; 2 – супесь мелкая; 3 – суглинок; 4 – суглинок тяжелый; 5 – суглинок пылеватый; 6 – грунт пылеватый; 7 – глина; 8 – песок среднезернистый; 9 – песок пылеватый; 10 – глина валунная; 11 – песок гравелистый; 12 – каменный навал; 13 – торф; 14 – сапропель; 15 – мохорастительный покров; 16 – ил, иловатый грунт; 17 – насыпной грунт; 18 – строительный мусор; 19 – гравий; 20 – галька; 21 – дресва, хрящ; 22 – гранит; 23 – диабаз; 24 – сланец глинистый; 25 – сланец метаморфический; 26 – мергель; 27 – известняк; 28 – известняк ракушечник; 29 – песчаник (со значком «гл» – глинистый, «кв» – кварцевый и т.д.); 30 – засоленность грунта (показывается дополнительно)
Рис. 8.3 Условные обозначения грунтов и горных пород на геологических разрезах продольных и поперечных профилей дорог
Установление характера поверхностного стока. Размещение водопропускных сооружений
Для установления характера поверхностного стока необходимо на карте в зоне расположения запроектированной трассы стрелками указать направление стока воды. Поверхностные воды стекают вниз по рельефу, направление стока перпендикулярно горизонталям. Данные стрелки показывают, как направлены потоки, стекающих по рельефу поверхностных вод, относительно дороги. Эти стрелки переносят на «Развернутый план дороги» пояснительной сетки продольного профиля, сохраняя их ориентацию относительно дороги. Изображение характера поверхностного стока на «Развернутом плане дороги» позволяет установить, в каких местах вода притекает к земляному полотну, а в каких наоборот обеспечен естественный отток воды от земляного полотна, где сливаются встречные потоки вод, и требуется их пропуск через земляное полотно. Изучение поверхностного стока на участках местности, прилегающей к дороге не-
93
обходимо для рационального размещения водоотводных и водопропускных сооружений.
Искусственные сооружения (трубы и мосты) предназначены для пропуска воды через земляное полотно и устраиваются в местах понижения рельефа при пересечении трассой лощин (балок, оврагов), а также постоянных и временных водотоков (рек, ручьев, каналов). Место положения искусственного сооружения определяется по продольному профилю: переход поверхностных вод с одной стороны земляного полотна на другую необходимо обеспечить в местах, где линия земли изменяет спуск на подъем. Трубы устраиваются при расчетном расходе воды до 20 м3/с, в остальных случаях, а также на пересечениях постоянных водотоков применяются мосты.
Положение искусственных сооружений показывают на продольном профиле условными знаками и над проектной линией против условного знака записывают характеристику сооружения: для труб – количество очков, материал, размер отверстия, пикетажное положение; для мостов – материал, длина, пикетажное положение середины моста.
Порядок выполнения задания и исходные данные
1.На листе миллиметровой бумаги с размерами: высота 297 мм (420 мм), длина 900 мм вычертить стандартную рамку со штампом в правом нижнем углу.
2.Провести линию условного горизонта. Вычертить пояснительную сетку продольного профиля и заполнить ее шапку.
3.Заполнить графы пояснительной сетки: «Развернутый план дороги», «Тип местности по увлажнению», «Отметка земли», «Расстояние», «Пикет», «Прямая и кривая в плане», «Указатель километров». Профиль строиться протяженностью 30 пикетов (3 км). Закладка шурфов предусмотрена на каждом 5-ом пикете, начиная с нулевого.
4.Построить линию земли.
5.Построить грунтовый разрез на профиле. Показать уровень залегания грунтовых вод.
6.По карте установить направления поверхностного стока и указать направления стока поверхностных вод на «Развернутом плане дороги».
7.Определить места расположения искусственных сооружений. Назначить вид водопропускного сооружения для каждого места. Результаты представить в виде табл. 8.2. В графе «Конструктивные особенности» для труб указываются: количество очков, материал звеньев трубы, форма водопропускного отверстия и его размеры; для мостов: тип конструкции (балочный, арочный, висячий, рамный), материал пролетных строений, длина. Названные параметры устанавливают при проектировании искусственных сооружений, а их конструкции принимают на основе технико-экономического сравнения различных конструкций для данных условий. При выполнении настоящей работы конструктивные особенности искусственных сооружений принимаются условно, при этом следует принимать типовые конструкции: круглые трубы диаметром 1 м, 1,5 м, 2 м; балки пролетных строений мостов длиной 6 м, 9
94
м, 12 м, 15 м, 18 м, 21 м, 24 м. Длина моста LМ (м) с устоями в виде конусов, расположенного на горизонтальной площадке или на уклоне до 10 ‰ равна
n |
n+1 |
LМ = ∑lпрi |
+ ∑aj + 2bШ , lпрi – длина балки i -го пролета, м; n – количество |
i=1 |
j=1 |
пролетов; |
aj – зазор между пролетными строениями (м), равный 0,05…0,1 |
м; bШ – ширина шкафного блока, м. bШ ≥ mкон (K +0,5t )−0,5(q + a)+0,1, где mкон – коэффициент заложения откоса конуса, равный 1,5…2; K – конст-
руктивная высота моста (м), которая зависит от длины пролета, ориентиро-
вочно K =0,8…1,4 м; t |
– высота ригеля (м), равная 0,4…0,6 м; q – ширина |
|||
ригеля (м), равная 0,7…0,8 м; a = aj . |
|
|||
|
|
|
|
Таблица 8.2 |
|
Ведомость искусственных сооружений |
|||
Положение |
|
Вид |
Конструктивные особенности |
|
Пикет |
Плюс |
|
|
|
|
|
|
|
|
8.Оформить отчет. В выводах указать протяженность подъемов и спусков в каждом направлении (ПК 0 – ПК 30; ПК 30 – ПК 0), количество искусственных сооружений на участке.
95
ЗАДАНИЕ № 9
Построение проектной линии продольного профиля дороги. Вписывание вертикальных кривых
Проектирование продольного профиля дороги
Проектирование продольного профиля дороги заключается в построении и расчете проектной линии – проекции бровки земляного полотна на развертку вертикального разреза земляного полотна и его подошвы секущей поверхностью, проходящей по оси дороги перпендикулярно уровенной поверхности. Взаимное расположение проектной линии и линии земли определяет особенности конструкции земляного полотна дороги, если проектная линия проходит выше линии земли, то земляное полотно на этих участках выполняется в виде насыпи, а в противном случае – в виде выемки.
Проектная линия определяет такой важный фактор сопротивления движению (на подъемах) и торможению (на спусках), как продольный уклон дороги i , частота и интенсивность изменения продольного уклона дороги, определяемые величиной шага проектирования d0 (м) и разностью уклонов сопрягае-
мых элементов i (‰) проектной линии, обуславливают частоту изменения условий движения, а значит и режима движения, что определяет условия труда водителей. Параметры проектной линии определяют объемы производства земляных работ при строительстве дороги, а поэтому определяют стоимость строительства. Учитывая выше сказанное, для обеспечения удобного и безопасного движения и минимизации затрат на строительство, при нанесении проектной линии необходимо обеспечить: не превышение руководящего уклона iР ;
прохождение проектной линии с заданными отметками на контрольных (фиксированных) точках трассы; видимость дороги в продольном профиле и плавное изменение уклонов путем устройства вертикальных кривых; отвод воды от земляного полотна; небольшие объемы земляных работ и возможность их комплексной механизации.
К контрольным относятся отметки: проезжей части мостов и бровки земляного полотна над трубами; головок рельсов пересекаемых железных дорог; участков, проходящих под высоковольтными линиями. В местах пересечений существующих автомобильных дорог в одном уровне или примыканий в одном уровне проектная отметка должна быть такой же, как и проектная отметка существующей дороги, а участок проектной линии в зоне примыкания или пересечения должен иметь продольный уклон равный поперечному уклону проезжей части пересекаемой дороги или дороги, к которой примыкает проектируемая дорога. В местах устройства пересечений существующих автомобильных и железных дорог в разных уровнях или примыканий к автомобильным дорогам в
96
разных уровнях проектная отметка назначается равной проектной отметке существующей автомобильной дороги или отметке головок рельсов железной дороги увеличенной на необходимую проектную высоту путепровода, которая определяется в зависимости от необходимого подмостового габарита, высоты пролетных строений и толщины настила путепрвода.
Минимально допустимые отметки проезжей части мостов и бровки земляного полотна над трубами определяются при проектировании названных сооружений. Мосты и трубы устраиваются в местах изменения спуска линии земли на подъем, где трасса пересекает водотоки и тальвеги лощин (временные водотоки). В этих местах дорога должна проходить только в насыпи с рабочей отметкой не менее, чем минимально допустимая отметка проезжей части моста или бровки над трубой, желательно участок проектной линии в зоне расположения моста устраивать в виде горизонтальной площадки с продольным уклоном равным 0. Если типы и размеры мостов и труб выбираются без расчета, высота насыпи назначается в зависимости от величины пересекаемого водотока и типа сооружения (для малых мостов в пределах 2,0…3,5 м). Высота насыпи над высшей точкой трубы должна быть не менее 0,5 м при безнапорном 1 м при полунапорном и напорном режимах работы трубы.
Требования по назначению рабочей отметки в зоне пересечения подземных и наземных инженерных сетей выдаются организациями, осуществляющими эксплуатацию данных сетей. Проектные отметки на участках пересечения воздушных линий электропередач, телефонных и телеграфных линий назначаются в соответствии с требованиями СНиП 2.05.02-85* для дорог общего пользования и СНиП 2.05.07-91* для ведомственных дорог.
Различают два метода нанесения проектной линии: по обертывающей и по секущей. При проектировании по обертывающей проектная линия наносится по возможности параллельно поверхности земли с соблюдением руководящих рабочих отметок hР или руководящих проектных отметок HР, отступая от это-
го правила лишь на пониженных местах рельефа, при прохождении контрольных точек, при близком расположении друг от друга переломов уровня земли. Желательно, чтобы рабочие отметки не превышали руководящие более чем на 0,2 м. Обертывающее проектирование рекомендуется в условиях равнинного и слабохолмистого рельефа.
Руководящая рабочая отметка hР – возвышение бровки дороги над по-
верхностью земли, которая обеспечивает снегонезаносимость поверхности дороги в открытой местности при 1-ом типе местности по увлажнению и недоступность воды, поднимающейся по капиллярам в грунте земляного полотна, к основанию дорожной одежды при 2-ом и 3-ем типах местности по увлажнению (см. табл. 9.1). По условию снегонезаносимости возвышение бровки дороги hР
над поверхностью земли должно быть |
|
hР = hСП(5) + hВ , |
(9.1) |
97
где hСП(5) – высота снежного покрова с вероятностью превышения 5 % (при-
нимается в зависимости от района строительства дороги по метеорологическим справочникам), м;
hВ – нормируемая величина возвышения поверхности дороги (м) над
уровнем снегового покрова.
В районах, где расчетная высота снегового покрова hСП(5) превышает 1 м, необходимо проверять достаточность возвышения бровки насыпи hВ над сне-
говым покровом по условию беспрепятственного размещения снега, сбрасываемого с дороги при снегоочистке, используя формулу
h = |
0,375hСП(5) B |
, |
(9.2) |
|
|
||||
В |
a |
|
||
где B – ширина земляного полотна, м; |
|
|||
|
|
|
||
a – расстояние отбрасывания снега с дороги снегоочистителем (м), для до- |
||||
рог с регулярным режимом зимнего содержания допускается принимать |
||||
a = 8 м. |
|
|
|
|
Возвышение бровки дороги hР над поверхностью земли при необеспе- |
||||
ченном поверхностном стоке определяется по формуле |
|
|||
hР = hП −OКiК −OУiУ −OГiГ , |
(9.3) |
|||
где hП – необходимое возвышение поверхности покрытия над поверхностью
земли (м) при необеспеченном поверхностном стоке, принимаемое по табл. 9.1;
OК , iК , OУ , iУ , OГ , iГ – соответственно ширина (м) и поперечный уклон (до-
ли единицы) укрепительной (краевой), укрепленной и грунтовой полос обочины.
Таблица 9.1 Необходимое наименьшее возвышение поверхности дорожного
покрытия над уровнем грунтовых или длительно (более 30 сут.) стоящих поверхностных вод (числитель) и над поверхностью земли при необеспеченном поверхностном стоке или над уровнем кратковременно (менее 30 сут.) стоящих поверхностных вод (знаменатель)
Грунт рабоче- |
|
Дорожно-климатические зоны |
|
|||
го слоя земля- |
II |
III |
IV |
V |
||
ного полотна |
|
|
0,75 |
|
||
Песок мелкий, |
1,1 |
0,9 |
0,5 |
|||
супеси |
легкая |
0,9 |
0,7 |
0,55 |
0,3 |
|
и легкая круп- |
||||||
|
|
|
|
|||
ная |
|
|
|
1,1 |
|
|
Песок пылева- |
1,5 |
1,2 |
0,8 |
|||
тый, |
супесь |
1,2 |
1,0 |
0,8 |
0,5 |
|
пылеватая |
|
|
|
|
||
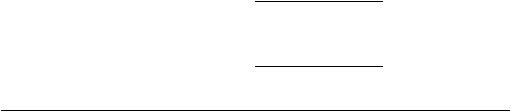
|
|
|
|
98 |
|
|
|
|
|
|
1,5 |
|
|
||
Суглинки лег- |
2,2 |
1,8 |
1,1 |
||||
кий |
и |
тяже- |
1,6 |
1,4 |
1,1 |
|
0,8 |
лый, глины |
|
|
|
|
|
||
|
|
|
|
|
|
Окончание табл. 9.1 |
|
Грунт рабоче- |
|
Дорожно-климатические зоны |
|||||
го слоя земля- |
II |
III |
IV |
|
V |
||
ного полотна |
|
|
|
|
|
||
Супесь |
тяже- |
|
|
|
|
|
|
лая пылеватая, |
2,4 |
2,1 |
1,8 |
|
1,2 |
||
суглинки |
лег- |
1,8 |
1,5 |
1,3 |
|
0,8 |
|
кий |
пылева- |
|
|
|
|
|
|
тый |
и |
тяже- |
|
|
|
|
|
лый |
пылева- |
|
|
|
|
|
|
тый |
|
|
|
|
|
|
|
Примечания: 1. За расчетный уровень грунтовых вод надлежит принимать максимально возможный осенний (перед промерзанием) уровень за период между капитальными ремонтами дорожной одежды. В районах, где наблюдаются частые продолжительные оттепели, за расчетный следует принимать максимально возможный весенний уровень грунтовых вод за период между капитальными ремонтами. В районах с глубиной промерзания менее толщины дорожной одежды за расчетный уровень следует принимать максимально возможный уровень грунтовых вод требуемой вероятности превышения в период его сезонного максимума. Положение расчетного уровня грунтовых вод следует устанавливать по данным разовых кратковременных замеров на период изысканий и прогнозов, составленных институтом ВСЕГИНГЕО. При отсутствии указанных данных, а так же при наличии верховодки за расчетный допускается принимать уровень, определяемый по верхней линии оглеения грунтов.
2.Возвышение поверхности покрытия дорожной одежды над уровнем подземных вод или уровнем поверхностных вод при слабо- и среднезасоленных грунтах следует увеличивать на 20 % (для суглинков и глин на 30 %), а при сильно засоленных грунтах – на
40…60 %.
3.В районах постоянного искусственного орошения возвышение поверхности покрытия над зимне-весенним уровнем грунтовых вод в IV и V дорожно-климатических зонах следует увеличивать на 0,4 м, а в III зоне – на 0,2 м.
Возвышение бровки дороги hР над уровнем грунтовых вод определяется по формуле
99
hР = hП − hГ −OКiК −OУiУ −OГiГ , |
(9.4) |
где hП – необходимое возвышение поверхности покрытия над уровнем грун-
товых вод (м), принимаемое по табл. 9.1;
hГ – расчетный уровень (глубина) залегания грунтовых вод, м. Проектная отметка HР на участках стояния поверхностных вод опреде-
ляется по формуле
HР = hП + HПВ −OКiК −OУiУ −OГiГ , |
(9.5) |
где hП – необходимое возвышение поверхности покрытия над уровнем по-
верхностных вод (м), принимаемое по табл. 9.1;
HПВ – расчетный уровень стояния поверхностных вод в принятой системе
высот, м.
В условиях сильно пересеченного рельефа местности более рационально наносить проектную линию по секущей, то есть чередующимися выемками и насыпями. Для уменьшения затрат при производстве земляных работ в этом случае смежные насыпи проектируются с расчетом равенства объемов земляных работ с выемками. При этом следует учитывать, что при равенстве на профиле площадей смежных насыпей и выемок, объем грунта выемки будет на 25…30 % больше, так как при равных значениях рабочих отметок поперечное сечение выемки получается большим, чем сечение насыпи. Следует избегать проектирования мелких выемок значительной протяженности, подвергаемых снегозаносимости. При нулевых отметках и малых насыпях длинные горизонтальные участки проектировать не рекомендуется. Проектную линию в выемках необходимо назначать с уклоном не менее 5 ‰.
Проектирование продольного профиля на косогорных участках должно вестись комплексно с одновременным проектированием поперечных профилей земляного полотна. Земляное полотно дороги лучше всего размещать в полувы- емке-полунасыпи с равенством площадей обеих частей при поперечном уклоне естественной поверхности земли (подошвы земляного полотна) 1:10…1:5 (100…200 ‰), а в случае автомагистралей, имеющих две проезжие части и раз-
делительную полосу – 1:25…1:5 (40…200 ‰).
При поперечном уклоне круче 1:5 (более 200 ‰) земляное полотно удобно проектировать в выемке по типу «выемка в полке».
Намечая положение проектной линии, следует избегать частых ее переломов, соответствующих микрорельефу местности. Особенно нежелательны участки с частой сменой подъемов и спусков (пилообразный продольный профиль). Вместе с тем не следует искусственно вводить длинные участки с постоянным уклоном, для устройства которых потребовалось бы выполнение излишних земляных работ. Минимальное расстояние между смежными переломами проектной линии (шаг проектирования d0 ) назначается в зависимости от радиу-
сов вертикальных кривых RВК .
100
d0 |
= |
iР (RВК/ |
+ RВК// |
) |
, |
(9.6) |
1000 |
|
|||||
|
|
|
|
|
||
где iР – руководящий уклон, ‰;
RВК/ , RВК// – соответственно радиусы выпуклой и вогнутой вертикальных
кривых, м.
Продольные уклоны на участках кривых малых радиусов ( R ≤50 м) не должны превышать величины iР −iэк , где iэк – эквивалентный уклон, прини-
маемый согласно СНиП 2.05.02.-85* (см. табл. 2.12) для дорог общего пользования и СНиП 2.05.07.-91* – для ведомственных дорог.
Нанесение проектной линии начинают с обозначения контрольных точек. Процесс накладки проектной линии начинают с предварительного нанесения ее на отдельном отрезке пути длиной d (м) ( d ≥ d0 ) с близкими по значению ук-
лонами составляющих этот отрезок участков линии земли. Высоту насыпи в начале и конце отрезка желательно назначить равной руководящей рабочей отметке с учетом изменения рабочей отметки после вписывания вертикальных кривых, если проектная линия наносится по обертывающей. Затем рассчитывают уклон i построенного участка проектной линии и округляют его до целых
‰
i =1000 Hd − H0 |
, |
(9.7) |
d |
|
|
где Hd , H0 – соответственно принятые проектные отметки в конце и начале
участка проектной линии длиной d , м. |
|
|
|
|||
С учетом полученного и округленного до целых ‰ уклона i |
рассчиты- |
|||||
вают проектные отметки Hпр для всех пикетов и плюсовых точек (кроме на- |
||||||
чальной) на проектируемом отрезке проектной линии |
|
|||||
Hпр = H0 ± |
|
|
si |
, |
(9.8) |
|
1000 |
||||||
|
|
|
||||
где s – расстояние от начала участка до рассматриваемой точки (0 ≤ s ≤ d ), м.
Вформуле (9.8) знак «+» применяется, если участок проектной линии является подъемом, а знак «–» – для спуска. Все линейные параметры продольного профиля рассчитываются с точностью до 0,01 м.
Впроцессе нанесения проектной линии заполняют две графы пояснительной сетки профиля: «Уклон и вертикальная кривая» и «Отметка бровки земляного полотна».
Рабочие отметки рассчитывают после определения проектных отметок и записывают над проектной линией, если они положительные и под проектной линией, если они отрицательные. Рабочая отметка в конкретной точке определяется как разность проектной отметки и отметки земли в данной точке. Если в процессе этой работы выясняется, что не обеспечено необходимое возвышение бровки земляного полотна при проектировании по обертывающей, то изменяют
101
положение проектной линии путем увеличения или уменьшения продольного уклона, или сокращают протяженность d отрезка проектной линии.
При пересечении проектной линией линии земли расстояние a (м) от точки пересечения до ближайшего пикета или плюсовой точки с рабочей отметкой ha (м) определяется по формуле
a = |
bha |
, |
(9.9) |
|
h |
−h |
|||
|
a |
b |
|
|
где b – расстояние от пикета или плюсовой точки, имеющей рабочую отметку ha до пикета или плюсовой точки расположенной после точки пересечения
проектной линии с линией земли и имеющей рабочую отметку hb , м.
Построенная по вышеизложенной методике проектная линия представляет собой ломаную линию, состоящую из отрезков длиной (горизонтальное проложение) d и уклоном i . Продольный профиль участка дороги с нанесенной проектной линией в виде ломаной показан на рис. 9.1.
Расчет и построение вертикальных кривых
Точки, в которых проектная линия изменяет уклон, называются переломами проектной линии. Переломы проектной линии бывают выпуклые и вогнутые, выпуклый перелом располагается выше линии соединяющей концы сопрягаемых в этом переломе отрезков проектной линии, а вогнутый ниже названной линии. Если сопрягаемые отрезки имеют соответственно уклоны i1 и i2 , то в
точке перелома происходит изменение продольного уклона дороги на величину i = i2 −i1 при условии, что уклоны направлены в одну сторону и на величину i =i2 +i1 при условии, что уклоны направлены в разные стороны. Переломы
проектной линии (места изменения продольного уклона дороги) негативно отражаются на условиях движения и могут приводить к аварийным ситуациям, выпуклые переломы ограничивают видимость поверхности дороги. Величина допустимой наибольшей разности сопрягаемых уклонов i (‰) при выпуклом переломе определяется по формуле
i = |
1000dВ , |
(9.10) |
|
SВ |
|
где dВ – высота глаз водителя над поверхностью дороги (м), принимается: для
легковых автомобилей 1,2 м; для грузовых автомобилей и автобусов – 1,8 м;
SВ – расчетное расстояние видимости поверхности дороги, м.
СНиП 2.05.02-85* рекомендует все переломы проектной линии продольного профиля сопрягать вертикальными кривыми с целью обеспечения удобства и безопасности движения. Не следует допускать длинные прямые вставки в продольном профиле. Предельные длины их приведены в табл. 9.2. Смежные
102
кривые в продольном профиле допускается проектировать примыкающими одна к другой без прямых вставок.
Вертикальная кривая или кривая в продольном профиле представляет собой дугу квадратной параболы, которая в декартовой системе координат XY задается функцией вида (рис. 9.2)
103
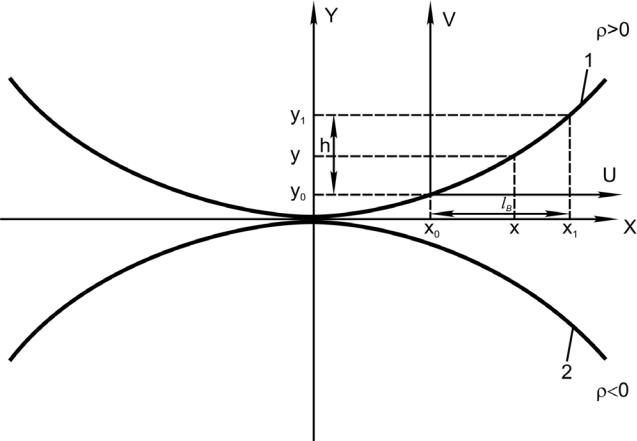
104
y = ± |
x2 |
, |
(9.11) |
|
2R |
||||
|
|
|
||
|
ВК |
|
|
где x, y – координаты точки параболы, м;
RВК – радиус параболы в ее вершине – радиус вертикальной кривой, м.
1 – вогнутая кривая; 2 – выпуклая кривая Рис. 9.2 Вертикальные кривые в декартовой системе координат
Производная от функции (9.11) – тангенс угла наклона касательной в любой точке параболы или продольный уклон пути i (доли единицы) в любой точке вертикальной кривой
i = ± |
x |
. |
(9.12) |
|
|||
|
R |
|
|
|
ВК |
|
|
В формулах (9.11) и (9.12) и последующих знак «+» для вогнутых кривых, а знак «–» – для выпуклых.
105
Из формулы (9.12) видно, что в пределах вертикальной кривой происходит плавное изменение продольного уклона от i1 до i2 по линейному закону.
Вертикальные кривые бывают двух видов: выпуклые (см. рис. 9.3а), которые устраиваются в выпуклых переломах проектной линии и вогнутые (см. рис. 9.3б), устраиваемые в вогнутых переломах проектной линии.
Вертикальные кривые можно разбивать разными способами: тангенсов, аналитическим, шаблонов. При способе тангенсов положение начала (НВК) и конца (КВК) вертикальной кривой определяется путем откладывания тангенсов T от точки перелома проектной линии (рис. 9.3). При замене перелома проектной линии вертикальной кривой проектная отметка точки перелома проектной линии увеличивается в случае вогнутых кривых на величину биссектрисы Б, а в случае выпуклых кривых уменьшается на ту же величину. Параметры вертикальной кривой: длина K , тангенс T и биссектриса Б определяются по формулам:
|
R |
i |
|
K |
|
K 2 |
|
|
K = |
ВК |
|
; T = |
|
; Б = |
|
. |
(9.13) |
1000 |
|
2 |
|
8R |
|
|
||
|
|
|
|
|
|
ВК |
|
|
Пикетажные положения НВК и КВК определяются по формулам: |
|
|||||||
НВК=ВУ–T ; КВК=НВК+ K =ВУ+T , |
(9.14) |
|||||||
где ВУ – пикетажное положение точки перелома проектной линии.
При вписывании вертикальных кривых длины элементов проектной линии уменьшаются на величину тангенса. Если элемент с начальной длиной d располагается между вертикальными кривыми с тангенсами T1 и T2 , то после
разбивки вертикальных кривых этот элемент будет иметь длину d1 = d −T1 −T2 .
Вертикальные кривые вычерчиваются при помощи лекал, а в графе «Уклон и вертикальная кривая» пояснительной сетки профиля показываются условными знаками. Условные обозначения для оформления продольных профилей автомобильных дорог представлены на рис. 9.4. Продольный профиль участка дороги с вписанными вертикальными кривыми показан на рис. 9.5 (параметры вертикальных кривых представлены в табл. 9.3).
Точки проектной линии, которые попадают на вертикальную кривую, будут иметь другие проектные отметки, так как в случае вогнутой кривой проектные отметки точек попадающих на кривую увеличиваются, а в случае выпуклой кривой – уменьшаются. Проектная отметка Hпр любой точки, лежащей на
вертикальной кривой и удаленной от НВК на расстояние s (м), может быть определена по формуле
H |
пр = H |
0 +0,5ρs |
2 |
Н |
|
− H |
|
(9.15) |
|
+ |
K |
K |
0 −0,5ρK s , |
||||
|
|
|
|
|
|
|
|
где H0 , НK – проектные отметки соответственно НВК и КВК, м; ρ – кривизна вертикальной кривой, м–1.
106 |
|
|
|
ρ = ± |
1 |
. |
(9.16) |
|
|||
|
R |
|
|
|
ВК |
|
|
Проектные отметки НВК и КВК могут быть определены в зависимости от проектных отметок ближайших точек и уклонов проектной линии в окрестностях этих точек по формуле (9.8).

107
а – выпуклая кривая; б – вогнутая кривая Рис. 9.3 Вертикальные кривые
108
Рис. 9.4 Условные обозначения для продольных профилей автомобильных дорог
На рис. 9.4 представлены следующие обозначения: 1 – репер № 7, отметка 537,211, расположен в 30 м вправо от ПК 17+65; 2 – автомобильные съезды и
109
переезды: а – съезд по типовому проекту II-а влево в 98 м от предыдущего пикета; б – переезд по типовому проекту I-а в 60 м от пикета; 3 – железнодорожные переезды: а – неохраняемый переезд на расстоянии 27 м от пикета; б – охраняемый переезд на расстоянии 83 м от пикета; цифры над флажками указывают категорию переезда; 4 – водоотвод: а – направление нагорной канавы и ее протяжение; б – сброс воды влево; с – сброс воды вправо; 5 – вертикальные кривые: а – выпуклая вертикальная кривая с восходящей и нисходящей ветвями; б – выпуклая кривая с нисходящей ветвью; в – вогнутая вертикальная кривая с нисходящей и восходящей ветвями, середина кривой расположена на пикете; г – вогнутая кривая с восходящей ветвью; д – переход в точке +10 м выпуклой кривой радиуса 6000 м в вогнутую кривую радиуса 3000 м на уклоне 30 ‰; середина кривой расположена в 25 м от пикета; 6 – пикетаж: а – промежуточная точка на ПК 6+65; б – рубленый пикет длиной 90 м с промежуточными точками на ПК 6+30 и ПК 6+50; 7 – километровые знаки: а – километровый знак проектируемой дороги; б – километровый знак на существующей дороге, подвергаемой реконструкции; 8 – кривые в плане: а – кривая № 5 с радиусом 500 м при угле поворота 26°24′; поперечный уклон виража 40 ‰, длина переходной кривой – 40 м, начало и конец кривой расположены соответственно на плюсовых точках +13 и +10 м; б – кривая при угле поворота влево менее 5°; 9 – местоположение искусственных сооружений: а – проектируемый железобетонный мост длиной 16 м; б – существующий железобетонный мост длиной 20 м; 10 – мосты: а – деревянный мост или путепровод; б – капитальный мост или путепровод с балочным пролетным строением; в – мост с фермой с ездой понизу; г – путепровод над проектируемой дорогой; д – путепровод под проектируемой дорогой; 11 – трубы и другие искусственные сооружения: а – овоидальная труба капитального типа; б – круглая труба капитального типа; в – прямоугольная труба капитального типа; г – деревянная прямоугольная труба; д – фильтрующая насыпь; е – лоток; 12 – подпорные стены: а – верховая подпорная стена; б – низовая подпорная стена; в – верховая одевающая стена; г – низовая одевающая стена; 13 – шурфы и буровые скважины: а – шурф № 57 глубиной 1,85 м в суглинистом грунте, грунтовые воды по наблюдениям 21 мая 1977 г. на глубине 1,10 м (ширина колонки на профиле 6 мм); б – шурф в пылеватом суглинке, углубленный буровой скважиной до 4,00 м; граница оглеения на глубине 0,60 м; в – скважина глубиной 8,10 м (ширина колонки на профиле 2 мм); г – то же, скважина при обозначении консистенции грунтов; 14 – обозначение консистенции связных грунтов и влажности несвязных грунтов в буровых скважинах на инженерно-геологических паспортах мостовых переходов: а – слабовлажные песчаные грунты и твердые связные грунты; б – слабовлажные песчаные грунты и тугопластичные связные грунты; в – очень влажные песчаные грунты и мягкопластичные связные грунты; г – водонасыщенные песчаные грунты и текучие связные грунты.
110
111
112
Введенный в формуле (9.15) параметр – кривизна ρ позволяет количественно идентифицировать качественное состояние элемента проектной линии. Если ρ >0, то вертикальная кривая вогнутая, а если ρ <0 , то вертикальная кривая выпуклая. Для прямой вставки проектной линии ρ =0, а следовательно
формула (9.15) будет иметь вид |
Hпр |
= H0 + |
НK − H0 |
s . Длина прямой вставки |
|
|
|
K |
|
проектной линии обозначена буквой d , а поэтому параметр K надо заменить
на d , а отношение |
НK − H0 |
– уклон прямой вставки (доли единицы), то есть |
|||||
|
i |
|
НK − H0 |
|
d |
|
|
|
= |
. С учетом изложенного формула (9.15) преобразуется в выра- |
|||||
1000 |
|||||||
|
d |
|
|
|
|||
жение (9.8), а следовательно зависимость (9.8) является частным случаем формулы (9.15) при ρ =0.
Порядок выполнения задания и исходные данные
1.Обосновать величину рекомендуемой рабочей отметки, при этом учесть, что на участках с высоким стоянием грунтовых вод и длительным стоянием поверхностных вод (речные поймы, болота) тип местности по характеру увлажнения – 3, на всех остальных участках принять тип местности – 2, если грунты по трассе представлены песками (мелким, средней крупности и крупным), крупнообломочными грунтами, супесью легкой крупной, то следует принять тип местности по характеру увлажнения –1. При первом типе местности рекомендуемую рабочую отметку насыпи целесообразно принять 1 м для дорог IV категории, 1,5 м для – II, III категорий без обоснования по снегонезаносимости. Рабочие отметки контрольных точек принять: НТ (ПК 0) – 1 м; при пересечении реки не менее 12 м для дорог II, III категорий и не менее 10 м для дорог IV категории; при пересечении ручья не менее 10 м для дорог II, III категорий и не менее 8 м для дорог IV категории. Геологические условия принять по табл. 9.4.
2.По значениям радиусов вертикальных кривых, принятым в задании № 2 вычислить шаг проектирования.
3.Построить проектную линию в виде ломаной, состоящей из отрезков длиной не менее принятого шага проектирования и с уклонами, которые не превышают величины наибольшего продольного (руководящего) уклона. От НТ (ПК 0) участок проектной линии на протяжении не менее 300 м для дорог II и III категорий и не менее 200 м для дорог IV категории принять с уклоном 20 ‰. При построении проектной линии заполнить графы пояснительной сетки «Уклон и вертикальная кривая», «Отметка бровки земляного полотна».
4.Обосновать радиусы вертикальных кривых для конкретных переломов, принятые значения радиусов должны быть не менее обоснованных в задании № 2. Прямые вставки в продольном профиле принять в соответствии с табл. 9.2, если это расстояние нельзя выдержать, то вертикальные кривые следует сопрягать без устройства прямой вставки между ними.
113
114
115
116
117
118
119
5.Вписать вертикальные кривые в переломы проектной линии. Показать вертикальные кривые в графе «Уклон и вертикальная кривая». Откорректировать длины прямых вставок проектной линии и графу «Уклон и вертикальная кривая». Положение НВК и КВК указывается в графе «Расстояние» как плюсовых точек. В графе «Отметка земли» указывают отметки земли НВК и КВК в скобках, которые устанавливают интерполяцией от отметок рядом расположенных пикетов. Заполнить табл. 9.3 для запроектированного профиля.
6.Откорректировать проектные и рабочие отметки в пределах вертикальных кривых.
7.Оформить продольный профиль участка дороги (см. рис. 9.5).
8.Оформить отчет. В выводах дать характеристику запроектированного продольного профиля участка дороги.
120
ЗАДАНИЕ № 10
Оценка пропускной способности дороги. Расчет итоговых коэффициентов аварийности
Особенности движения транспортных средств в потоке
При движении по дорогам транспортные средства образуют на них транспортные потоки, движущиеся навстречу друг другу. В каждом потоке между транспортными средствами устанавливаются интервалы, размер которых зависит от скорости движения и индивидуальных особенностей водителей, выдерживающих от идущего впереди автомобиля такое расстояние, которое им кажется безопасным. Изменение дорожных условий, отражающихся на скорости, вызывает соответствующее изменение расстояний между транспортными средствами (уплотнение или растягивание транспортного потока). Различие в условиях движения, которые кажутся разным водителям оптимальными, приводит к возникновению в каждом транспортном потоке внутренних помех. Происходят обгоны медленных автомобилей более быстрыми. Обгоны связаны с выездом обгоняющих автомобилей на смежные полосы встречного движения, что создает помехи для встречных автомобилей.
Условия движения по дороге существенно изменяются с увеличением интенсивности, приходящейся на полосу движения. В зависимости от насыщенности дорог транспортными средствами различают несколько характерных режимов транспортных потоков:
1.Свободный поток. Одиночные транспортные средства движутся по дороге на таком расстоянии друг за другом, что они практически не оказывают взаимного влияния на условия движения. Проезд по дороге неутомителен для водителей, каждый из которых может избрать оптимальную для себя скорость. Из этого случая исходят при обосновании требований к отдельным элементам дорог.
2.Частично связанный поток. Движение происходит в виде временно создающихся групп из нескольких транспортных средств, отличающихся по динамическим качествам и следующих какое-то время на близком расстоянии друг за другом. Обычно это вызывается тем, что впереди идущее транспортное средство, двигающееся с малой скоростью, задерживает задние. Водители их вынуждены ехать медленнее, чем хотелось бы, ожидая удобного момента для совершения обгона с выездом на соседнюю полосу, после чего получают возможность продолжить движение с режимом одиночного автомобиля. Если движение на одинаковом расстоянии, близком друг от друга, с одинаковыми скоростями предписано группе водителей, едущих в одно место, то это случай организованного колонного движения.
3.Связанный поток. Все транспортные средства оказывают взаимное влияние. Сразу после обгона скорость обогнавшего транспортного средства начинает вновь определяться движением едущего перед ним транспортного средства.
121
Движение происходит в виде больших групп автомобилей. Обгон осуществляется с тем большей трудностью, чем выше интенсивность движения.
4.Плотный, или насыщенный, поток. Транспортные средства следуют друг за другом, обгоны становятся практически невозможными. В местах резкого ухудшения дорожных условий возможны заторы.
По мере усложнения условий движения при росте интенсивности средние
скорости транспортного потока Vср (км/ч) снижаются, подчиняясь для дорог с
двумя полосами движения при смешанном составе транспортного потока эмпирической зависимости
Vср =V0 −αN , |
(10.1) |
где V0 – скорость одиночного автомобиля при отсутствии помех, зависящая от
дорожных условий, км/ч; α – коэффициент снижения скорости, который зависит от состава движения;
N – часовая суммарная интенсивность движения в обоих направлениях, прив. ед./ч.
По данным В.В. Сильянова, для дорожных условий РФ α = 0,016 при 20 %; 0,012 при 50 % и 0,008 при 80 % легковых автомобилей в составе транспортного потока. Для полностью однородного потока легковых автомобилей
α = 0,005.
Движение по дороге потока транспортных средств представляет собой своеобразный неустановившийся процесс, в котором взаимное расположение и скорости транспортных средств все время меняются. Поэтому режим движения потока может быть охарактеризован только средними статистическими показателями.
Важной характеристикой является также плотность транспортного потока
– количество автомобилей, приходящееся при данной средней скорости на единицу длины однородного по транспортным качествам участка дороги обычно протяжением 1 км
ρ = |
1 |
= |
|
N |
, |
(10.2) |
|
S |
V |
||||||
|
|
|
|
||||
|
|
|
|
ср |
|
|
|
где S – длина участка на дороге, приходящаяся на одно транспортное средство, км;
N – интенсивность движения по одной полосе, авт./ч.
Сложность процессов, протекающих в движущемся потоке транспортных средств, и влияние на скорость каждого из них большого числа факторов не позволяют описать режимы движения потока точными математическими зависимостями. Поэтому высказанные в разное время гипотезы теории движения транспортных потоков исходят из рассмотрения упрощенных, часто умозрительных и не подтвержденных наблюдениями моделей. Их можно разделить на две основные группы:
1. Теории, основанные на динамических моделях потока транспортных средств.
122
Они исследуют расстояния при различных скоростях между транспортными средствами, движущимися друг за другом без обгона по одной полосе проезжей части, и распространяют установленные закономерности на весь транспортный поток. Эта схема лучше всего соответствует высоким интенсивностям движения, когда обгоны практически невозможны или сопряжены с весьма большим риском.
2.Теории, основанные на вероятностных моделях. Они анализируют движение двух встречных потоков автомобилей в целом, учитывая возможность обгонов с заездом на полосу встречного движения при наличии во встречном потоке достаточного интервала между транспортными средствами.
Из динамических моделей при обосновании требований к дорогам имеет практическое значение «упрощенная динамическая модель», которая предполагает, что движение всех транспортных средств происходит с равными скоростями и на одинаковом расстоянии друг от друга, зависящем от длины тормозного пути. Несколько более совершенна динамическая теория «следования за лидером». Она предполагает, что в пределах транспортною потока расстояния между транспортными средствами не являются постоянными и все время меняются. В каждой паре транспортных средств заднее движется с ускорением, пропорциональным разности скоростей переднего и заднего транспортных средств. Так как заднее транспортное средство, в свою очередь, является передним для следующего за ним, его ускорение или притормаживание отражается на следующем транспортном средстве, и в транспортном потоке все время возникают своеобразные волны сгущения и разуплотнения.
Возможность проведения аналогии между движением транспортного потока и течением по руслу вязкой жидкости привела к появлению «гидродинамической модели», позволяющей исследовать скорость сжатия и растягивания транспортных потоков при возникновении и последующем удалении препятствия на пути транспортного потока, движущегося с постоянной скоростью.
Для расчетов, связанных с организацией движения, наиболее широкое распространение, очевидно, получат вероятностные модели, учитывающие возможность обгона, поскольку они точнее учитывают реальные условия движения по дороге. Однако разработаны они пока еще в меньшей степени, чем динамические теории. Вероятностные модели рассматривают скорость каждого транспортного средства в потоке, выдерживаемый интервал и выходы на обгон как случайные события, возникновение каждого из которых в малой степени связано с предшествующими. Основной областью применения вероятностных моделей являются задачи, в которых решаются вопросы взаимодействия потоков транспортных средств средней интенсивности, движущихся по различным полосам, например по пересечениям в одном уровне, участкам слияния и переплетения, в условиях, когда еще возможны обгоны.
Пропускная способность дороги и уровни удобства движения
Пропускной способностью дороги называют количество транспортных средств, которое может пройти по ней за определенный период времени. Про-
123
пускная способность не является однозначным параметром, характеризующим дорогу, так как может меняться в широких пределах в зависимости от скорости движения, степени его организованности и от состояния дорожного покрытия.
Под практической типичной пропускной способностью (термин, введенный Н.Ф. Хорошиловым) подразумевают наибольшее число транспортных средств, которое пропускает дорога при фактически складывающихся на ней режимах движения транспортных потоков. Оно зависит от соотношения в потоке между грузовыми и легковыми автомобилями, квалификации и дисциплины водителей, элементов плана, продольного профиля дороги и погодных условий.
В нормах и справочниках пропускная способность обычно приводится для средних дорожных условий применительно к смешанному, частично связанному транспортному потоку при благоприятных погодных условиях в характерных условиях рельефа. Ее выражают в единицах, приведенных к легковому автомобилю.
Для сравнительной оценки возможностей дороги используют максимальную теоретическую пропускную способность, определяемую расчетом по формулам динамической теории движения транспортных потоков для идеализированного колонного движения однотипных транспортных средств в благоприятных дорожных условиях, на прямом горизонтальном участке с сухим шероховатым покрытием.
Если интенсивность движения по дороге меньше пропускной способности, средняя скорость автомобилей возрастает, интервал между автомобилями соответственно увеличивается или группы автомобилей следуют с разрывами. Если интенсивность возрастает по сравнению с пропускной способностью, то условия движения значительно ухудшаются. Движение транспортного потока начинает происходить с меньшими интервалами между транспортными средствами, с уменьшенными расстояниями запаса или вовсе без них, с риском наездов на впереди идущие транспортные средства, а следовательно, и с повышенной напряженностью работы водителей.
Типичная пропускная способность полосы движения характеризует максимальную интенсивность при устойчивом движении транспортного потока, но с заметным снижением скорости по сравнению с одиночными транспортными средствами. В зависимости от интенсивности движения изменяются режимы движения транспортных средств. Чем меньшая интенсивность по одной полосе проезжей части предусмотрена при проектировании дороги, тем выше будет по ней скорость и тем большие удобства будут обеспечены для пользующихся дорогой, а поэтому типичная пропускная способность не должна достигаться в пределах принятого перспективного периода эксплуатации дороги. При проектировании дороги всегда должен быть предусмотрен резерв пропускной способности на случай внеплановых интенсивных перевозок, а также для обеспечения удобства и безопасности перевозок в часы сезонных и суточных пиков интенсивности.
124
Так как понятие о складывающихся на дорогах режимах движения несколько условно, в практику проектирования дорог и организации движения введено понятие об обеспечиваемых дорогами уровнях эксплуатации автомобильного транспорта. При этом в основу классификации могут быть положены разные критерии в зависимости от того, какому качеству дороги придается главное значение. В США, где впервые возникла идея такого подхода, на первое место была поставлена скорость сообщений на личных автомобилях. Условия движения классифицировались по уровням обслуживания.
В бывшем СССР вначале придавали решающее значение степени использования пропускной способности дороги и пользовались критерием – уровень загрузки (коэффициент загрузки дороги движением) KЗ (%)
KЗ |
=100 |
N |
, |
(10.3) |
|
||||
|
|
PТ |
|
|
где N – интенсивность движения на дороге, прив. ед./ч;
PТ – практическая типичная пропускная способность дороги, прив. ед./ч.
В настоящее время, учитывая значительный объем грузовых и пассажирских перевозок автомобильным транспортом и роль дорог как места активного отдыха при туристских поездках на личных автомобилях, на первое место ставят удобства работы для водителей, используя понятие об уровнях удобства движения (табл. 10.1).
Оценка пропускной способности автомобильной дороги
Рассмотрим взаимодействие двух транспортных средств следующих одно за другим. После того, как водитель впереди идущего транспортного средства по какой то причине начинает торможение, следующее за ним транспортное средство за время подготовки к торможению tпод , принимаемое при расчетах 2
с, проходит путь L1 равный
L = |
vtпод |
, |
(10.4) |
|
|||
1 |
3,6 |
|
|
|
|
|
где v – скорость движения заднего транспортного средства (км/ч), которую можно принять равной средней скорости движения потока;
tпод – время подготовки к торможению (с), принимаемое 2 с;
Вследствие возможного различия в состоянии тормозов транспортных средств тормозной путь впереди идущего средства может оказаться меньшим, и тогда заднее дополнительно приблизится к впереди идущему на расстояние L2
L |
= S |
|
− S |
|
= |
0,04v2 (K |
Э2 |
− K |
Э1 |
) |
, |
(10.5) |
|
тор2 |
тор1 |
g ( |
f + kторλ −i) |
|
|||||||||
2 |
|
|
|
|
|
|
|||||||
где Sтор1 , Sтор2 – соответственно тормозной путь, проходимый впереди иду-
щим транспортным средством и следующим за ним (задним) транспортным средством, м;
125
126
KЭ1 , KЭ2 – соответственно коэффициенты эффективности торможения
впереди идущего транспортного средства и следующего за ним (заднего) транспортного средства;
g – ускорение свободного падения, м/с2; f – коэффициент сопротивления качению;
kтор – коэффициент, учитывающий часть массы транспортного средства, приходящейся на тормозящиеся оси;
λ– коэффициент тормозной силы;
i– продольный уклон дороги.
Для безопасности движения должен быть обеспечен также некоторый запас расстояния между транспортными средствами после их остановок L3 = SР .
Таким образом, безопасное |
расстояние |
между |
транспортными |
средствами |
|||||||||
L = L1 + L2 + L3 , а длина участка дороги S |
(км), занимаемая одним транспорт- |
||||||||||||
ным средством составит |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−3 |
|
|
|
|
0,04v |
2 |
(KЭ2 |
− KЭ1 ) |
|
|
|
|
S =10 |
vt |
|
|
|
+ SР |
|
|
|
|||||
|
|
|
под + |
|
|
|
|
+ LТС |
, |
(10.6) |
|||
|
|
g (f |
+ kторλ −i) |
||||||||||
|
|
|
3,6 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где LТС – длина транспортного средства, м.
Количество транспортных средств, прошедших через рассматриваемое сечение дороги в одном направлении за час P (прив. ед./ч), то есть пропускная способность полосы движения при скорости v (км/ч), составит
P = |
v |
. |
(10.7) |
|
|||
|
S |
|
|
В целях лучшего учета условий движения различные авторы делают разные допущения о режиме торможения и о состоянии тормозов впереди идущего и заднего транспортных средств. Наиболее распространено предположение о необходимости мгновенной остановки впереди идущего транспортного средства ( KЭ1 = 0 ), что может проявиться как падение с грузового транспортного
средства какого-либо предмета, наезд на который представляет опасность для заднего транспортного средства. В этом случае
|
−3 |
|
|
|
0,04K |
|
v |
2 |
|
|
|
S =10 |
vt |
|
Э2 |
|
+ SР |
|
|
||||
|
|
|
под + |
|
|
|
+ LТС . |
(10.8) |
|||
|
|
g (f + kторλ −i) |
|||||||||
|
|
|
3,6 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Другое допущение исходит из предпосылки об одинаковом состоянии тормозных систем и режиме торможения впереди идущего и заднего транспортных средств ( KЭ2 = KЭ1 ), тогда
S =10 |
−3 |
vt |
под + SР |
|
(10.9) |
|
|
|
|
+ LТС . |
|||
|
|
|
3,6 |
|
|
|
В практических целях более правильно использовать зависимости (10.6) и (10.8), причем зависимость (10.8) обуславливает назначение более жестких
127
норм проектирования дорог и способствует повышению безопасности движения на стадии проектирования.
Для оценки практической типичной пропускной способности применяют метод, основанный на использовании опытных коэффициентов, отражающих влияние ухудшения условий на изменение пропускной способности по сравнению с горизонтальным прямым участком. Поправочные коэффициенты были установлены доктором технических наук В.В. Сильяновым по данным наблюдений за скоростями движения транспортных потоков на дорогах.
Пропускная способность полосы движения какого-либо участка дороги PТ оценивается в приведенном количестве легковых автомобилей
13 |
|
PТ = P∏βi , |
(10.10) |
i=1
где P – максимальная теоретическая пропускная способность, прив. ед./ч;
βi – частные коэффициенты снижения пропускной способности за счет влияния неблагоприятных условий, приведенные в табл. 10.2 – 10.13.
Таблица 10.2 Значения частного коэффициента снижения пропускной способности β1
|
Ширина полосы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
движения, м |
|
|
3,75 |
|
|
|
3,5 |
|
|
|
3,0 |
|||||
|
β1 |
|
|
1,0 |
|
|
|
0,97 |
|
|
|
0,85 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.3 |
||
|
Значения частного коэффициента снижения пропускной способности β2 |
||||||||||||||||
|
Расстояние от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кромки проезжей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
части до |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
препятствия на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обочине, м |
|
2,5 |
|
2,0 |
|
1,5 |
|
|
1,0 |
|
0,5 |
|
|
0 |
||
|
β2 |
|
1,0 |
|
0,99 |
|
0,95 |
|
|
0,9 |
|
0,83 |
|
|
0,78 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.4 |
||
|
Значения частного коэффициента снижения пропускной способности β3 |
||||||||||||||||
|
Количество автопоездов в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
составе транспортного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
потока, % |
|
|
1 |
|
10 |
|
|
|
20 |
|
|
30 |
||||
|
β3 |
|
|
0,98 |
|
0,93 |
|
|
0,87 |
|
|
0,81 |
|||||
|
при 20 % легких и средних |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
грузовых автомобилей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

128
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.5 |
|
Значения частного коэффициента снижения пропускной способности β4 |
|||||||||||||
Продольный уклон, |
|
20 |
|
30 |
|
40 |
|
50 |
|
|
60 |
||
‰ |
|
|
|
|
|
|
|
|
|
|
|
|
|
β4 |
|
0,92 |
|
0,91 |
|
0,83 |
|
0,75 |
|
0,64 |
|||
при длине подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
до 500 м и 10 % авто- |
|
|
|
|
|
|
|
|
|
|
|
|
|
поездов в составе |
|
|
|
|
|
|
|
|
|
|
|
|
|
транспортного потока |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.6 |
|
Значения частного коэффициента снижения пропускной способности β5 |
|||||||||||||
Расстояние видимости, м |
50 |
|
50…100 |
|
150…250 |
250…300 |
|||||||
β5 |
0,68 |
|
0,73 |
|
|
0,9 |
|
0,98 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.7 |
|
Значения частного коэффициента снижения пропускной способности β6 |
|||||||||||||
Радиус кривой в плане, м |
|
Более 600 |
450…200 |
|
Менее 100 |
||||||||
β6 |
|
|
1,0 |
|
|
|
0,96 |
|
0,85 |
||||
Таблица 10.8 Значения частных коэффициентов снижения пропускной способности β7 и β13
Скорость, |
ограни- |
|
|
|
|
|
|
|
|
|
|
|
|
|
чиваемая |
знаками, |
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
в населенных |
|
|
|
|
|
|
|
|
|
|
|
|
|
пунктах, км/ч |
|
60 |
|
50 |
|
30 |
|
|
20 |
|
10 |
|||
|
β7 и β13 |
|
1,0 |
0,98 |
|
0,88 |
|
0,76 |
|
0,44 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.9 |
||
|
Значения частного коэффициента снижения пропускной способности β8 |
|||||||||||||
Доля автомобилей, пово- |
|
|
|
|
|
|
|
|
|
|
||||
рачивающих налево |
(%) |
|
|
|
|
|
|
|
|
|
|
|||
на |
пересечении в одном |
|
|
|
|
|
|
|
|
|
|
|||
уровне при ширине про- |
|
|
|
|
|
|
|
|
|
|
||||
езжей части 7 м |
|
|
0 |
|
20 |
40 |
|
60 |
|
80 |
||||
β8 на пересечениях: |
|
|
0,94 |
|
0,82 |
0,7 |
|
0,57 |
|
|
0,47 |
|||
необорудованных |
|
|
|
|
|
|||||||||
с островками |
|
|
0,98 |
|
0,96 |
0,91 |
0,84 |
|
0,84 |
|||||
с островками и переходно- |
|
1,0 |
|
1,0 |
1,0 |
|
1,0 |
|
|
0,95 |
||||
скоростными полосами |
|
|
|
|
||||||||||
129
|
|
|
Таблица 10.10 |
Значения частного коэффициента снижения пропускной способности β9 |
|||
Тип обочин |
Укрепленные |
С дерновым |
Грунтовые |
|
щебнем |
покровом |
|
β9 |
0,99 |
0,95 |
0,9 |
Таблица 10.11 Значения частного коэффициента снижения пропускной способности β10
Тип покрытия |
С шерохова- |
Гладкие |
Булыжная |
|
той поверх- |
асфальтобе- |
мостовая |
|
ностной |
тонное или |
|
|
обработкой |
цементобе- |
|
|
|
тонное |
|
β10 |
1,0 |
0,87 |
0,72 |
Таблица 10.12 Значения частного коэффициента снижения пропускной способности β11
Участки около автобусных |
В стороне от дороги |
На уширении |
остановок и площадок отдыха |
|
проезжей части |
β11 |
1,0 |
0,64 |
Таблица 10.13 Значения частного коэффициента снижения пропускной способности β12
Наличие разметки |
Осевая |
Дополнительная |
|
|
полоса на подъемы |
β12 |
1,02 |
1,3…1,5 |
Для оценки пропускной способности дороги и выявления участков, на которых в первую очередь возможно возникновение заторов, строят линейные графики пропускной способности. Анализ этих графиков дает возможность разработать комплекс мероприятий по повышению пропускной способности на отдельных участках, ограничивающих пропускную способность – устройство дополнительной полосы проезжей части на подъемах путем уширения земляного полотна и уширения покрытия, нанесение на покрытии разметки, установка знаков рекомендуемой скорости движения и т.п.
Анализ зависимости частных коэффициентов βi от дорожных условий показывает, что коэффициенты β1, β2 , β3 , β5 , β9 , β10 являются постоянными для
дороги, на всем протяжении которой принята одинаковая расчетная скорость движения и установлена одна категория. Если обозначить β0 = β1β2β3β5β9β10 , то
формула (10.10) примет вид
130
PТ = Pβ0β4β6β7 β8β11β12β13 . |
(10.11) |
Установление числа полос движения на дороге
СНиП 2.05.02-85* предусматривает на дорогах общего пользования II, III, IV категорий две полосы движения, допуская использование для обгонов полосы встречного движения.
При назначении числа полос движения, а также для выявления мест устройства дополнительных полос (на подъемах, подходах к пересечениям) количество полос движения в одном направлении можно рассчитать по формуле
n = |
N |
, |
(10.12) |
|
2P z |
||||
|
|
|
||
|
Т |
|
|
где N – расчетная часовая интенсивность движения в последний год перспективного периода, прив. ед./ч;
PТ – практическая типичная пропускная способность полосы движения,
прив. ед./ч;
z – коэффициент использования пропускной способности.
Расчетная загрузка дорог движением, количественно характеризуемая коэффициентом использования пропускной способности, в момент их передачи в эксплуатацию не должна превышать 40…50 % от практической пропускной способности ( z = 0,4…0,5), чтобы к моменту окончания перспективного 20летнего срока эксплуатации и возникновения потребности в реконструкции используемая часть пропускной способности не превышала 65…75 %. Это соответствует полному использованию пропускной способности в часы пик. В отдельных случаях, когда первостепенное значение имеют быстрота и надежность автомобильных сообщений, например, на подъездах к крупным международным аэропортам, исходят из меньшей используемой доли пропускной способности.
Расчет итоговых коэффициентов аварийности
Степень обеспечения безопасности движения определяется не только соблюдением требований к размерам отдельных геометрических элементов дороги, но и взаимным их сочетанием. При сравнении вариантов трассы и организации движения по существующим дорогам используют метод коэффициентов аварийности, основанный на обобщении материалов статистики дорожнотранспортных происшествий. Он позволяет без обследований выяснить опасные места на основе проектных документов.
Степень опасности участков дороги характеризуют итоговым коэффициентом аварийности Kит , вычисленным как произведение частных коэффициен-
тов Ki , учитывающих влияние отдельных элементов плана и профиля дороги
14 |
|
Kит =∏Ki . |
(10.13) |
i=1
131
Коэффициенты Ki представляют собой отношение количества дорожно-
транспортных происшествий при том или ином значении элемента плана или профиля дороги к количеству происшествий на эталонном прямом горизонтальном участке дороги с проезжей частью шириной 7,5 м и с твердыми широкими обочинами. Значения частных коэффициентов аварийности Ki приведены
в табл. 10.14 – 10.27.
Таблица 10.14
Значение частного коэффициента аварийности K1
Интенсивность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
движения, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прив. ед./сут. |
|
500 |
|
|
|
1000 |
|
|
3000 |
5000 |
|
|
7000 |
|
9000 |
|||||||||
K1 |
|
0,4 |
|
|
|
0,5 |
|
|
0,75 |
1,0 |
|
|
1,4 |
|
|
1,7 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.15 |
||||
Значение частного коэффициента аварийности K2 |
|
|
||||||||||||||||||||||
Ширина проезжей |
|
|
4,5 |
|
|
5,5 |
|
6,0 |
|
|
7,5 |
|
|
8,5 |
||||||||||
части, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Значения K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
при обочинах: |
|
|
2,2 |
|
|
1,5 |
|
1,35 |
|
|
1,0 |
|
|
0,8 |
||||||||||
укрепленных |
|
|
|
|
|
|
|
|
|
|||||||||||||||
неукрепленных |
|
|
4,0 |
|
|
2,75 |
|
2,5 |
|
|
1,5 |
|
|
1,0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.16 |
||||
Значение частного коэффициента аварийности K3 |
|
|
||||||||||||||||||||||
Ширина обочины, м |
|
|
|
0,5 |
|
|
1,5 |
|
|
|
|
2,0 |
|
|
3,0 |
|||||||||
K3 |
|
|
|
|
|
2,2 |
|
|
|
1,4 |
|
|
|
|
1,2 |
|
|
1,0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.17 |
||||
Значение частного коэффициента аварийности K4 |
|
|
||||||||||||||||||||||
Продольный уклон, ‰ |
|
20 |
|
|
30 |
|
50 |
|
|
70 |
|
|
80 |
|||||||||||
Значения K4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
для дорог: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
без разделительной |
|
1,0 |
|
|
1,25 |
|
2,5 |
|
|
2,8 |
|
|
3,0 |
|||||||||||
полосы |
|
|
|
|
|
|
|
|
|
|||||||||||||||
с разделительной |
|
|
1,0 |
|
|
1,0 |
|
1,25 |
|
|
1,4 |
|
|
1,5 |
||||||||||
полосой |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.18 |
||||
Значение частного коэффициента аварийности K5 |
|
|
||||||||||||||||||||||
Радиус кривых в |
|
Менее |
|
|
|
|
|
|
|
|
|
|
|
От 400 |
|
От 1000 |
|
Более |
||||||
плане, м |
|
50 |
|
|
|
100 |
|
|
200…300 |
|
до 600 |
|
до 2000 |
|
2000 |
|||||||||
K5 |
|
|
10 |
|
|
|
5,4 |
|
2,25 |
|
1,6 |
|
|
1,25 |
|
|
1,0 |
|||||||

132
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.19 |
||||||
Значение частного коэффициента аварийности K6 |
|
|
|
|||||||||||||||||||||||
Видимость дороги, |
100 |
|
200 |
|
|
300 |
|
|
|
400 |
|
|
|
Более 500 |
||||||||||||
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K6 |
4,0 |
|
2,9 |
|
|
|
2,0 |
|
|
|
1,4 |
|
|
|
1,0 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.20 |
||||||
Значение частного коэффициента аварийности K7 |
|
|
|
|||||||||||||||||||||||
Ширина проезжей части |
|
Меньше |
|
|
|
Равна |
|
Шире |
|
|
|
|
Шире |
|||||||||||||
мостов по отношению к |
|
на 1 м |
|
|
|
|
|
|
|
|
|
на 1 м |
|
|
|
|
на 2 м |
|||||||||
проезжей части дороги |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
K7 |
|
|
|
6,0 |
|
|
|
|
3,0 |
|
|
|
|
1,8 |
|
|
|
1,0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.21 |
||||||
Значение частного коэффициента аварийности K8 |
|
|
|
|||||||||||||||||||||||
Длина прямых |
|
До 3 |
5 |
|
|
|
|
10 |
|
15 |
|
|
20 |
|
|
|
|
|
Более |
|||||||
участков, км |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
K8 |
|
1,0 |
|
|
1,1 |
|
|
|
|
1,4 |
|
1,6 |
|
|
1,9 |
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.22 |
||||||
Значение частного коэффициента аварийности K9 |
|
|
|
|||||||||||||||||||||||
Пересечения в одном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
уровне при интенсивно- |
|
1000 |
|
|
|
|
1600…3500 |
3500…5000 |
|
От 5000 до |
||||||||||||||||
сти движения по главной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7000 |
|||||
дороге, прив. ед./сут. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
K9 |
|
|
|
1,5 |
|
|
|
|
2,0 |
|
|
|
|
|
3,0 |
|
|
|
4,0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.23 |
||||||
Значение частного коэффициента аварийности K10 |
|
|
|
|||||||||||||||||||||||
Тип пересечения с |
|
|
|
|
|
|
|
В одном уровне при интенсивности |
||||||||||||||||||
|
В разных |
|
|
движения по пересекающей дороге |
||||||||||||||||||||||
примыкающей дорогой |
|
уровнях |
(%) от суммарной по двум дорогам |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Менее 10 |
|
10...20 |
|
|
|
Более 20 |
|||||||||
K10 |
|
|
|
1 |
|
|
|
|
1,5 |
|
|
|
|
3,0 |
|
|
|
4,0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.24 |
||||||
Значение частного коэффициента аварийности K11 |
|
|
|
|||||||||||||||||||||||
Видимость пересечения в |
|
Более |
|
60…40 |
|
40…30 |
30…20 |
|
|
Менее |
||||||||||||||||
одном уровне с |
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|||
примыкающей дороги, м |
|
|
|
|
|
|
|
|
|
|
1,65 |
|
|
|
|
|
|
|
|
|
||||||
K11 |
|
|
|
1,0 |
|
|
|
|
1,1 |
|
|
2,5 |
|
|
|
|
10,0 |
|||||||||
133
Значение частного коэффициента аварийности K12 |
Таблица 10.25 |
|||||||||||
|
|
|
||||||||||
Число полос движения на |
2 |
|
|
3 |
|
|
4 |
|||||
проезжей части |
|
|
|
|
||||||||
K12 для дорог: |
|
|
|
|
|
|
|
|
|
|
|
|
без разделительной |
1,5 |
|
|
1,0 |
|
|
0,8 |
|||||
полосы |
|
|
|
|
||||||||
с разделительной |
– |
|
|
– |
|
|
0,65 |
|||||
полосой |
|
|
|
|
||||||||
Значение частного коэффициента аварийности K13 |
Таблица 10.26 |
|||||||||||
|
|
|
||||||||||
Расстояние от застройки |
|
|
|
|
|
|
|
|
|
|
|
|
до проезжей части, м |
15…20 |
5…10 |
|
5 |
|
|
5 |
|||||
|
|
Имеются |
|
|
|
|
|
|
|
|
Без |
|
Характеристика |
полосы |
Имеются |
|
Имеются |
|
|
тротуаров |
|||||
местного |
тротуары |
|
тротуары |
|
|
и полос |
||||||
|
|
движения |
|
|
|
|
|
|
|
|
местного |
|
|
|
|
|
|
|
|
|
|
|
|
|
движения |
K13 |
2,5 |
|
5,0 |
|
|
7,5 |
|
|
10,0 |
|||
Значение частного коэффициента аварийности K14 |
Таблица 10.27 |
|||||||||||
|
|
|
||||||||||
Коэффициент сцепления |
|
0,2…0,3 |
|
0,4 |
|
|
0,6 |
|
|
0,7 |
||
Характеристика |
|
Скользкое |
|
Чистое, |
|
|
Шероховатое |
|||||
покрытия |
|
|
|
сухое |
|
|
|
|
|
|
||
K14 |
|
2,5 |
|
2,0 |
|
|
1,3 |
|
|
1,0 |
||
Результаты определения коэффициентов аварийности оформляют в виде линейных графиков. Для их построения анализируют план и профиль дороги по каждому из показателей, проведенных выше, и выписывают значение соответствующего частного коэффициента аварийности. Перемножение по вертикали для каждого участка всех коэффициентов дает итоговый коэффициент аварийности.
На линейных графиках итогового коэффициента аварийности целесообразно отмечать, по данным ГИБДД и дорожных органов, места дорожнотранспортных происшествий за несколько лет, с которыми обычно хорошо совпадают пики на графиках. При равных значениях итогового коэффициента аварийности в первую очередь принимают меры к повышению безопасности движения в местах, где было больше зарегистрировано происшествий или они имели большую тяжесть.
134
Порядок выполнения задания и исходные данные
1.Рассчитать скорость движения транспортных средств в потоке по формуле (10.1). Расчетную часовую интенсивность движения N принять 10 % от среднегодовой суточной интенсивности движения, скорость движения оди-
ночного автомобиля V0 принять для легкового автомобиля на участке с уклоном i = 0 (см. табл. 5.3).
2.Сравнить скорость, определенную по формуле (10.1) со скоростью автопоезда на участке с уклоном i = 0 (см. табл. 5.3). Из двух значений скорости для дальнейших расчетов принять меньше, которое обозначено символом v в
формулах (10.4)–(10.6), (10.8) и (10.9).
3.Рассчитать максимальную теоретическую пропускную способность полосы
движения по формулам (10.6) |
и (10.7), при этом принять: |
i = 0 ; λ =ϕ; |
kтор =1; KЭ2 − KЭ1 = 0,1; SР =10 |
м; LТС =5 м. Значения ϕ и |
f вычислить |
для скорости 0,5 v (см. формулы (3.8) и (4.7)); ϕ0 и β принять по табл. 3.2 для асфальтобетонного покрытия; f0 = 0,02 ; K f = 0,0002 .
4. Принять значения коэффициентов β1, β2 , β3 , β5 , β9 , β10 . Расстояние от кромки проезжей части до препятствия на обочине принять равным О−0,5, где О – ширина обочины, м. Учесть, что обочины укрепляются щебнем, а покрытие
проезжей |
части |
имеет |
шероховатую |
обработку. |
Вычислить |
|
β0 = β1β2β3β5β9β10 . Расчет представить в табл. 10.28. |
|
|||||
|
|
|
Расчет β0 = β1β2β3β5β9β10 |
Таблица 10.28 |
||
|
|
|
|
|||
Коэффициент |
|
Значение |
|
Обоснование |
|
|
βi |
|
коэффициента |
|
|
|
|
β1 |
|
|
|
|
|
|
β2 |
|
|
|
|
|
|
β3 |
|
|
|
|
|
|
β5 |
|
|
|
|
|
|
β9 |
|
|
|
|
|
|
β10 |
|
|
|
|
|
|
β0 |
|
|
|
|
|
|
5.Принять значения коэффициентов β4 , β6 , β7 , β8 , β11, β12 , β13 , при этом рассмотреть варианты: участок с максимальным продольным уклоном, участок с минимальным радиусом кривой в плане, участки в зоне пресечения в одном уровне с размещением автобусных остановок на уширении проезжей части. Принять следующие условия: дорога проходит вне населенных пунктов; ограничение скорости ниже 60 км/ч не предусматривается; разметка – осевая; дополнительные полосы на подъем – в соответствии с п. 4.7 СНиП 2.05.02-85*. Два пересечения в одном уровне предусмотреть на прямых участках в плане с продольными уклонами не более 20 ‰, пересечения принять
135
канализированного типа, а для дорог II и III категорий с переходноскоростными полосами. Количество автомобилей поворачивающих налево для первого пересечения принять 40 %, для второго 60 %.
6.Рассчитать практическую типичную пропускную способность полосы движения в характерных участках. Результаты представить в табл. 10.29.
7.Определить необходимое количество полос движения. Результаты представить в табл. 10.29. Коэффициент использования пропускной способности дороги принять: 0,7 для дорог II и III категорий, 0,75 – IV категории.
8.Вычислить уровни загрузки дороги движением KЗ =100z (%). Установить
уровни удобства движения на характерных участках по табл. 10.1. Результаты свести в табл. 10.29.
9.Построить график итоговых коэффициентов аварийности (рис. 10.1). Значение K4 в пределах вертикальных кривых принимать средним из значений
соответствующих сопрягаемым уклонам. Если сопрягаемые уклоны разнонаправленные, то значение K4 принимается в пределах тангенса средним из
значений соответствующих сопрягаемому уклону и уклону равному 0. Ширину проезжей части мостов принять больше ширины проезжей части на дороге не менее чем на 2 м. Интенсивность движения по пересекающей дороге принять более 20 %. Видимость пересечения в одном уровне с примыкающей дороги принять: для дорог II и III категорий более 60 м, IV категории – не менее 40 м. При условии, что дорога проходит вне населенных пунктов K13 =1. Значения коэффициента сцепления принять: для зимних условий 0,2;
для летних – по табл. 3.2. Зоны влияния отдельных объектов принимаются следующие:
подъемы и спуски – 100 м за вершиной подъема и 150 м после спуска; пересечения в одном уровне – по 50 м в каждую сторону; пересечения в разных уровнях – в пределах между примыканиями к
основной дороге переходно-скоростных полос и правоповоротных съездов; кривые в плане при R >400 м с обеспеченной видимостью и переход-
ными кривыми – по 50 м в каждую сторону;
кривые в плане при R ≤400 м и кривые с необеспеченной видимостью
– по 100 м в каждую сторону; мосты и путепроводы – по 1000 м в каждую сторону;
населенные пункты – в каждую сторону по 1000 м.
10. Оформить отчет. В выводах указать уровень удобства движения обеспечиваемый дорогой и дать характеристику запроектированного участка дороги с точки зрения безопасности движения с указанием диапазона вероятного количества дорожно-транспортных происшествий (ДТП/(1 млн. авт. км)), оп-
ределяемого по графику рис. 10.2 (при Kит <10 принимается 0,27
ДТП/(1 млн. авт. км)).
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
136
Основная литература
1.Бабков, В. Ф. Автомобильные дороги [Текст] / В. Ф. Бабков. – М. : Транс-
порт, 1983. – 280 с.
2.Курьянов, В. К. Автомобильные дороги [Текст] : учеб. пособие / В. К. Курьянов, Д. Н. Афоничев, А. В. Скрыпников ; ВГЛТА. – Воронеж, 2007. – 284 с.
Дополнительная литература
3.Автомобильные дороги. Примеры проектирования [Текст] / под ред. В. С. Порожнякова. – М. : Транспорт, 1983. – 303 с.
4.Афанасьев, Л. Л. Конструктивная безопасность автомобиля [Текст] / Л. Л. Афанасьев, А. Б. Дьяков, В. А. Иларионов. – М. : Машиностроение, 1983. – 212 с.
5.Бабков, В. Ф. Проектирование автомобильных дорог [Текст]. В 2 т. Т. 1 / В. Ф. Бабков, О. В. Андреев. – М. : Транспорт, 1979. – 387 с.
6.Бабков, В.Ф. Проектирование автомобильных дорог [Текст]. В 2 т. Т. 2 / В. Ф. Бабков, О. В. Андреев. – М. : Транспорт, 1979. – 407 с.
7.Краткий автомобильный справочник [Текст] / А. Н. Понизовкин [и др.]. – М.
:Транспорт, 1983. – 224 с.
8.Краткий автомобильный справочник [Текст]. В 3 т. Т. 1. Автобусы / Б. В. Кисуленко [и др.] ; под общ. ред. А. П. Насонова. – М. : НПСТ «Трансконсал-
тинг», 2002. – 360 с.
9.Краткий автомобильный справочник [Текст]. В 3 т. Т. 2. Грузовые автомобили / Б. В. Кисуленко [и др.] ; под общ. ред. А. П. Насонова. – М. : ИПЦ
«Финпол», 2004. – 667 с.
10.Краткий автомобильный справочник [Текст]. В 3 т. Т. 3, ч. 1. Легковые автомобили / Б. В. Кисуленко [и др.] ; под общ. ред. А. П. Насонова. – М. : [б.
и.], 2004. – 448 с.
11.Краткий автомобильный справочник [Текст]. В 3 т. Т. 3, ч. 2. Легковые автомобили / Б. В. Кисуленко [и др.] ; под общ. ред. А. П. Насонова. – М. : [б.
и.], 2004. – 560 с.
12.Курьянов, В. К. Автомобильные дороги. Тема: Диагностика автомобильных дорог [Текст] : метод. указания / В. К. Курьянов, Д. Н. Афоничев, А. В. Скрыпников ; ВГЛТА. – Воронеж, 2006. – 28 с.
13.Курьянов, В. К. Лесотранспорт как система: водитель – автомобиль – дорога
–среда [Текст] / В. К. Курьянов ; ВГЛТА. – Воронеж, 2002. – 251 с.
14.Смирнов, М. Ю. Весовой контроль на автомобильных дорогах [Текст] / М. Ю. Смирнов, Ю. С. Андрианов. – Йошкар-Ола : МарГТУ, 2002. – 118 с.
15.СНиП 2.05.02-85*. Автомобильные дороги / Госстрой России. – М. : ФГУП ЦПП, 2004. – 54 с.
16.СНиП 2.05.03-84*. Мосты и трубы/ Минстрой России. – М. : ГП ЦПП, 1996.
–214 с.
137
17.СНиП 2.05.07-91*. Промышленный транспорт / Госстрой России. – АПП ЦИТП, 1996. – 120 с.
18.СНиП 2.05.11-83. Внутрихозяйственные автомобильные дороги в колхозах, совхозах и других сельскохозяйственных предприятиях и организациях [Текст]. – М. : Стройиздат, 1984. – 23 с.
ОГЛАВЛЕНИЕ
Введение……………………………………………………………………………...3 Задание № 1………………..…………………………………………………………4 Задание № 2………………..………………………………………………………..14 Задание № 3………………..………………………………………………………..33 Задание № 4………………..………………………………………………………..41 Задание № 5………………..………………………………………………………..56 Задание № 6………………..………………………………………………………..62 Задание № 7………………..………………………………………………………..70 Задание № 8………………..………………………………………………………..85 Задание № 9………………..………………………………………………………..95 Задание № 10..……………..………………………………………………………119 Библиографический список…..…………………………………………………..139
Афоничев Дмитрий Николаевич
АВТОМОБИЛЬНЫЕ ДОРОГИ
Методические указания к практическим занятиям по разделам:
«Общие сведения об автомобильных дорогах», «Закономерности движения транспортных средств по автомобильным дорогам»,
«План и продольный профиль дороги» для студентов специальности 240400 (190702) – Организация и безопасность движения
Подписано в печать 24.11.2008. Формат 60х84 /16. Объем 8,75 п.л. Усл. печ. л. 8,14. Уч-изд. л. 11,44. Тираж 100 экз. Заказ
ГОУ ВПО «Воронежская государственная лесотехническая академия» РИО ГОУ ВПО «ВГЛТА». 394087, г. Воронеж, ул. Тимирязева, 8 Отпечатано в УОП ГОУ ВПО «ВГЛТА». 394087, г. Воронеж, ул. Докучаева, 10
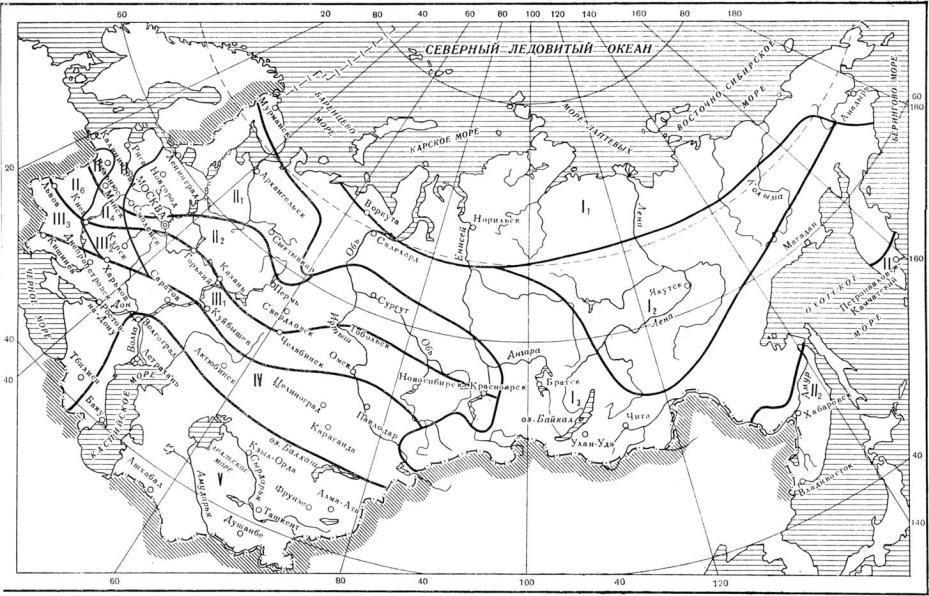
Рис. 2.1 Карта дорожно-климатических зон Российской Федерации